履带式下楼急救车装置
2020-06-28陈彦竹马立帅杨诗雨杨清浩
陈彦竹, 王 丽, 马立帅, 杨诗雨, 杨清浩
(辽宁石油化工大学 机械工程学院, 辽宁 抚顺 113006)
0 引言
现如今有大量高层住宅电梯的大小不足容纳传统担架的平放[1],随着人口老龄化程度越来越严重[2],突发性疾病致死的病例越来愈多, 并且此类疾病发病率趋于年轻化[3]。此外转移心脑血管疾病等突发疾病病患时对转移病患的方式有特殊要求,不可以使用蛮力要保持平稳[4],这给要求在抢救和运输时必须保持平躺的病患的急救工作带来了很大的困难。
现存转移病患的方式有人力辅助和机械辅助。 人力辅助有传统担架和分段式担架[5]等,传统担架无法进入狭小的电梯,且耗费人力;手动分段式担架需要人力拉拽,转移质心波动大,危险系数高;机械辅助有履带式轮椅[6]等,虽能实现机电控制下楼的功能,但无法满足病患的平躺需求。因此一种既能满足病患平躺需求,又能安全且快速下楼的装置应运而生。
1 整体设计
1.1 总体方案
如图1 所示, 履带式下楼车装置总体结构分为三部分,从上至下分别为承载装置、支撑调平装置和动力行走装置。
1.2 结构设计

图1 履带式下楼车整体模型
(1)承载装置。 如图2 所示,上部分有承载架,其上运用棘轮机构制成的锁扣巧妙地固定传统担架; 其两侧护栏内设弹簧可折叠。

图2 承载板
(2)支撑调平装置。 如图3 所示,中间部分有支撑和调平两部分。

图3 支撑调平装置图
支撑部分采用两组直线电机,来支撑连接上、下两部分装置,并配合动力行走装置与调平部分完成工作,解决重心前移问题。 调平部分为两个水平调节器和四个直线电机相互配合,在工作过程中,水平感应器感应到支撑板与直线电机之间的角度变化, 前组直线电机会通过齿轮传动迅速平稳升降, 使上承载板水平。 在下楼调平过程中,利用涡轮蜗杆的自锁功能可在直线电机与上、下两部分铰接处转动至所需角度并固定。
(3)动力行走装置。 如图4 所示,下部分采用橡胶履带,增加与楼梯之间的摩擦力的同时还起到减震作用,运用电机控制履带实现装置运动, 在下楼过程中通过电机制动和人力辅助减小速度,确保装置能以安全速度下楼。在楼梯缓步台转弯过程中,四个轮子解除地面,后驱动轮提供动力,前万向轮调节方向。

图4 轮履转换底盘
2 履带式下楼急救车装置设计
2.1 机械系统设计
(1) 涡轮蜗杆可实现支撑杆与履带部分连接处角度的固定。满足急救过程中病患的平躺需求,并且该结构的自锁功能,保证装置在工作过程中的安全和平稳。
(2) 支撑板的轴承在缓步台将病患旋转180°到达下一个楼梯的起始点并继续工作。
2.2 控制系统设计
(1)电机提供动力和制动作用,控制履带保持适当的安全速度。
(2)涡轮蜗杆自锁功能使直线电机转动至所需角度后固定, 保证与直线电机的接触点不发生相对运动来保障安全。
(3)通过水平调节器控制直线电机工作,使病患随时保持水平。
3 履带式下楼急救车装置运动转换分析
3.1 对系统水平和工作状态下的质心位置分析

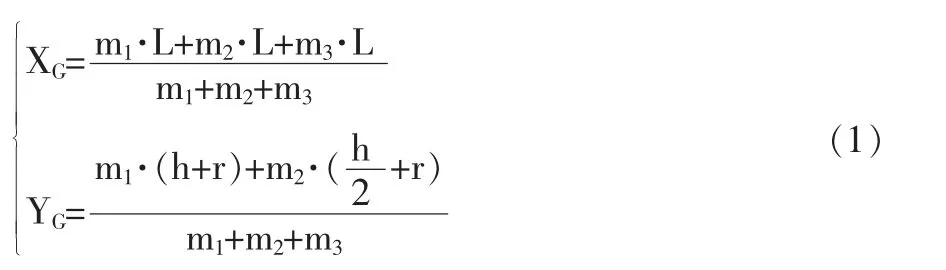
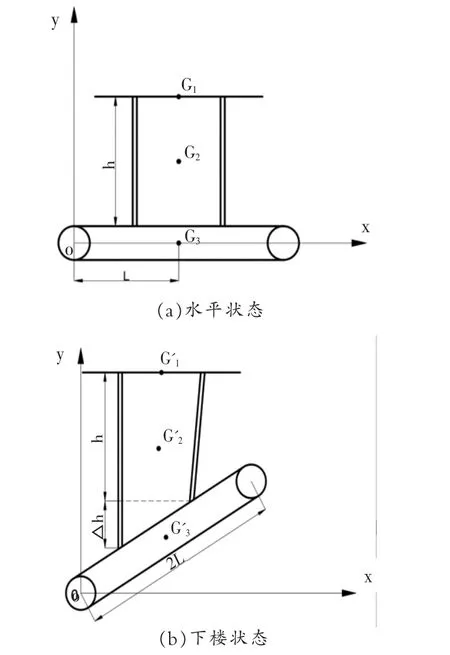
图5 系统的质心分布
如图5(b)所示下楼状态,θ 为楼梯坡度角,为保持水平,前直线电机组上升△h,后直线电机组的高度基本不变,为了方便质心的计算,直线电机组的质心可近似看作直角梯形;
则该系统在下楼状态时的质心为:

由式(1)和式(2)可知:

故质心在缓步台到下楼过程中质心是向前并向上有稍微移动, 可以通过装置的蜗轮蜗杆结构控制装置的整体位置和人力辅助以达到质心基本稳定的作用。
3.2 对履带接触楼梯踏步斜面的临界状态分析
3.2.1 履带接触楼梯踏步斜面的不踏空条件分析
装置在整个工作过程中,履带接触缓步台和缓步台接触履带时是系统最为危险的时间点,也是力学模型的临界状态,a 为楼梯踏步高度,b 为楼梯踏步宽度。 为保证履带与楼梯踏步间不发生倾倒,踩空等事故,履带在到达第一个台阶开始倾倒时并不踏空的条件下履带半长L 应满足:

履带能够安全到达下一个台阶并不踏空,总长2L 需满足:

根据国家行业标准, 建筑楼梯的坡度不超过45°,可得以下约束条件:
所以履带总长2L(含履带间空隙)应满足:

3.2.2 履带接触楼梯踏步斜面的作用力分析
根据装置爬楼梯过程中履带与楼梯接触的方式,分析履带与楼梯的相互作用力[8]。图6 为履带爬楼梯与楼梯接触的受力图, 将履带的受力均分解为履带和楼梯接触点的切向和法向的真实作用力,F1和N1分别表示装置所受的等效牵引力和等效支撑力,F11和N11分别表示履带机器人所受的真实牵引力和真实支撑力,fs表示履带与楼梯的静摩擦因素,θ 表示履带与楼梯踏步间的夹角。

图6 履带与楼梯台阶受力分析
履带棱与楼梯台阶不滑移(图6a)的等效充分必要条件为:

履带与台阶接触不发生滑移(图6b)的充分必要条件为:
4 履带式下楼急救车装置的特点
履带式下楼急救车装置具有结构比较简单, 成本较低廉等特点,以杆件为基础,完成多构件的配合,容易拆卸,方便后期维修。该装置主要以电力提供动力和制动功能,机械间相互配合能够解决高层病患保持安全、平稳、平躺转移至救护车的难题。
5 结论
针对现有的下楼转移人员的方式具有不能满足平躺需求、效率低和安全系数低等缺点,提出了专对急救转移的履带式下楼急救车装置。
通过对装置的质心进行分析, 保证装置不会倾倒;对履带与楼梯踏步间的受力分析及履带的极限长度, 确定了履带不发生滑移和不踏空的条件。
结合“机械控制设计”和“系统控制设计”两大主要控制功能确立整个装置工作过程中的运动机理, 保证整个转移过程中的安全性和连续性。
