智能带式输送机巡检机器人在煤矿的应用
2020-06-26邵珠娟邓晓刚程豪杰杜才溢张玉江
邵珠娟 邓晓刚 程豪杰 杜才溢 张玉江,,3
(1.山东能源临沂矿业集团有限责任公司,山东省临沂市,276017;2.太原理工大学矿业工程学院,山西省太原市,030024;3.山东能源集团博士后科研工作站,山东省济南市,250014)
矿山安全巡检是保证矿山开采安全的重点工作之一,其主要的检查内容包括排水系统、开采系统、电力、矿内外环境等。安全巡检工作不仅需要安全巡检人员每天定时开展巡检工作,还要投入大量的时间和物力,以确保全面掌握整个矿山运行情况。当前,人工巡检方式存在工作量大、效率低、过分依赖巡检人员经验以及人力资源浪费等问题。随着技术的进步和矿山等高危行业要求的提高,通过智能巡检机器人来代替人工巡检,实现直观可视化管理,对降低劳动强度、提高煤矿管理水平、推动矿山工作管理模式向数字化、现代化方向发展以及确保矿山的安全生产具有重要意义。
智能巡检机器人多应用于电力、油田管道、地下管廊的安全巡检,可以实现可见光、红外线、语音交互、环境检测及智能分析功能。随着煤矿行业“自动化减人,智能化无人”的要求,当前矿用巡检机器人开始越来越受到重视。杨学军等[1]研究人员开展了液压支架巡检机器人姿态研究,并提出了相关模型,对液压支架直线度、姿态等重要参量进行结算;蒋春鹏[2]提出了改进的电动输电线巡检机器人方案,并对其关键结构进行设计;潘祥生、周展等[3-5]研究人员研究了一种适用于煤矿井下巷道的矿用悬线式巡检机器人,分析了其动力学特性和控制系统;李学民[6]分析了特殊环境下井下巡检机器人的研究现状及关键技术;裴文良等[7]研究人员研发了适用于水泵房、变电站等井下硐室设备自动巡检的防爆巡检机器人;张士海[8]详细介绍了龙王沟煤矿主斜井应用的矿用巡检机器人,认为矿用巡检机器人的应用显著提高了巡检效率,具有良好的经济技术效益;陆文涛、马静雅等[9, 10]研究人员设计了矿用输送机巡检机器人,提高了带式输送机的故障处理效率。
然而,煤矿用智能带式输送机巡检机器人的研究仍然不成熟,随着现在人力成本不断提高,国家提出“智能制造”战略和“安全矿山”方针,对智能带式输送机巡检机器人在煤矿的应用提出了更高的要求,现场应用效果对智能带式输送机巡检机器人研究的完善发挥了重要的推动作用。
1 智能带式输送机巡检机器人应用要求及结构组成
1.1 智能带式输送机巡检机器人应用要求
鉴于煤矿井下带式输送机工作环境的特殊性和复杂性,智能带式输送机巡检机器人需要满足以下条件。
(1)工作环境湿度大,需要考虑湿度对智能带式输送机巡检机器人精度和稳定性的影响。
(2)大型机电设备附近存在电磁和射频干扰,要求智能带式输送机巡检机器人系统具备较强的抗干扰能力。
(3)工作空间具有长度大、起伏转弯且空间狭小等特点,这对智能带式输送机巡检机器人的行走速度、最大行走距离、爬坡能力、转弯半径、控制方式提出较高要求。
(4)运煤廊道巡检要求具有一定的智能性和强大的监控功能,包括对机电设备温度监控、气体浓度监控、视频监控等功能。
(5)智能带式输送机巡检机器人应保证安全,具备充电闭锁功能。
(6)智能带式输送机巡检机器人具备环境检测分析、声音采集及双向对讲、本体自检、远程控制等功能。
(7)通过强大的远程监控平台,具备实现环境与设备不间断的移动监控监测、应急火灾报警与处置的功能。
1.2 智能带式输送机巡检机器人结构组成
为了实现上述功能,智能带式输送机巡检机器人设计有驱动系统、图像采集系统、语音对讲及应急广播系统、环境检测系统、智能防撞与避障系统等。智能带式输送机巡检机器人结构组成如图1所示。
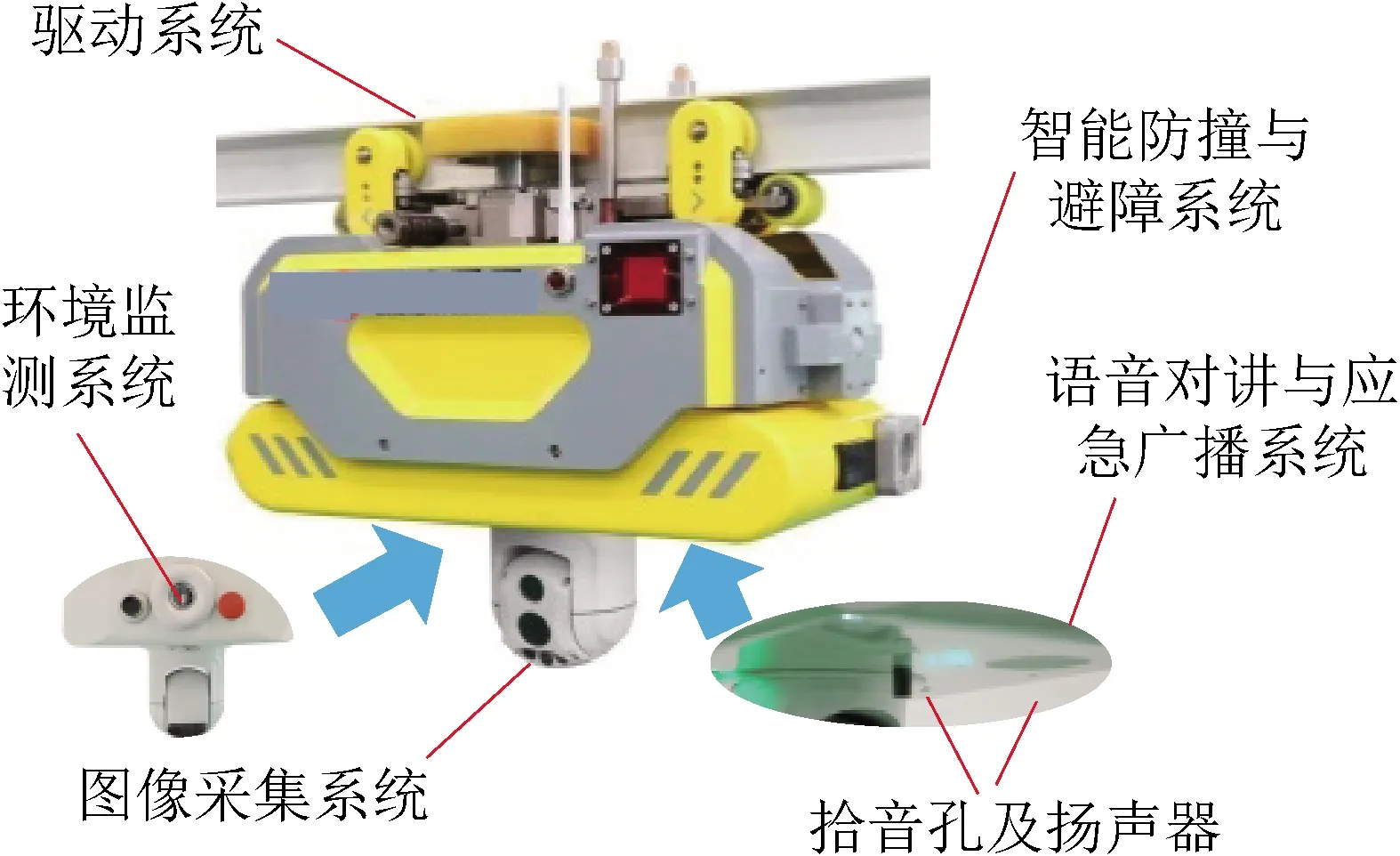
图1 智能带式输送机巡检机器人结构组成
(1)驱动系统。由于选煤厂带式输送机廊道内地形复杂,智能带式输送机巡检机器人运行轨道存在转弯、上下坡困难等情况,为了使智能带式输送机巡检机器人在各种情况下都能平稳行走,需要有较好适应能力的行走机构。因此,设计了驱动系统,该系统设计有左右压紧机构、水平旋转机构和垂直旋转机构,可保障智能带式输送机巡检机器人多方位稳定巡检。驱动系统结构示意图如图2所示。
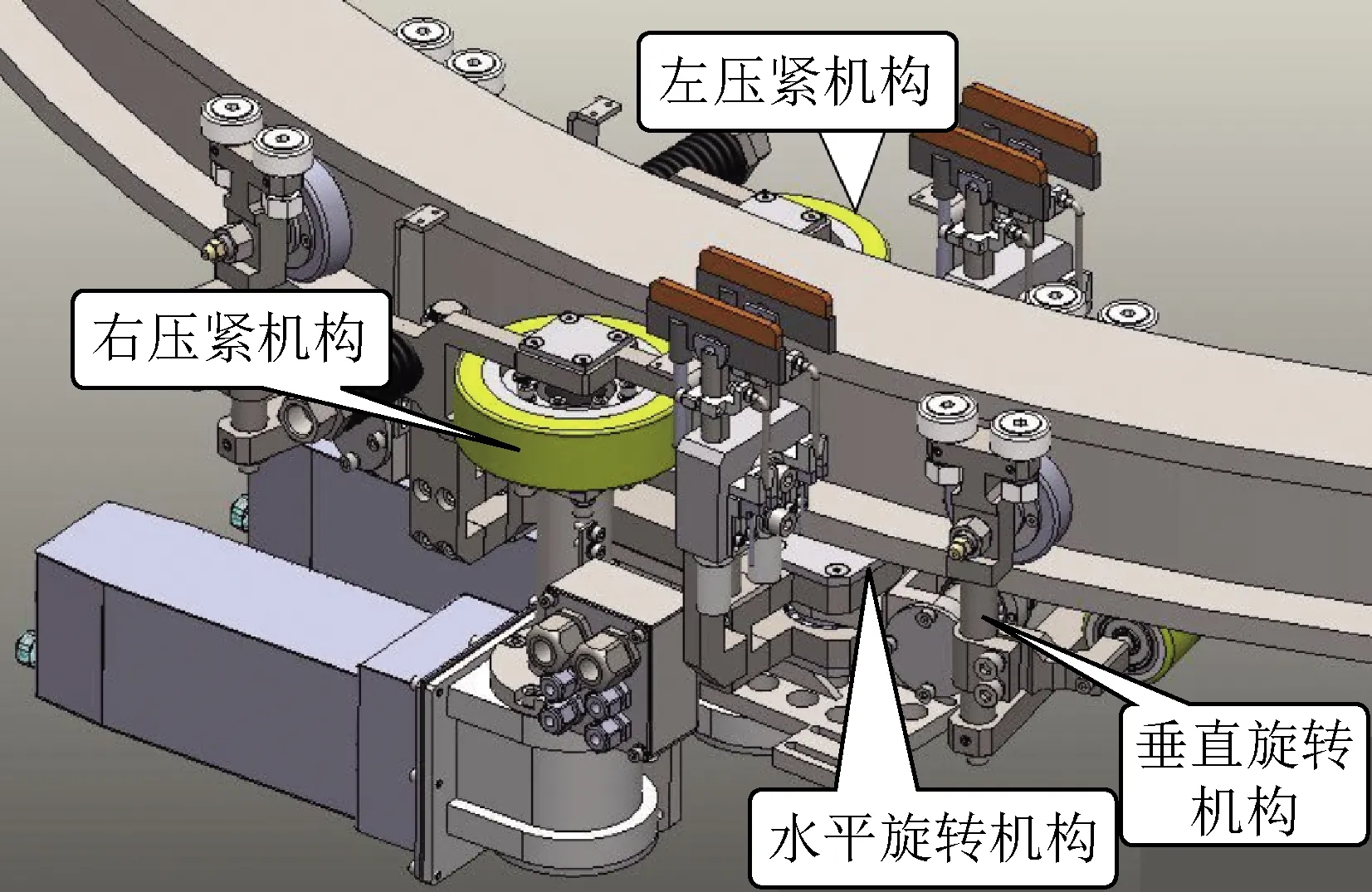
图2 驱动系统结构示意图
(2)图像采集系统。图像采集系统搭载一体化高性能云台,红外热成像及可见光摄像机参数见表1。

表1 图像采集系统参数表
(3)语音对讲及应急广播系统。语音对讲和应急广播系统集扩音对讲、语音监听、消防广播和调度功能于一体,实现现场与调度室的交互式对话及紧急通讯。根据使用要求,该系统语音监听范围为5~80 m2,且灵敏度可调,输出阻抗为600~1000 Ω的非平衡电阻,在1 m距离40 dB音源情况下,信噪比为85 dB,接收频率范围为20~20 kHz。
(4)环境检测系统。环境检测系统具备气体检测、温度湿度检测、烟雾检测、光照度检测和火焰探测功能。对于矿山特殊工作环境来说,气体检测尤为重要。智能带式输送机巡检机器人检测实现了4种气体高浓度连续检测,可实现超限报警。气体检测指标见表2。
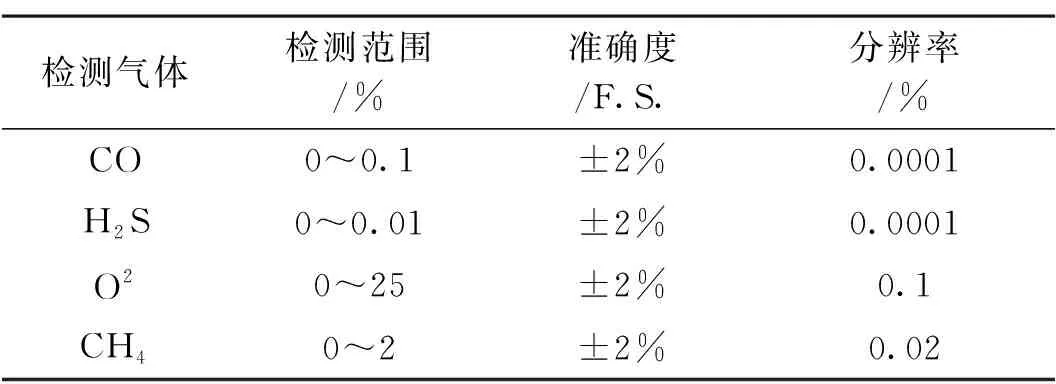
表2 气体检测指标
温度、湿度检测的测量范围为温度-40℃~+123.8℃,湿度为0%~100%RH,温度和湿度的测量精度分别为±0.5℃和±4.5%RH。烟雾检测灵敏度为0.5 db/m(±0.1 dB/m)。光照度检测的测量范围为0~65535 Lux,并且可按照不同光照场景进行智能调整,具体为:黑夜时为0.001~0.02 Lux,月夜时为0.02~0.3 Lux,阴天室内时为5~50 Lux,阴天室外时为50~500 Lux,晴天室内时为100~1000 Lux。火焰探测也尤为重要,火焰探测采用检测紫外线波长(185~260 nm)的紫外光辐射探测器,检测参数见表3。
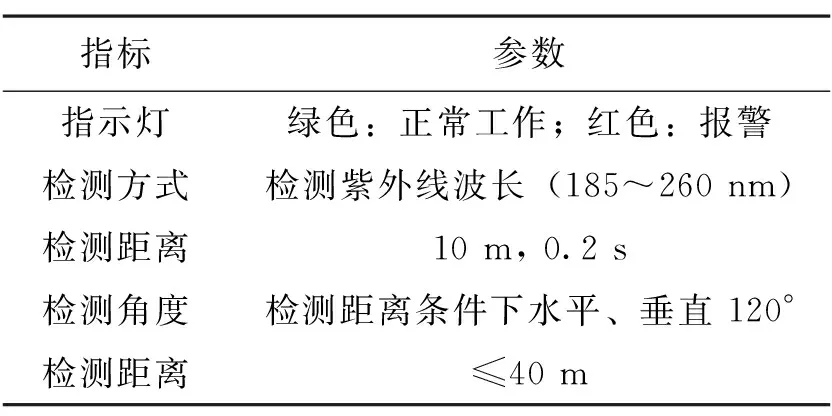
表3 火焰探测参数指标
(5)智能防撞与避障系统。智能防撞与避障系统是保证智能带式输送机巡检机器人长期稳定运行的重要组成部分。该系统通过对障碍物和隧道内工作人员进行探测和自身高精度定位,实现智能防撞和避障功能,遇到障碍自动停止并报警。同时,从本质安全角度考虑,加装安全触边,防止碰撞造成人员及设备损伤。该系统的探测距离为0~3 m,探测角度为120°,可实时更新自身位置信息,定位精度达0.01 m。同时设置有断电制动功能,当智能带式输送机巡检机器人在运行过程中,如遇故障断电,智能带式输送机巡检机器人可立即停止,起到保护作用。
2 智能带式输送机巡检机器人现场应用及效果
2.1 智能带式输送机巡检机器人现场应用
2019年1月,智能带式输送机巡检机器人在山东能源临沂矿业集团下属的山东里能鲁西矿业有限公司(以下简称鲁西煤矿)进行现场应用。通过现场工业性试验及应用,智能带式输送机巡检机器人满足带式输送机运输安全监控的实际需求,系统运行状况良好,监测性能稳定可靠,故障识别能力强,报警及时且信息准确可信。智能带式输送机巡检机器人实现了直观可视化的管理。通过带式输送机管理系统的建设,实现了巡检可视化、一键智能巡检、智能报警等功能。智能带式输送机巡检机器人现场监控画面及运行参数如图3所示。
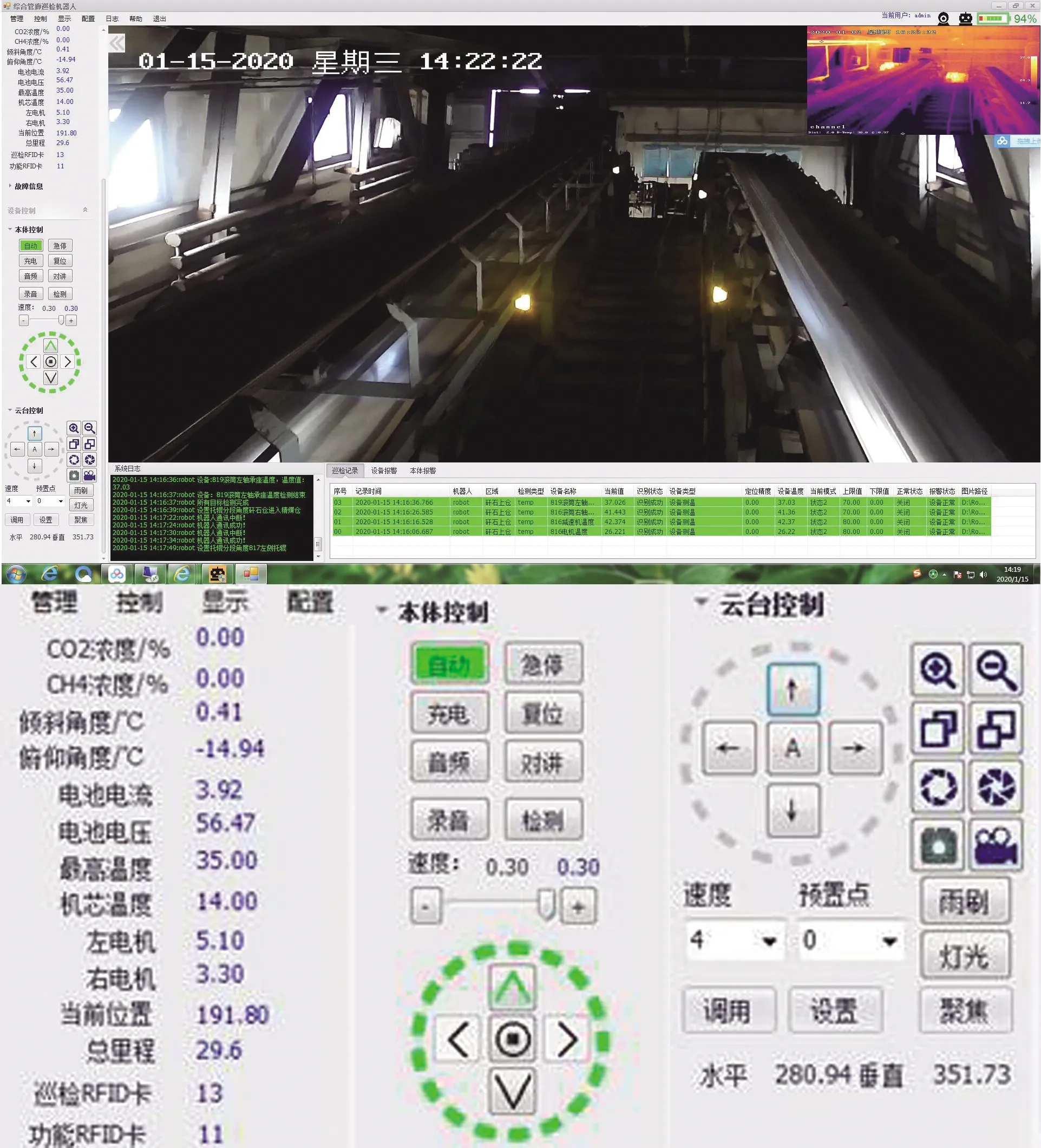
图3 智能带式输送机巡检机器人现场监控画面及运行参数
由图3可以看出,智能带式输送机巡检机器人系统对现场画面及监控设备运行参数可以实时调取。在视频监控的同时,在右上角实时显示红外摄像机监控图像并显示最高温度。
智能带式输送机巡检机器人可通过操作界面实现实时监控、历史数据、参数设置等功能,实现对智能带式输送机巡检机器人的远程控制,实现远程在线监测与现场巡检相结合,在带式输送机廊道内打造无人巡视与处置管理新模式。智能带式输送机巡检机器人功能设置界面如图4所示。
2.2 智能带式输送机巡检机器人应用效果
鲁西煤矿在智能带式输送机巡检机器人应用前,人员定额为85人,应用智能带式输送机巡检机器人后,人员定额为25人,年节约资金500万元以上。智能带式输送机巡检机器人提高了自动化程度和故障处理效率,大大降低了工人的劳动强度和事故带来的损失,取得了良好的技术经济效益。在保证安全和生产稳定的前提下,智能带式输送机巡检机器人实现了“自动化减人”的目标。
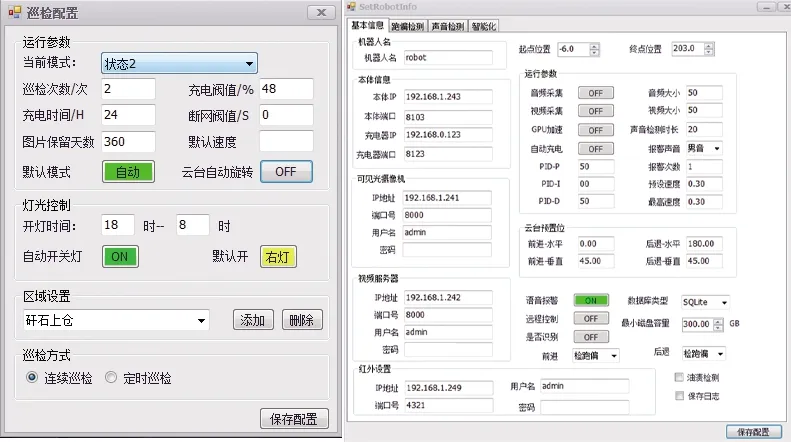
图4 智能带式输送机巡检机器人功能设置界面
3 结语
(1)智能带式输送机巡检机器人可以通过各种传感器对设备、作业空间环境等基础数据进行搜集,并充分发挥集团大数据分析中心优势,利用大数据算法及时掌握和判断设备的运行状况,实现了设备性能的充分利用。
(2)智能带式输送机巡检机器人可以实现对带式输送机廊道工作环境和设备的全方位监测,实现可视化管理和实施预警,提升了巡检效率和准确性。进一步通过机器人和技术人员的联动互馈,实现了对异常情况的及时处理。
(3)智能带式输送机巡检机器人的应用实现了“自动化减人”的目标,降低了成本,提高了自动化程度和故障处理效率。
