基于无人机影像匹配点云数据的喀斯特峡谷区火龙果单株提取研究
2020-06-24尹林江周忠发黄登红尚梦佳
尹林江,周忠发,*,黄登红,尚梦佳
(1.贵州师范大学 喀斯特研究院/地理与环境科学学院,贵州 贵阳 550001; 2.国家喀斯特石漠化防治工程技术研究中心,贵州 贵阳 550001)
农作物识别与提取是农情监测、管理和估产中重要的基础工作[1]。目前,遥感技术已普遍运用于各种地物的识别、提取中。但传统的卫星影像空间分辨率不高,导致作物的提取与识别精度不高,无法满足小范围作物的快速提取与识别。而无人机(unmanned aerial vehicle,UAV)起源于军事用途,随后逐渐向民用领域拓展,其特点主要有无人驾驶、飞行尺度较大、环境要求较低、飞行成本较低等[2-3],弥补了航天航空影像空间分辨低、重访周期长和受云雨天气影响的不足[4-7]。
随着科技的不断进步,无人机与遥感器的准入门槛也逐渐降低[8-9]。通过搭载不同的传感器,可获取高时空分辨率的影像数据和点云数据。目前国内外有关学者已利用无人机影像点云数据和LiDAR数据实现了树木的相关提取,如运用无人机搭载LiDAR,对树木进行提取[10-12];刘群[13]运用小光斑机载LiDAR点云数据,运用新的三维单木分割方法对美国华盛顿州西部国会的蓝岭地区的森林进行了单木分割;李亚东等[14]运用无人机影像三维点云数据对树冠进行分割,并对森林蓄积量进行了估测;陈崇成等[15]运用无人机影像匹配点云数据对苗圃单木冠层三维进行分割;李莹等[16]提出一种综合影像重建点云与光谱信息的城市植被分类方法,总体分类精度达到92.08%;Dandois等[17]使用轻小型飞行,使用Bundler等工具提取的样地优势木平均高与实测数据之间的决定系数(R2)为0.84;刘见礼等[18]利用无人机影像匹配点云数据,提出了联合“局部最大值”与“单木结构分析”的单木识别算法;Ni等[19]使用无人影像数据生成的点云数据,在大兴安岭林区对林分尺度上基于影像点云提取的林分树高与LiDAR结果进行对比,R2与均方根误差(RMSE)分别为0.87和1.9 m。
无人机激光点云数据和影像匹配提取树木单木的技术已相对成熟,但是在针对喀斯特山区的无人机影像匹配点云数据开展农作物精准识别研究较少,多为运用高光谱和无人机可见光影像等数据对火龙果、山药等农作物进行提取研究[20-22],但未能解决在崎岖地形和有杂草干扰等背景下的识别提取。本研究利用Pix4Dmapper等软件获取和处理无人机影像匹配点云数据,对特色经济作物火龙果进行株数提取,以期为喀斯特地区农作物精准识别与管理提供参考。
1 材料与方法
1.1 研究区概况
研究区位于贵州省关岭县和贞丰县交界处的北盘江花江段河谷两岸的花江石漠化生态综合治理示范区内的北岸,示范区地理范围为105°35′00″~105°43′05″E、25°37′20″~25°42′36″N。北盘江北岸是典型峰丛、台地地貌,南岸发育峰丛、峰丛深洼地地貌类型。随着农业种植结构的调整,传统的农业生产方式也发生改变,外出务工、果园、养殖成为当地的主要经济来源,其主要的经济作物为花椒和火龙果。本文选取示范区的坝山村杨柳树组内的火龙果种植区作为研究样区,其中实验样地面积为1 307.23 m2,验证样地面积为2 154 m2。通过野外田间调查,得到实验样地火龙果株数为238株,验证样地火龙果株数为342株火龙果,平均株高为1.5 m。
1.2 数据获取与分析
本研究使用的UAV平台为大疆精灵3 SE(Phantom3 SE)四旋翼无人机质量为(含电池及桨)1 236 g。其最大上升速度为5 m·s-1,最大下降速度为3 m·s-1,卫星定位模块为GPS/GLONASS双模,保证了定位精度的可靠性。使用的是一体化云台相机,可控转动范围为俯仰-90°~+30°,相机镜头参数为FOV94°20 mm(35 mm格式等效),相片ISO曝光范围100~1 600,快门速度8~1/8 000 s,相片分辨率4 000 pixel×3 000 pixel,有效像素为1 200万。原始影像采集于2019年7月28日12:24—12:38,风力1级,天气晴朗。运用DJI GS Pro软件自动规划航线,以覆盖整个实验场,由于受到地形等环境因素以及目标区火龙果的生长情况的影响,飞行高度设为80 m,飞行路径设计以确保至少70%的侧重叠和85%的前向重叠的重叠图像,共得到316张照片。
将得到的无人机影像利用Pix4Dmapper软件进行影像的空三加密、特征点匹配、影像拼接、校正等,生成数字表面模型(digital surface model,DSM)、高分辨率正射影像,以及由稀疏点云加密得到的点云。正射影像的分辨率为2.2 cm(图1),密集点云数为131 799 729点,平均点密度为1 130.91 点·m-2。从获取的正射影像中,选取样地进行火龙果株数提取与验证。从图2研究样地来看,该研究区内,地表存在大量杂草以及部分人为建筑物,背景与目标地物混淆。
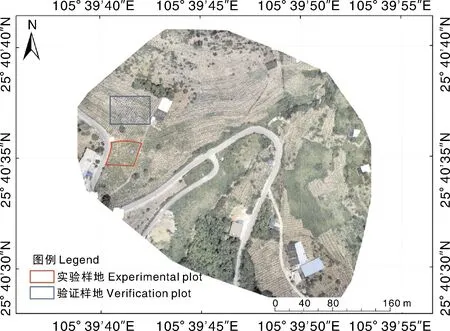
图1 无人机正射影像图Fig.1 Orthophoto image of UAV
由于地物间存在差异,在红波段(R)、绿波段(G)、蓝波段(B)特征上具有不同的数值[23]。通过影像取样得到相关地物的剖面RGB值曲线,如图3-a所示,在横轴0~20和70~80为土壤的RGB曲线,在20~70为火龙果的RGB值曲线。由此可见,火龙果与土壤之间存在明显差异,火龙果在G波段较为突出,具有较强的指示性,土壤则在R波段上具有较强的指示性;从其变化规律来看,土壤在RGB三个波段上的数值波动较为平缓,而火龙果植株在RGB三个波段上则较为剧烈,由此两者具有很好的分离性。在图3-b中,在横轴0~25和75~90为土壤的RGB曲线,在25~75为火龙果的RGB值曲线。火龙果植株与杂草的RGB值两者变化规律相似,3个波段上无明显的差别,均在G波段上具有较强的指示性。由此可见,杂草具有较强的混淆性,分离性较差,若运用常用可见光颜色指数进行火龙果株数的提取,将难以达到较好的提取效果。而无人机影像匹配点云数据为空间三维数据,带有坐标和高程信息,可以较好地分离植株下方杂草和土壤,由此本研究基于无人机影像匹配点云数据对火龙果株数提取进行研究。

图2 研究样地Fig.2 Experimental plot

图3 影像取样RGB值曲线Fig.3 RGB value curve of image sampling
1.3 研究思路
如图4所示,从火龙果影像匹配点云数据与树木的激光点云数据来看,火龙果点云数据分布的空间形态与树木点云的分布形态相似,都具有一定的空间层次结构。但机载激光雷达数据具有位置、方位/角度、距离、时间、强度和回波次数等信息,而无人机影像匹配点云数据则只有坐标和高程信息。研究运用机载激光雷达单木识别方法对火龙果进行株数的提取分析,探究其可行性。常见机载激光雷达单木识别方法可分为基于冠层高度模型(canopy height model,CHM)的单木识别法和基于点云分布的单木识别法2类[24]。
本文选用CHM单木识别法对火龙果株数进行提取。CHM是一个表示树冠上表面距地面高度和树冠水平面积的模型,在一定程度上可以解决地形对植被冠高的影响。其通过数字高程模型(digital elevation model,DEM)和数字表面模型(digital surface model,DSM)两者的差值实现对作物冠层的提取,并以CHM为基础进行火龙果株数的提取。其计算公式如下:
VCHM=VDSM-VDEM
。
(1)
式(1)中:VCHM为冠层高度模型,VDSM代表有作物的下伏地形模型及数字表面模型,VDEM代表没有作物的下伏农田地形及数字高程模型。
1.4 精度验证
精度评估参考Li等[25]的文章,通过与野外数据比较,分别记录提取得到的火龙果总数、正确分割的棵数、错误分割的棵数、漏分的棵数,按照下面的公式分别计算Recall(r)、Precision(p)和F-score(F)的值。 Recall表示监测率,Precision表示正确率,F-score为综合考虑错分和漏分的总体精度,三者的变化范围均在0~100%。计算公式如下:

a, 火龙果影像匹配点云数据;b,树木激光点云数据。a, Pitaya image matching point cloud data; b, Tree laser point cloud data.图4 火龙果点云数据与树木点云数据对比图Fig.4 Comparison of pitaya point cloud data and tree point cloud data
r=NTP/(NTP+NFN)×100%。
(2)
p=NTP/(NTP+NFP)×100%。
(3)
F=2×(r×p)/(r+p)×100%。
(4)
式(2)~(4)中:r表示树木的监测率;p表示树分割的正确率;F表示综合考虑错分和漏分的总体精度;NTP表示树木被正确分割的株数;NFN表示树木未被检测及漏分的树木株数;NFP表示错误检测的树木株数。
1.5 技术路线
通过对试验区影像点云进行去噪及归一化处理,利用渐进式形态学滤波算法,通过控制滤波窗口尺寸大小,将点云分为地面点和非地面点。采用TIN插值方法填补点云“空洞”,将地面点生成DEM和DSM。再利用DEM和DSM获得CHM数据。通过CHM数据,获取单棵火龙果冠层顶点位置,即种子点,以及火龙果冠层。最后与目视解译的火龙果株数进行对比分析,计算其精度。

图5 火龙果株数提取技术路线图Fig.5 Technical roadmap for extracting plant number of pitaya
2 结果与分析
2.1 DEM/DSM特征分析
由于无人机影像匹配点云数据质量较差,部分存在点云缺失。为了得到高分辨率和高质量的DEM和DSM数据,本研究采用改进的渐进加密三角网滤波算法进行点云分类,此算法先通过一个起始点生成一个稀疏的三角网,然后再通过迭代处理逐层加密,直至将点云分类完毕,得到地面点和植被点。最后采用不规则三角网(triangulated irregular network,TIN)插值中的无凹坑TIN,构建网络,剔除高程异常的点云,生成不带明显尖峰的三角网。在此基础上进行点云补洞,通过分析邻近栅格单元,并使用TIN插值方法计算出数据值,填入无值区域。其结果如图6所示。
图6-a为提取的DEM,b为DSM,分辨率均为5 cm,质量较好,无漏洞。从DEM与DSM的数值来看,DSM最低与最高值均大于DEM对应值,其原因为两者的基础数据源不同。从图6-b来看,数字表面模型包含了地表建筑物和火龙果等高度信息,与DEM相比,DEM只包含了地形的高程信息,DSM是在DEM的基础上,进一步涵盖了除地面以外的其他地表信息的高程。由此可以看出,当DEM与DSM求差值时,则可以将地面、植被以及建筑分离,即得到CHM。
2.2 识别提取与精度分析
图7为计算得到的火龙果冠层高度模型数据,从图中可以看出,在该样地中火龙果的冠层被提取出来,但还包含了如建筑物和梯坎等信息。由此本研究从2个方面对火龙果的株数进行提取研究,分别为:(1)基于CHM的火龙果种子点提取;(2)基于CHM的火龙果冠层提取。
2.2.1 基于CHM型的火龙果种子点提取
以CHM为基础,进行种子点的生成。其原理为,对CHM进行高斯平滑处理,平滑窗口为55,去除噪声点的影响;通过设定一个搜索窗口,剔除高于和低于设置的树高阈值的值,进而得到植被范围;再通过搜索冠层范围内局部最大值,进而得到种子点,即火龙果的位置点。
图8为实验样地火龙果株数的提取结果。红色圆点表示CHM生成的种子点的位置,绿色圆点为通过目视解译获取的参考火龙果冠顶点位置。从实验样地的地物复杂程度来看,地物杂草较多,并存在建筑物;从地形上来看,验证样地地形较为复杂,存在许多梯坎,这些因素将在一定程度上对提取的结果产生影响。
通过对比种子点与目视解译火龙果参考冠顶点位置将提取结果分成4类,主要存在错检(图9-b)、过检(图9-c)和漏检(图9-d)的现象。当同一火龙果上红点与绿点的个数比为1时,视为正检;同理,当个数比大于1时,视为过检;当个数比为无穷大时,视为错检;当个数比为0时,视为漏检。
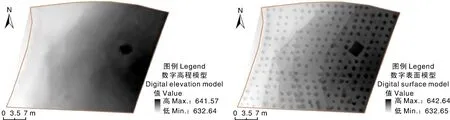
图6 数字高程模型(A)与数字表面模型(B)Fig.6 Digital elevation model (A) and digital surface model (B)
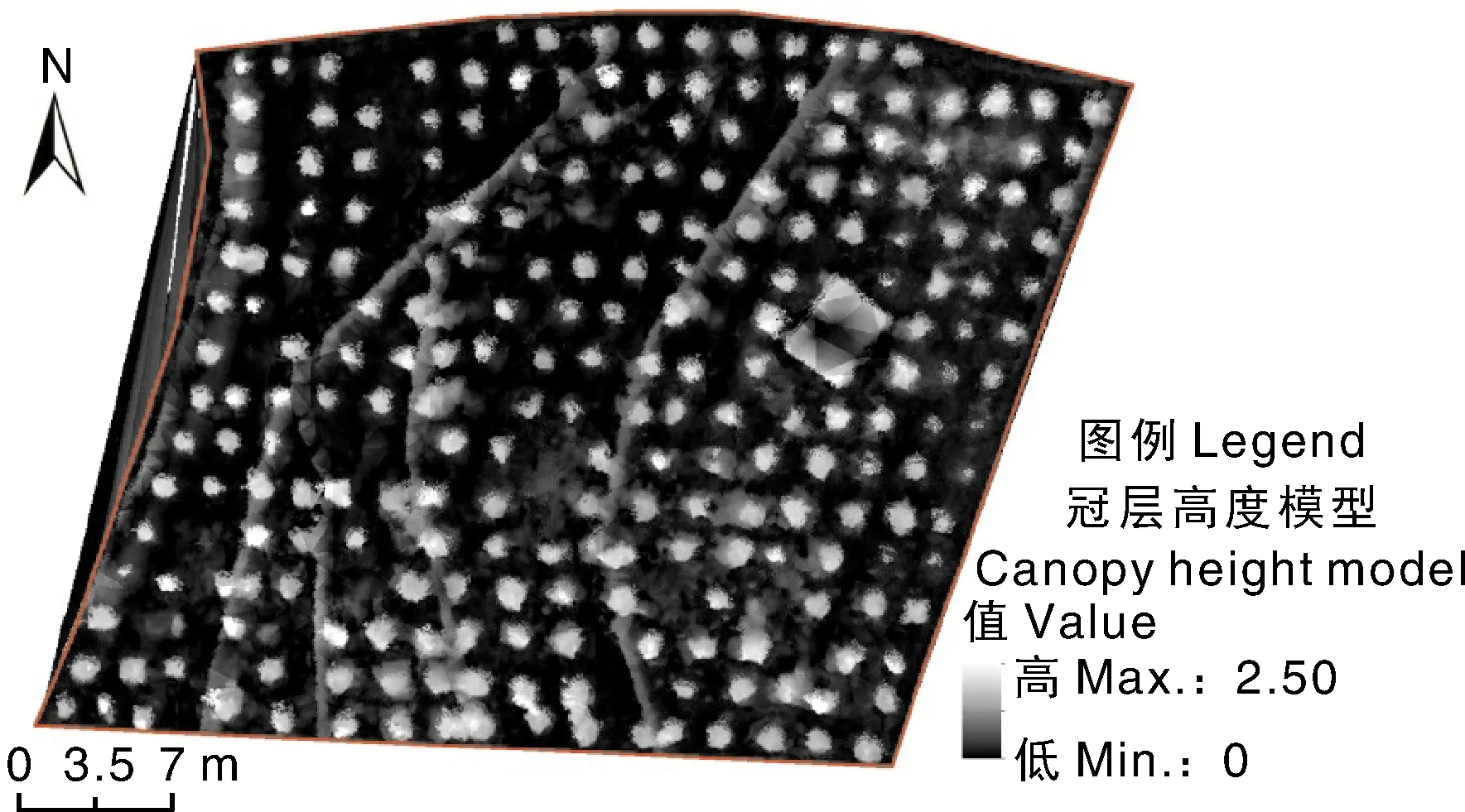
图7 火龙果冠层高度模型Fig.7 Pitaya canopy height model

图8 火龙果株数提取结果Fig.8 Extraction results of plant number of pitaya
通过以上规则,对提取的火龙果株数进行统计分析,运用无人机影像匹配的点云数据进行火龙果株数提取,具有较高的精度,其提取株数为250株,正检234株,错检16株,漏检4株。实验样地的监测率、正确率及总体精度分别为98.32%、93.60%和95.90%,精度均在93%以上,漏提率仅为1.68%。但是植株的错提率较高,为6.4%,如图9-b所示。
2.2.2 基于CHM的火龙果冠层提取
运用CHM进行植被冠层提取,由于CHM是DEM与DSM的差值,其包含了植被的高程信息,通过对CHM数据进行重分类处理,结合野外田间调查的数据,设置冠层高度区间,剔除非植被冠层的点。再运用ArcMap对矢量文件中小碎斑进行处理,最后得到植被冠层如图10所示。
对结果进行分析,发现部分存在漏检和连株现象。漏检株数为14株,连株的有5对,共包含10株,均视为错提取。漏检主要是受梯坎的影响,火龙果靠近梯坎且其冠层高度与梯坎高度近似,进而被剔除(图10-a)。而连株则是由于火龙果间距过小,冠层交织所致(图10-b)。根据对株数统计得到,提取株数为224株,正确提取214株,其总体精度为90.68%,但监测率较低,为89.92%,相比于种子点的提取方法,其漏提率较高,为10.08%,错提率相对较高,为8.55%。
2.3 方法验证
2.3.1 基于CHM的火龙果种子点提取
为了进一步探讨以上结论是否合理,为了排除其他因素对火龙果提取的影响,本研究选取了同一时期拍摄的一块面积2 154 m2的火龙果地为验证样地。通过提取发现,出现错检和漏检的较多(图11)。其原因与实验样地相似,如图12所示,错误提取主要受到地形、梯坎、水泥柱的影响,使得对冠层误判,导致错误提取。而漏检主要分为以下两个方面:(1)当两株火龙果种植间距过小,枝条相互交叉时,将会误判定一株火龙果,出现漏提现象;(2)火龙果植株过低或倒伏,无法提取火龙果冠层,出现漏提取。

图9 火龙果株数提取结果分类Fig.9 Classification of pitaya plant extraction results
通过对提取的火龙果株数统计,发现在该样地中提取火龙果株数的精度仍然较高,正确提取株数为315株,错提株数为25株,漏提株数为27株。其监测率、正确率及总体精度分别为92.11%、92.65%和92.38%,均超过了92%。但错提率为7.35%,漏提率为7.89%。相比于实验样地中的精度来看,其错提率高出0.95%,漏提率高出6.21%。

图12 火龙果冠层高度模型Fig.12 Pitaya canopy height model
2.3.2 基于CHM的火龙果冠层提取
运用CHM进行火龙果冠层提取,发现在该样地中由于受到地形和梯坎的影响如图13-a所示,存在错分的现象。通过观察发现,错分梯坎为长条形,火龙果冠层则接近圆形,可运用形状系数对其进行分离。该系数通常运用在小流域形状的划分,形状系数Ke是周长与同面积圆的周长之比。提取的形状与圆的形状相差越大,系数Ke的值也越大。Ke的值越接近于1时,形状越接近于圆形;值越大,流域形状越狭长[26]。
(5)
式(5)中:Ke为形状系数,L为周长,S为同面积圆的面积。
通过剔除部分错分图斑,最终基于CHM的火龙果冠层提取结果如图13-b所示。
据统计,运用CHM进行冠层提取的火龙果株数为314株,其总体精度为90.92%。但样地的提取株数小于目视解译数,漏检42株,监测率较低,为87.72%,有近12.28%的火龙果未被监测到。正检300株,错检14株,其中有4对连株,共8株,正确率为95.54%。

图13 火龙果冠层提取Fig.13 Canopy extraction of pitaya
通过以上验证来看,运用CHM从2个方面进行火龙果株数的提取,基于CHM的火龙果种子点提取,其监测率和总体精度均高于基于CHM的火龙果冠层提取,但两者的提取总体精度均在90%以上。由此一方面说明2种方法均具有较高的可行性,另一方面说明运用机载激光雷达单木识别方法对火龙果进行株数的提取是可行的。
3 结论
本研究利用多旋翼无人机灵活快速、经济成本低的特点,快速获取影像匹配点云数据,选择两块类型不同的样地进行提取与验证,运用单木提取的分割方法对喀斯特高原峡谷复杂地形区火龙果株数进行提取。从原始点云的去噪、填补点云“空洞”、DEM和DSM拟合,以及CHM的生成,始终保持其分辨率的统一。从其提取的结果来看,基于点云数据的火龙果株数提取具有较高的精度。主要结论如下:
(1)由于火龙果的点云数据与树木的点云数据的空间分布形态类型,采用激光点云提取单木的方法来提取火龙果株数,精度较高;(2)实现了地表较复杂区域火龙果植株的提取,说明该方法在喀斯特山区具有可行性;(3)运用种子点进行火龙果株数提取的精度为92.38%,运用植被冠层进行火龙果株数提取的精度为90.68%;(4)受梯坎等人为基础设施或与其冠层高度接近地物的影响,相近高度的地物使得由点云生成的DEM和DSM存在一点的误差,进而导致地物的错分,错提率最高为8.55%,漏提率最高为12.28%;(5)基于可见光影像匹配点云数据进行作物提取,运用冠层高度模型,在一定程度上可以消除植株下方杂草和土壤对提取的影响,可以和基于颜色指数的提取方法互为补充。
本研究方法存在一定缺陷:一方面,本文研究选择区域相对较小,针对火龙果植株提取,有待进一步选择多个测试区和扩大测试面积;另一方面,冠层高度模型主要依赖于点云携带的高程信息,当样地内的基础设施或存在的地物与火龙果冠层接近时,将会出现错检和漏检。在下一步的研究中,将会结合无人机光谱数据和点云数据的几何信息开展喀斯特复杂地形区的特色经济农作物的精准识别研究。