基于区域生长的PCNN自动目标分割算法
2020-06-23田志宏李瑶瑶赵昱炜宁培英
田志宏,田 硕,李瑶瑶,赵昱炜,宁培英,于 扬
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 荣耀智慧(天津)工程设计有限公司,天津 300070)
智能化发展使得各式各样智能机器人广泛应用于工业、教育、医疗等领域,服务于老人、残障人士的服务型智能机器人也不断在发展,载有机械臂的电动轮椅是服务型机器人的重要分支[1].
载有机械臂的电动轮椅可以在日常生活中完成如开门、倒水等一些基本动作,可以为老人以及残疾人服务,以提高他们的生活灵活性,所以对此类轮椅的研究具有一定的社会和现实意义[2-3].在电动轮椅机械臂抓取目标的过程中,通过图像分割实现目标定位.定位的准确性与图像分割好坏紧密相关,也是后续准确求解轮椅与目标物间距离参数的基础.因此,本文对图像分割部分进行了进一步研究,旨在通过图像分割算法,实现对目标物的准确分割,进而可以准确获取目标物的位置坐标,以实现目标物定位.
在数字图像处理方面,传统彩色图像采用的是RGB(红、绿、蓝色)色彩模式,但RGB色彩模式各个通道间的冗余信息较多,亮度一旦改变,R、G、B这 3个分量都会改变,没有稳定的描述规则;且一些目标物与背景的 RGB颜色差异不明显,不利于描述二者的颜色模型,对图像分割有一定困难.HSI(色调、饱和度、强度)颜色空间则更符合人视觉系统的感知彩色模式,其中H和S分量与人感受的方式紧密结合,很容易从中提取色彩信息,并且 H和 S分量结合进行图像分割,有利于目标物与背景的分离,所以采用HSI颜色空间的H和S分量进行彩色特性分析[4].
数字图像处理的重要内容之一是图像分割技术,图像处理的好坏会直接影响到后续的定位过程.目前,图像分割技术多种多样,常用分割方法有:基于阈值分割,例如基于直方图阈值分割、Otsu阈值分割;基于聚类的分割,例如K-均值聚类、模糊C均值分类,虽然聚类分割缺乏对噪声等的鲁棒性,但通过研究者不断地改进,使得分割精度不断提高;基于特定理论分割方法,例如遗传算法、人工神经网络算法等.以上方法都能很好地对目标物进行分割[5-7].脉冲耦合神经网络(pulse couple neural networks,PCNN)模型为仿动物视觉系统建立的模型,也逐渐成为机器视觉领域的热门课题之一.
PCNN算法对图像分割效果显著,一些作者也对其进行一定改进[8-10],例如简化 PCNN 算法,或者与其他算法结合,例如与遗传算法相结合,实现对PCNN参数的确定等.以电动轮椅作为移动平台,机械臂所抓取的目标物并非在相同位置,目标物受到的光照强度会有所不同,而光线因素会对图像分割产生影响.因此在本文中,考虑光线条件对分割的影响以及目标抓取中遇到的多个目标物选其一的情况,提出区域生长算法与 PCNN算法相结合的图像分割方法.在 HSI颜色空间,以 H和 S分量作为区域生长算法的生长准则,将相似像素生长为同一区域,采用信息熵算法控制 PCNN算法的迭代次数,最终实现图像分割.
1 PCNN模型及图像分割原理
1.1 PCNN模型
Eckhorn等提出的单个PCNN神经元模型,如图1所示,该模型包括3部分:输入区、连接输入区以及脉冲发生器[11-12].
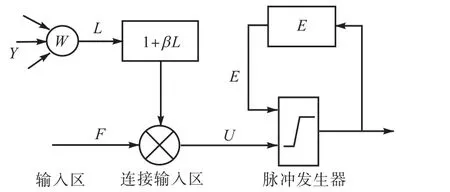
图1 PCNN模型Fig. 1 PCNN model
PCNN模型的离散数学迭代方程见式(1)—式(6)[13].
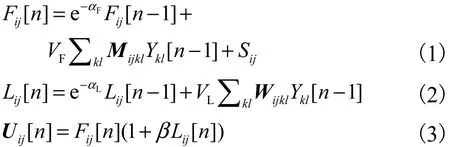
式中:n代表迭代次数;αF和VF分别为反馈输入域的衰减时间常数和放大系数;Sij为数字图像中的像素灰度值,是神经元的外部刺激;αL和 VL分别为耦合连接域的衰减时间常数和放大系数;β是内部活动项的连接系数;Mijkl和 Wijkl分别为反馈输入域和耦合连接域的权值矩阵,用欧几里得公式表示;Eij为脉冲发生器的组成部分;VT为阈值的放大系数,可以使脉冲的高电平迅速降为低电平.
1.2 PCNN图像分割原理
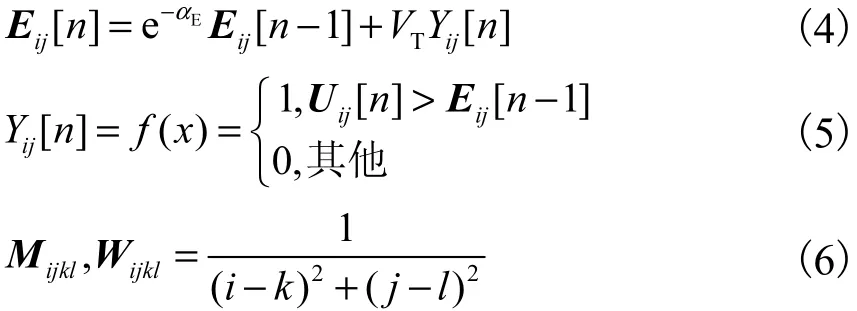
在 PCNN数字图像处理模型中,神经元与像素为一一对应关系.该模型具有周期性点火的特性,在无耦合的情况下,像素值与点火周期关系如图2所示.
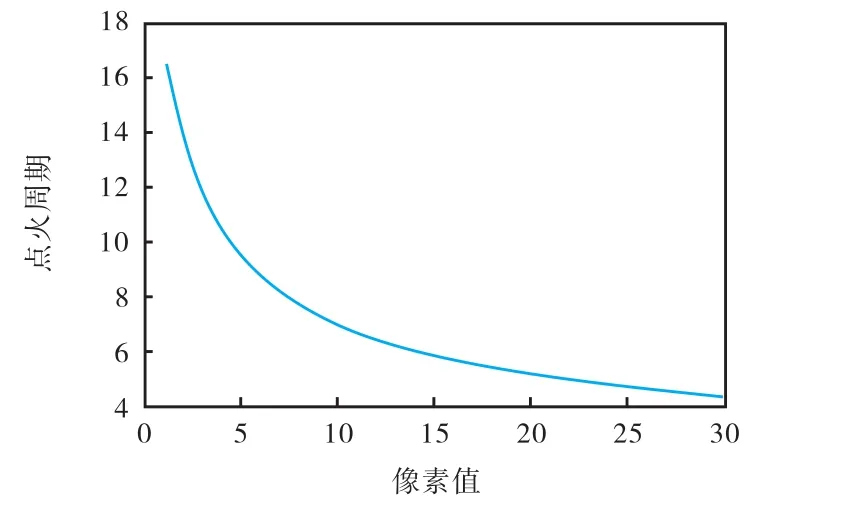
图2 点火周期与像素值关系Fig. 2 Relationship between ignition period and pixel value
由图 2可知,在无耦合情况下,像素值越大,越先点火.因PCNN具有耦合关系,像素Sij和Skl(其中Sij大于Skl)具有如下关系:

1.3 信息熵
熵作为图像统计特性的一种表现形式,反映的是图像信息量的大小.在每次PCNN循环迭代后,计算输出的二值图像 []Y n的信息量,即熵值,见式(8)[14].

式中:P1、P0分别是 Y [ n]为 1、0的概率.熵值越大,说明包含的原图信息量越大,所以将求得的熵值最大为 H1max(P)时的迭代次数作为PCNN循环迭代次数,即 PCNN每迭代一次计算熵值 H1( P),当 H1( P)的值下降时停止迭代,此时输出的 Y[ n]二值图像所包含的信息量最大,即为最佳输出图像.
2 HSI颜色空间变换
RGB图像各通道间冗余信息复杂,难以控制,而HSI空间更符合人的视觉特性.将 RGB空间转换到HSI,首先将R、G、B归一化,即R,G,B[0,1]∈,则转化公式为
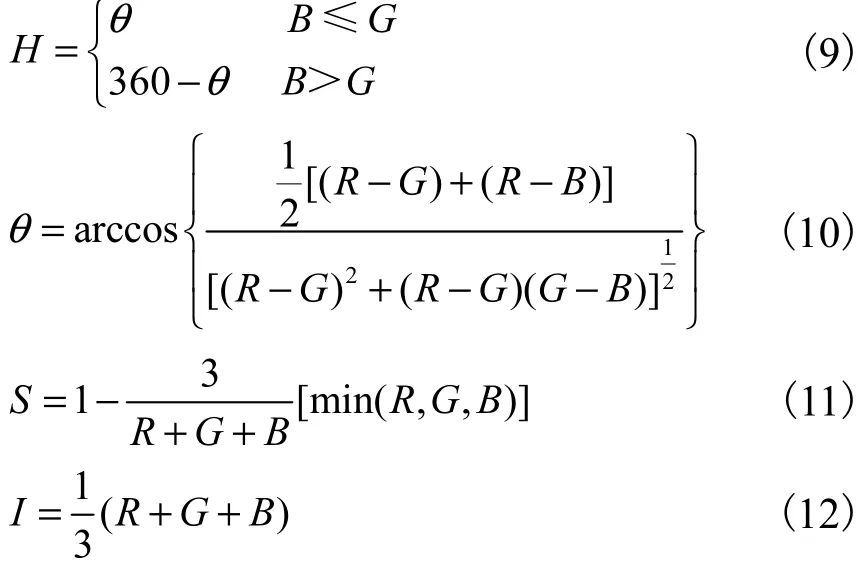
其中色调 H的取值范围为 0°~360°,饱和度 S、亮度I取值范围[0,1].HSI颜色空间模型如图3所示[15].

图3 HSI颜色空间模型Fig. 3 HSI color space model
色调(H)分量描述的是一种纯色的颜色属相(如红色、黄色、绿色),饱和度(S)分量是一种纯色被白光稀释的程度,即颜色的浓淡程度,亮度(I)分量描述颜色的亮暗程度,中心轴代表着图像的灰度图.
3 区域生长原理
物体因自身表面受到的光照强度不同,导致传统PCNN算法无法实现物体的正确分割,其参数对同步点火的像素值范围难以控制,而区域生长方法是根据像素的相似性质,将同一目标物体区域内的像素进行聚集的方法.结合生长区域算法,可以避免该现象产生.
区域生长是指从某个选定的像素出发,根据某种准则,逐步加入邻近像素,满足一定条件,就停止区域生长[16].其主要步骤为:以选取的一个小邻域或单个像素作为生长种子点.从该种子点开始,将相邻的或其他区域像素,根据事先规定好的生长准则进行判别,符合准则的像素归入该种子点区域.
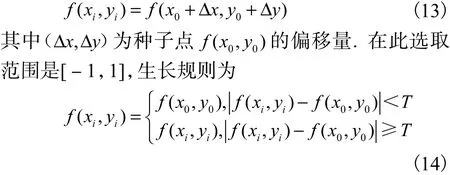
图4为区域生长算法的过程图.
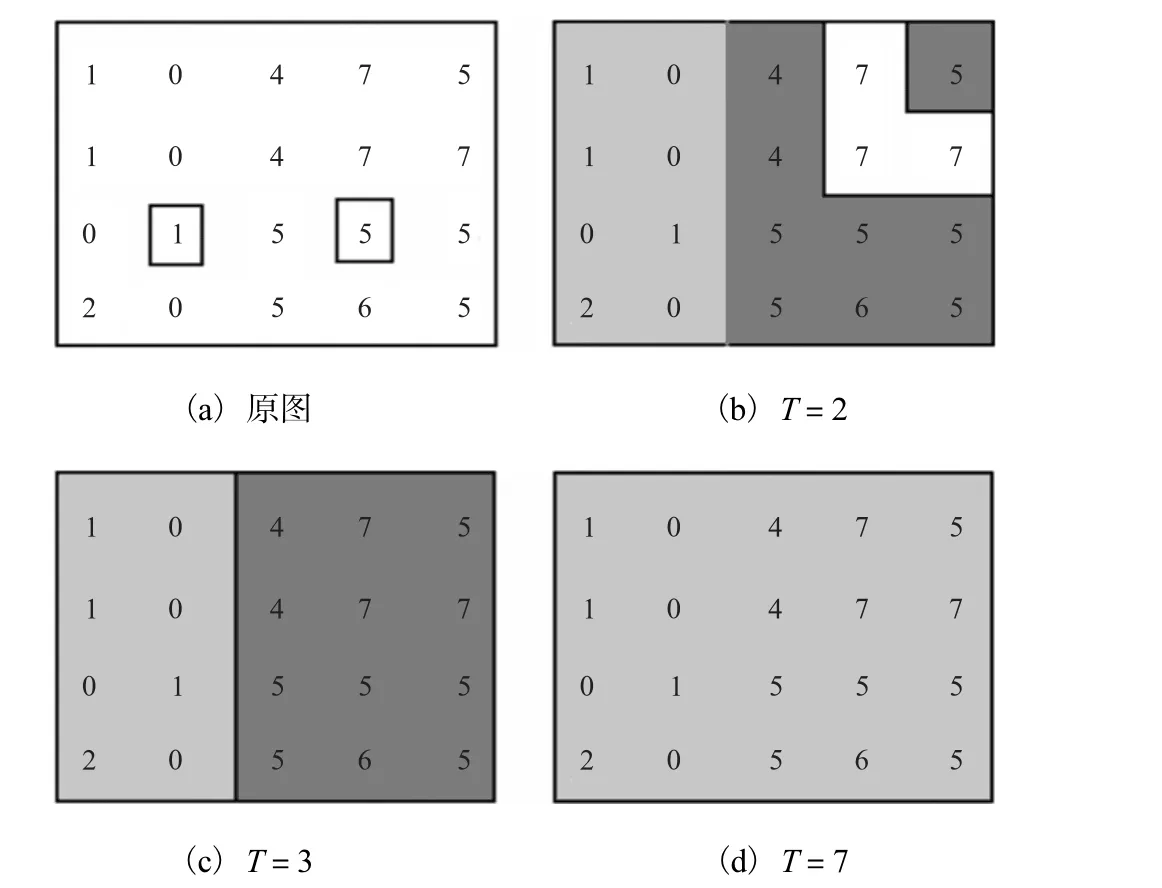
图4 不同门限值T下的生长区域(已知种子点)Fig. 4 Growth region with different T value
图 4(a)为选择的种子点(已在原图中标出),假设其生长准则为:以所考虑区域的像素灰度值与种子像素的灰度值的差值的绝对值作为门限值,小于门限值T,则所考虑像素与种子像素为同一区域.图4(b、c、d)分别为门限值 T为 2、3、7时的生长结果图.在区域生长算法中,关键在于生长准则的选择以及种子点的选取[17].本文采用半交互式方法确定种子点和生长准则.
4 分割方法
针对本文提出的基于区域生长的 PCNN图像分割算法,对其进行方法描述:
(1) 首先选择目标物,即ROI区域.
(2) 将 ROI区域的 RGB空间模型转换为 HSI颜色空间模型.
(3) 对 ROI区域执行区域生长算法.种子点选择方法为计算 ROI区域灰度直方图,像素数最大所对应的像素值即为种子点像素值.生长准则确定方法:在目标物所在图像区域分别求 H和 S分量的最大值Simax和最小值Simin,并判断ROI区域内每个像素 S i(x,y)∈ROI的 H和 S分量是否在其对应的 [Simin,Simax]范围内,若在此范围内则令 S i(x,y)∈ROI等于种子点像素值,不满足则其值不变.
(4) 执行公式(1)—(6),获得点火矩阵 Yi,并根据公式(8)获得每次迭代的信息熵,信息熵减小时则停止迭代,即可获得分割结果.
(5) 根据分割结果获得目标物轮廓,并计算目标物在原图像中的形心坐标,即为目标物位置的像素坐标.
5 实验结果
为验证本文所提方法对目标物分割进而求得目标物像素位置坐标的有效性、准确性和实时性,并结合研究背景中目标物位置可以不固定,需要考虑目标物会受不同光线因素影响以及在多个同种目标物中只选择其中一个抓取的情况,设计如下实验:目标物处于不同光线环境、目标物具有一定反光特性、多个同种目标物只定位其中一个,并与 OTSU算法和传统PCNN分割方法进行实验对比.
通过实验获得的图 5—图 8的 PCNN参数见表 1.
β和 VL相结合,可以控制 PCNN同时点火的像素值范围,VT决定了高电平到低电平的快慢,这几个参数对图像分割起主要作用.结合其他研究者对参数的确定以及获得的实验效果,最终确定表1中的参数值.
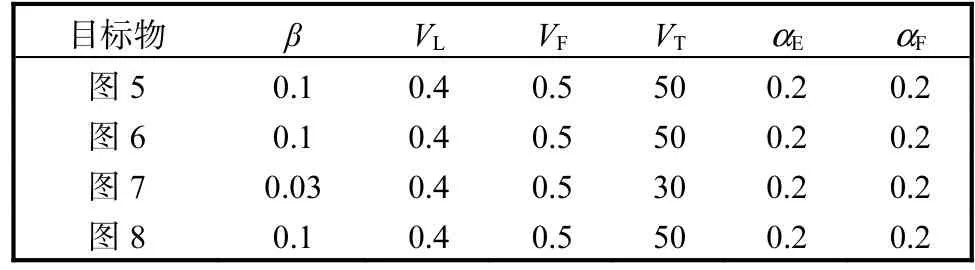
表1 PCNN参数Tab. 1 PCNN parameters
图5、图6分别为某一目标物在不同光亮条件下的分割结果.

图5 光线较暗条件实验结果图Fig. 5 Experimental results under dark light condition
图 5为在光线较暗条件下测试的结果.其中图5(c)实现的生长准则为:满足 H 值在[80,123]内,且S值在[0.34,1]范围内的像素生长为同一区域. PCNN算法通过信息熵控制其迭代次数为15次.对图5(b、c、d)进行对比,可看出传统 PCNN 方法因目标物表面受到的光照强度不同而导致其无法正确分割,而本文方法实现的分割效果比传统 PCNN方法准确,较完善地保留了目标物信息.因目标物与背景间的最大类间方差值较小,导致 OTSU算法未能将目标物与背景准确分离.
图 6为与图 5同一目标物在光线较亮条件下的测试结果,其中图 6(c)的生长准则为:H 值在[63,85]区域内,S值在[0.3,1]区域内的像素生长为同一区域,且PCNN迭代次数为13次.由图6可见,本文分割方法大大改善了传统 PCNN算法与 OTSU算法分割目标物不完整的缺陷,可以相对完整分割目标物.
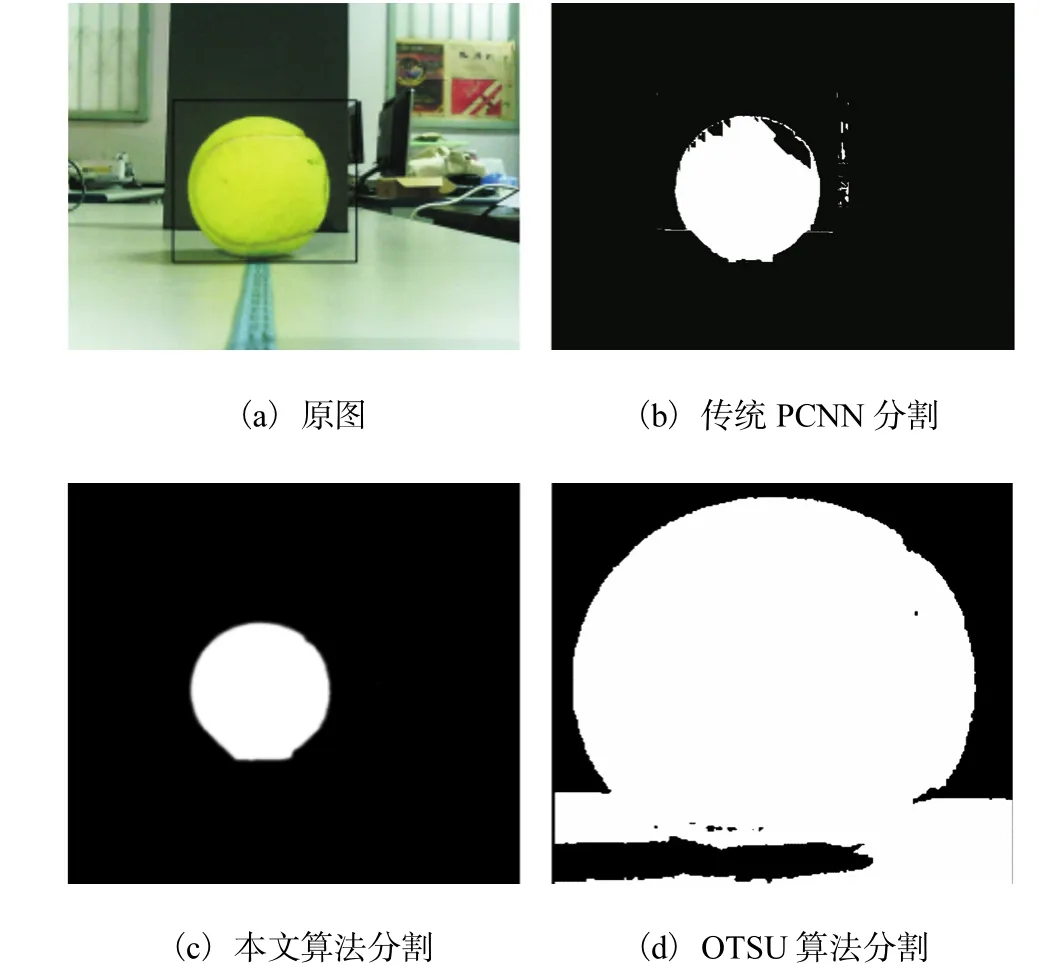
图6 光线较亮条件实验结果图Fig. 6 Experimental results under brighter condition
为进一步验证本文算法的有效性,对一个具有反光特性,并有一定强光照射的目标物进行测试.图 7为在该实验条件下的测试结果图.
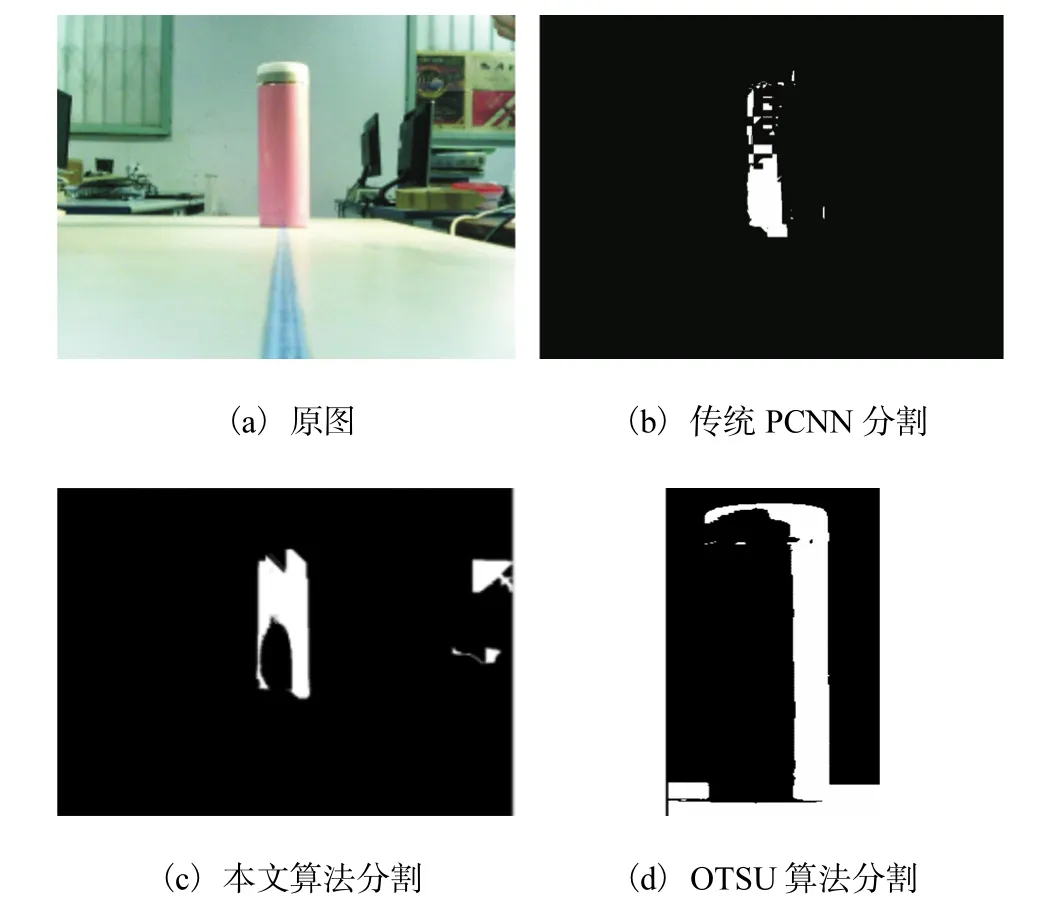
图7 强光条件下实验结果图Fig. 7 Experimental results under strong light condition
其中图7(c)以H值在[6,50]内,且S值在[0.01,0.5]内作为区域生长准则,将满足条件的像素生长为同一区域,迭代 15次得到的分割结果.从图中可看出,因强光照射再伴随目标物具有反光特性,目标物像素值受到严重干扰,传统 PCNN算法和 OTSU算法对该目标物分割的轮廓边缘严重损坏.而通过本文方法实现的分割,虽未能准确分割,但基本保留其边缘信息.
考虑在多个相同目标物中选择其一实现抓取的情况,对该条件进行实验,结果如图8所示.

图8 多目标物条件下实验结果Fig. 8 Experimental results under multi-target condition
由图 8可以看出,传统 PCNN算法分割图像得到的边缘信息不完善,OTSU算法产生干扰信息较多,而本文方法对目标物分割效果相对较好,虽然有无关信息存在,但获取轮廓时,本文算法会对轮廓进行选择性筛选,所以最终可以获得目标物位置信息.图 8(c)的生长准则为:H和 S分量满足H∈[351.455,362.8],S∈[0.37,0.5]的像素生长为同一区域,且PCNN迭代次数为13次.
图 9为本文算法对图 5—图 8中目标物进行实验最终获得的轮廓图.

图9 本文方法获得目标物轮廓图Fig. 9 Contour of target obtained with the new algorithm
本文在不同光照条件下,并与传统 PCNN算法和 OTSU算法进行对比实验,可知本文分割方法可以改善因光线原因造成的图像分割不完善的现象,且可以将目标物与背景很好地分离,具有一定鲁棒性,也能满足多目标物而只选其一的需求.
结合表 1参数可知,PCNN参数虽很多,但将区域生长算法与 PCNN算法相结合,对于不同的实验以及目标物,参数改变范围较小,在一定程度上可以减轻对参数值确定的工作量.
通过分割获得目标物轮廓,进而可求得目标物位置信息.为进一步验证本方法获得目标物位置像素坐标的准确性以及实时性,将本文算法获得坐标结果与实际坐标进行比较,结果见表2.
结果证明该算法通过图像分割最终求得目标物位置的像素坐标的准确率可达到 98%.此外,通过CPU为3.10GHz的PC机,仅对ROI区域实现图像处理,减少对无关信息处理而消耗的时间,因而最终获得坐标的平均时间为 1.61s,实验证明,该算法对目标物位置坐标的获取具有一定实时性.
6 结 语
光线因素会对图像分割产生影响,进而影响对目标物位置坐标的获得,针对此问题,本文提出了一种基于生长区域的 PCNN目标定位算法.该方法以 H和S分量作为生长准则的门限值,将符合条件的区域划分为同一区域,结合 PCNN算法以及最大信息熵准则,实现了对目标物的自动分割,同时获取了目标物轮廓和目标物的形心像素坐标点.通过对不同光线条件下的目标物,以及多目标物选其一情况进行实验,可知此方法获得像素系位置坐标约需 1.61s,具有较高实时性.同时相对于传统 PCNN方法和OTSU方法,该方法分割效果更准确,且对目标物位置的获取,准确率达到 98%,可以实现对目标物的分割与定位,进而为后续机械臂在电动轮椅移动平台控制下实现目标物的自动抓取.
