一种位置补偿算法在伺服跟踪系统中的应用
2020-06-23刘铸华
王 鑫,刘铸华
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
在电子战系统中,辐射源跟踪是一个重要环节,而伺服跟踪系统则是完成该环节的核心。随着作战对象机动速度越来越高、机动轨迹越来越多变,对伺服跟踪系统的跟踪速度和跟踪加速度提出了更高的指标要求;同时,受限于电子战系统的波束宽度指标,对伺服跟踪系统的跟踪精度也有了更高的要求。常规的应用场合下,比例积分微分(PID)算法和电流、速度、位置三环结构的结合,能一定程度上满足伺服跟踪系统对跟踪准确性和快速性的要求[1- 2]。但是在某些遥控应用场合,网络延迟会导致伺服跟踪误差加大,尤其是针对机动速度快、速度变化率高的目标,伺服跟踪误差会急剧增加[3],甚至超过自身跟踪波束宽度进而造成“跟丢”。
针对网络延迟造成的伺服跟踪系统跟踪精度下降的问题,鉴于系统程序固化、PID 参数不便于动态调整情况[4],本文采用位置补偿算法。根据实际网络延迟情况对遥控指令集进行外推,进而在保证伺服跟踪系统固有的快速性和准确性前提下,提升了系统的动态跟踪精度。
为了验证算法的有效性,本文采用飞行体模拟轨迹,在大网络延迟的环境中,对已有的伺服跟踪系统进行半实物验证,通过对比位置补偿算法处理前后的系统跟踪误差曲线,可发现位置补偿算法提升了伺服跟踪精度,能够满足伺服跟踪系统的使用需求。
1 伺服跟踪误差分析
在有网络延迟的遥控应用场景,伺服跟踪系统的指令-状态链如图1所示。

图1 伺服跟踪系统指令-状态链示意图
由图1可见,遥控应用场景下的伺服跟踪系统中,影响伺服跟踪精度的因素包含以下各项:
(1)上位机指令通过无线网络到通信接收设备的传输延迟t1;
(2)上位机指令通过通信设备,路经对下接口机到达伺服跟踪系统的指令延迟t2和t3;
(3)伺服跟踪系统在采用PID 算法和电流、速度、位置三环结构的情况下,系统固有的跟踪误差指标θ1;
(4)伺服跟踪实时状态传递到对上接口机及通信设备的网络延迟t4和t5;
(5)伺服跟踪实时状态由通信设备无线传输到上位机的网络延迟t1。
由于伺服跟踪系统和上位机之间的状态显示同步,可以依靠时统来实现误差消除,因此本文重点考虑(1)、(2)、(3)三项误差影响因素。
飞行体的飞行轨迹是一个随时间变化的时变函数,可以表示为s(t)。而伺服跟踪系统的跟踪曲线也是一个与时间、飞行体飞行轨迹有关的时变函数a(t),可以表示为:

式中:g(t)表示伺服跟踪系统的响应函数。
在采用了PID 算法和电流、速度、位置三环结构的伺服跟踪系统中,系统跟踪误差可以表征为同一时刻下伺服编码器反馈值与当前飞行体位置所决定的伺服指令值之间的绝对差e(t),即:

而伺服跟踪误差指标θ1可以表示为:

在考虑上述误差影响因素(1)、(2)的情况下,当前时刻下伺服跟踪曲线a(t)的输入应该是带上网络延迟量后的输入,因此在带网络延迟的应用环境下,伺服编码器反馈值可以表征为:

此时的伺服跟踪误差是:

此时系统的跟踪精度为:


由式(6)可见,在有网络延迟的遥控应用场景下,伺服跟踪系统的跟踪精度与系统固有指标能力θ1和飞行体自身的飞行角度变化率有关。当飞行体的角变化率较大时,伺服跟踪系统的跟踪精度对指令网络延迟极为敏感[5]。
2 位置补偿算法
在有线控制传输的应用环境下,系统的指令网络延迟不大,θ1主要由系统固有的跟踪误差指标决定。由于执行动作相对于指令的滞后,θ1指标的提升主要依靠位置-速度-电流三环前馈的方式,进行系统能力优化。前馈控制系统原理如图2所示。
图2所示的位置-速度-电流三环控制系统,通过采用速度前馈补偿,在加快伺服系统的速度响应同时,也减少了位置环对位置误差的积分积累,从而改善因伺服动作滞后而引起的跟踪精度下降。

图2 伺服跟踪系统前馈补偿系统示意图
在采用速度前馈补偿算法以获取伺服系统固有的高跟踪精度θ1的前提下,本文主要分析因指令系统延迟造成的跟踪误差提升问题。
根据式(6),要降低系统的跟踪误差,则需要降低s(t-t1-t2)-s(t),鉴于飞行体轨迹不可预知,因此可以通过对伺服跟踪系统接收到的s(t-t1-t2)进行位置补偿,进而消除t1+t2延迟所带来的跟踪误差影响。
由于数据率限制,传递到伺服跟踪系统的目标位置函数s(t)是一个离散函数[6],所以可以把接收到的目标位置指令表示为u(k)=s(t-t1-t2),k=0、1、2、3…。网络传输延迟时间t1+t2可以表示为Δ。位置补偿算法的输入为u(k)和延迟时间Δ,输出表示为u︿(k+Δ)。当前时刻飞行体的真实位置是s(t),经离散化后同样可以表示为u(k+Δ)。故此,位置补偿算法可以表示为:

将式(7)表示为输入u(k)和延迟时间Δ的表达形式:

式中:g(Δ)表示位置补偿量,根据公式(8),有:

根据实际作用对象,可以对飞行体飞行轨迹进行最小二乘拟合,即:

上式可以通过历史轨迹点u(k)、u(k-1)、u(k-2)进行实时求解。通过式(8)、(9)、(10),可得到:

由式(11),位置补偿后的目标位置指令由历史轨迹点u(k)、u(k-1)、u(k-2)、网络延迟Δ计算得到。其中Δ可通过时统计算:Δ=伺服系统接收指令时刻-指令上时标。
3 仿真验证
针对位置补偿算法,采用现有一套高精度伺服跟踪系统进行算法验证,在采用了速度前馈设计的前提下,伺服跟踪系统的固有动态跟踪精度指标为0.5°。飞行体轨迹为虚拟飞行轨迹,时长20 s,最大角变化率为2.5°/s,最大角加速度变化率为5°/s2。虚拟通信设备延迟量500 ms,时统精度1 ms,指令传输频率10 Hz,状态反馈频率1 Hz。半实物仿真架构如图3所示。
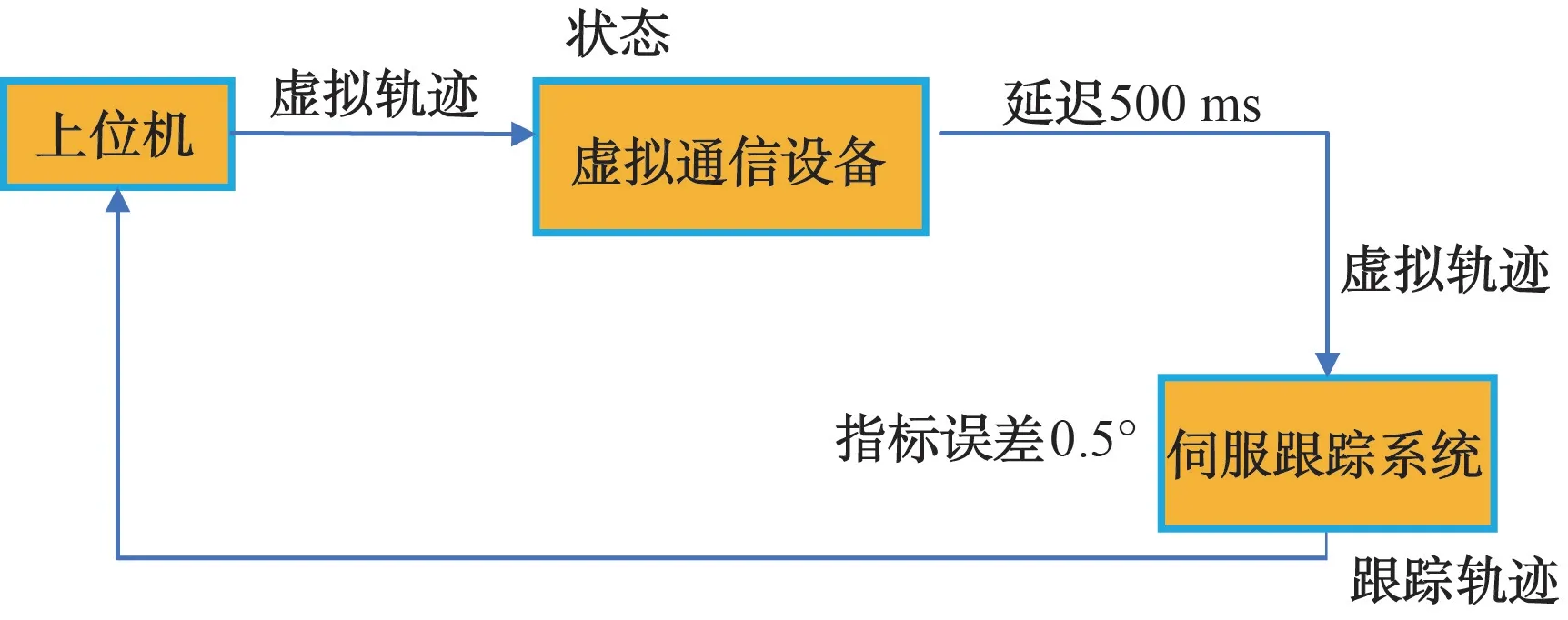
图3 位置补偿算法半实物仿真验证示意图
图4分别是使用位置补偿算法前后,伺服跟踪系统跟踪曲线与飞行体理论飞行轨迹的对比图。

图4 算法补偿前后伺服跟踪曲线与理论飞行曲线对比图
从图4可见,位置算法补偿前,实际指向和理论指向的最大偏差值表征了伺服跟踪精度,其精度为1.34°,这与常规采用速度前馈设计的伺服跟踪指标1°相差较大,主要原因是指令传输延时过大,已经较大地影响了伺服跟踪系统的精度指标。在采用位置算法补偿后,伺服跟踪系统实际指向与理论指向的最大偏差值为0.45°,与伺服跟踪系统固有的0.5°跟踪精度指标一致。
4 结束语
本文对有指令延迟条件下伺服跟踪精度的误差影响因素进行了分析,理论分析结果表明,该条件下伺服跟踪精度只跟网络延迟时间、伺服跟踪系统固有跟踪精度指标有关,进而提出了针对控制指令的位置补偿算法。半实物仿真结果表明,该算法对网络延迟环境下的伺服跟踪系统具有明显的跟踪精度提升作用,能够满足一定条件下的伺服跟踪使用需求。