基于ARIMA 模型的未知观测噪声协方差矩阵的卡尔曼滤波技术
2020-06-23邢思远徐国亮
邢思远,张 逊,徐国亮
(江苏自动化研究所,江苏 连云港222061)
0 引 言
雷达量测数据可以看作是1组有序、随机的时间序列数据[1],此数据实际是由目标真值和量测误差综合组成。对该量测时间序列的一种处理方法是时间序列分析法。这种方法通过序列自身建立可以直观体现出观测数据序列与噪声序列之间关系的模型,再进一步利用此模型进行分析和研究[2-3]。在某些工程中,存在着无法精确获得观测噪声矩阵的情况,而根据经验选取的观测噪声矩阵值的准确性将直接影响到标准卡尔曼滤波方法的性能,最严重的后果就是状态估计发散而彻底无法工作[4],这种情况下研究未知观测噪声协方差矩阵的卡尔曼滤波方法是很有必要的。本文主要工作就是解决这一问题。通过构建时间序列模型,在此基础上推导未知观测噪声协方差矩阵的递推式,并用于标准卡尔曼滤波中进行状态滤波。经过建模仿真实验验证,取得了良好的效果。
1 建立时间序列模型
t时刻的序列可以通过公式表示为:

式中:φi(i=1,2,…,p)为自回归(AR)参数;p为AR 的阶数;θj(j=1,2,…,q)为滑动平均参数,q为MA 的阶数;{a t}之一序列为白噪声序列。
式(1)称为{x t}的自回归滑动平均模型[5],记为ARMA(p,q)模型。
ARMA 模型处理的数据要求是平稳的,但在实际的雷达测量中,数据通常是非平稳的。处理方法是通过数据差分除去序列中的趋势项,直到序列平稳为止。对于该处理后的平稳数据先进行ARMA建模[6],再根据差分的次数计算出差分算子,最后反向得到原始序列的时间序列模型,即自回归和滑动平均(ARIMA)模型。
所以,对于非平稳时间序列模型,ARIMA 模型可表示为:

其中:

式中:p、q意义与式(1)中相同;d为差分阶数;L为后移算子,满足Lx k=x k-1。
与式(1)相比,式(2)包含d阶差分算子∇d=(1-L)d,在处理非平稳数据时,通过将d阶差分算子作用于原始序列{x t},获得平稳的时间序列{x′t}。通过对平稳时间序列建立ARMA(p,q)模型,可以得到原始非平稳时间序列的ARIMA(p,q,d)模型[7]。
对于{x′t}建立的ARMA 模型Φx′t=Θa t,通过令x t=∇d x′t,得到关于原始非平稳时间序列的ARIMA 模型Φx t=Θa t,即Φ∇d x′t=Θa t。至此,非平稳时间序列的处理过程可以分成3步:
(1)通过差分运算求得原始序列的差分后平稳序列,并得到差分阶数d;
(2)对处理后的平稳序列进行ARMA 建模,得到ARMA(p,q)模型;
(3)通过差分算子,求取原始序列的ARIMA模型,ARIMA(p,q,d)。
其中关键步骤是求取ARMA 模型,从过程x的N次观察中估计ARMA 模型需要3个步骤:
(1)确定ARMA 模型的类型,为AR、MA或ARMA 模型;
(2)阶数选择:确定模型阶数、参数数量;
(3)参数估计:确定模型的参数模型φi和θj。
具体建模流程如图1所示。
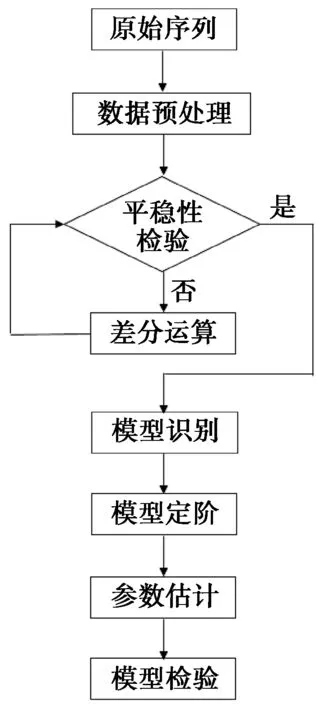
图1 建模流程框图
通过上述分析可知,原始序列是非平稳时间序列,数据预处理即是对数据的差分处理过程,直到满足平稳性检验。令序列{x′t}表示经过差分处理之后的平稳时间序列[2]。
平稳性检验中采用Daniel方法假设检验。做出如下假设:H0表示序列平稳,H1表示序列非平稳。取统计量如下:
当‖T‖≤tα/2(n-2)时,接受H0假设。若序列非平稳,则对该序列继续做差分运算。经过d阶差分后,得到平稳时间序列[8]。


即:

根据式(16)建立卡尔曼滤波模型,可以得到

本方法中观测噪声协方差矩阵的初始值取值条件是不能为零矩阵,同样地,取值越接近真实值滤波收敛的速度越快。本实验中,协方差矩阵取小值,通过图4的实验结果可以看到,经过约0.2 s的滤波震荡之后,开始收敛到真值附近。
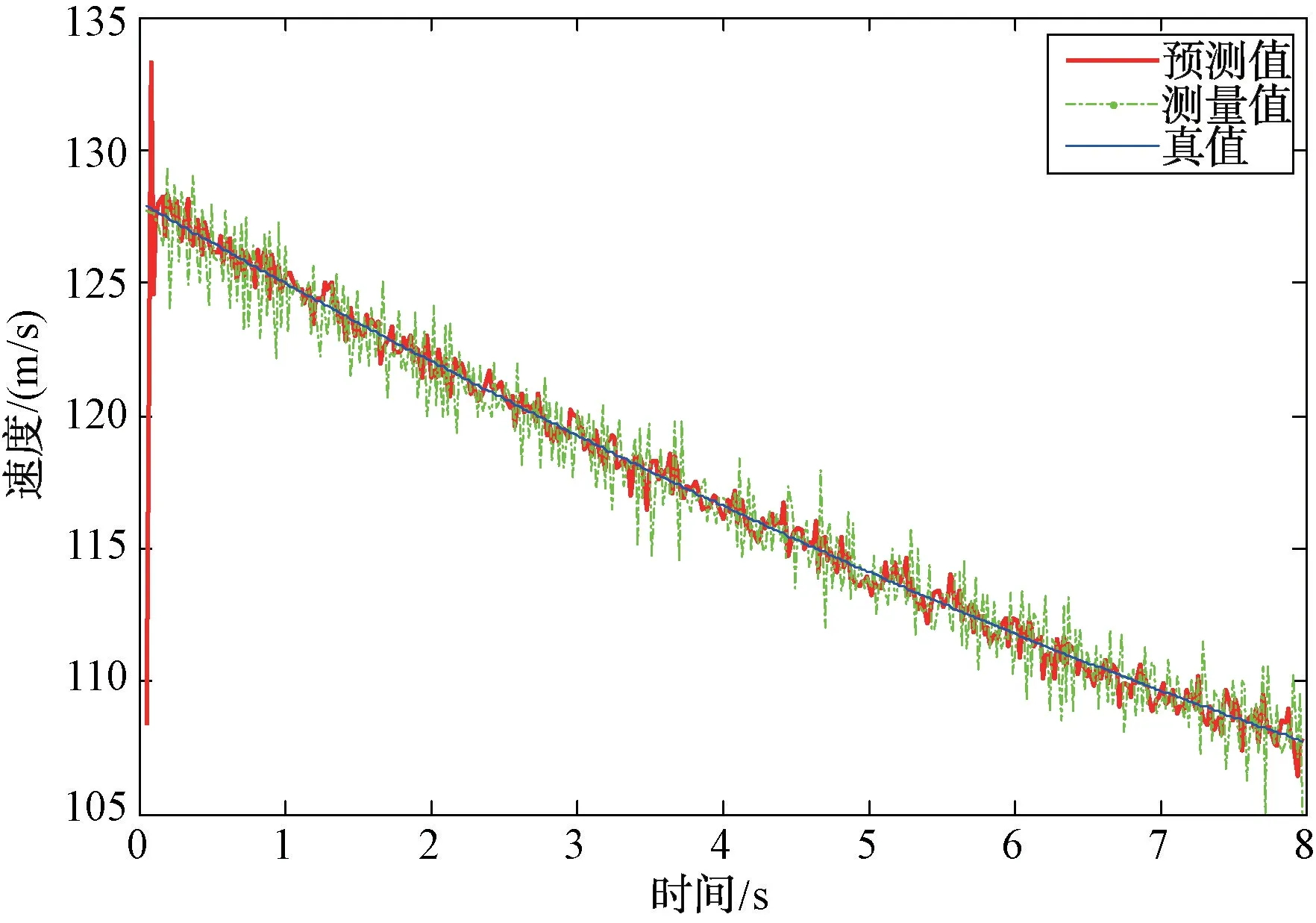
图4 测量值与预测值结果图
将该模型应用于仿真中剩余的数据,为查看方便,去除滤波未收敛部分,得到图5结果。
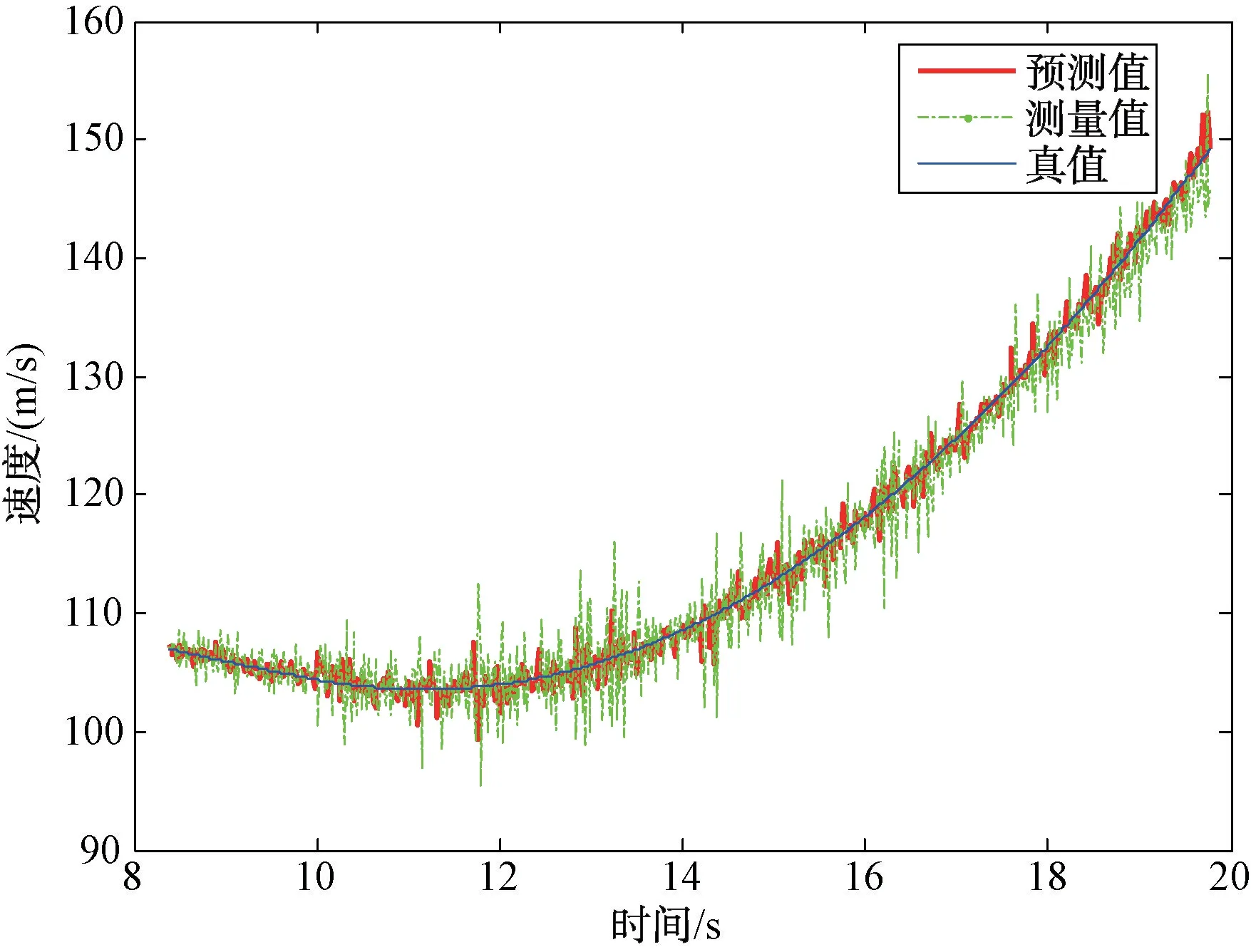
图5 剩余数据滤波结果
从图4与图5可以看出,经过此方法滤波之后的数据要比测量数据更接近真值,在真值附近小幅度震荡,随机误差得到了抑制。通过差分剔除趋势项后,求得滤波前后随机误差方差如表2所示。

表2 量测数据滤波前后随机误差方差统计(m/s)
从表2可以看出,对于前400点量测数据,量测值随机误差方差为1.432 4,经过建模、滤波之后降到了0.245 2,随机误差方差为原始的17.12%;余下数据通过建立的模型进行滤波之后,误差方差为原始数据的13.60%,误差得到了大的抑制。
4 结束语
本文首先通过平稳时间序列建立了ARIMA 时间序列模型,其次推导出观测噪声协方差的递推公式;然后将建立的时间序列模型应用于未知观测噪声协方差矩阵的标准卡尔曼滤波。利用前400点有限数据所设计的滤波器对所有数据进行随机误差滤波处理,滤波后的误差分别为原始数据的17.12%和14.60%。数据结果表明:本文提出的基于ARIMA 模型的未知观测噪声协方差矩阵的标准卡尔曼滤波能有效地抑制随机误差,可以有效地进行数据预测,具有实用意义,对未知观测噪声协方差矩阵的卡尔曼滤波有较大的应用价值。