基于暗通道先验与YOLO的水下河蟹识别研究
2020-06-22贺帆赵德安
贺帆 赵德安

摘 要:为解决全自动均匀投饵作业船在河蟹养殖过程中投饵不精准问题,引入水下摄像设备采集图像,但采集的图像存在对比度低、模糊和图像退化等问题。为此,采用暗通道先验提高图像对比度。利用YOLO卷积神经网络技术快速准确地识别出低照度环境下的河蟹,识别准确率达到98%,平均耗时50ms。获得河蟹生长、分布信息后测算出河蟹养殖密度,为全自动均匀投饵作业船精准投饲提供数据支持。
关键词:图像退化;暗通道先验;河蟹识别;卷积神经网络;YOLO
DOI:10. 11907/rjdk. 191919 开放科学(资源服务)标识码(OSID):
中图分类号:TP301文献标识码:A 文章编号:1672-7800(2020)005-0029-04
0 引言
水下图像通常表现为能见度有限、低对比度、光线不均匀以及噪声模糊等。河蟹养殖以蟹塘养殖为主,受限于蟹塘客观环境以及采集设备硬件限制,难以获得清晰的水下图像。
水下图像在成像时,由于光线在水中传播,不同光谱波长的光呈现不同的指数衰减,波长最长的可见光最先被吸收。红光水下传输1m,其光强值就会减少2/3并在4~5m后基本消失。与其它波长光相比,蓝紫光最后被吸收。
传统的目标检测算法通常分为区域选择、提取候选区域特征、输入分类器训练分类几个步骤。Dalai等[1]提出梯度方向直方图(Histograms of Oriented Gradient,HOG)特征,经线性支持向量机(support vector machine,SVM)训练分类进行行人检测;FELZENSZWALB等[2-3]提出一种多尺度可变部件模型(deformable parts model,DPM)进行目标识别。传统目标检测算法中,手工设计的特征匹配主要是颜色、形状轮廓特征,由于水下河蟹图像对比度低、图像模糊以及纹理特征不明显等,导致河蟹识别效果不理想。
水下成像和户外大气雾霾相似,He等[4]提出基于大量户外清晰图像统计得出的暗通道先验(DCP)广泛应用于水下图像复原研究。针对水下河蟹图像低对比度、噪声严重、模糊难以识别的问题,本文提出基于暗通道先验和深度学习相结合的方法进行水下河蟹图像复原和识别。该方法考虑了水下环境不同光谱波长吸收存在差异的情况,有效提高图像对比度,减少噪声影响;将深度学习应用于河蟹养殖,在蟹塘复杂的水下快速准确识别河蟹,获得河蟹生长、分布信息,为全自动作业船精准投饲提供数据支持。
1 水下图像成像模型
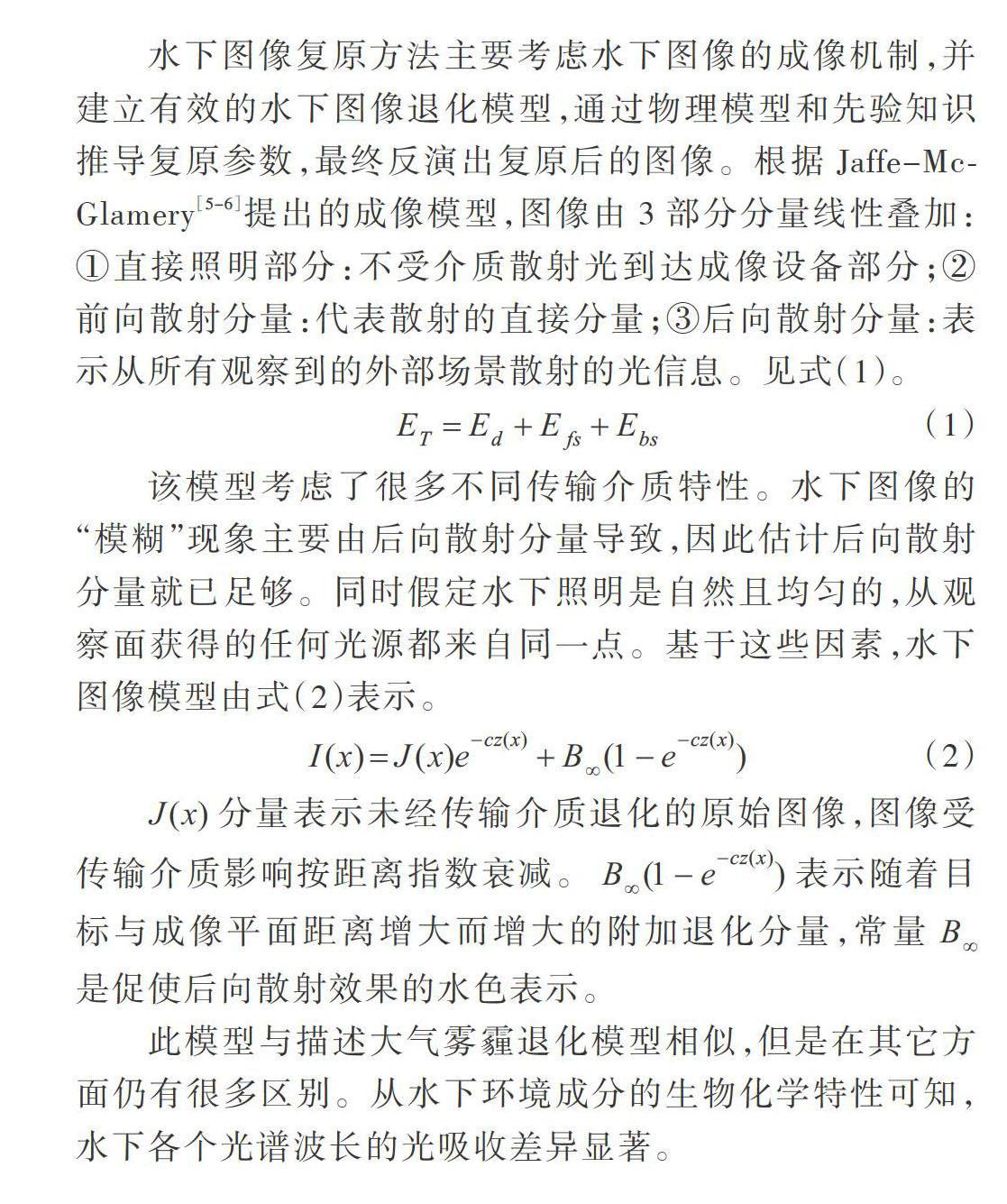
水下图像复原方法主要考虑水下图像的成像机制,并建立有效的水下图像退化模型,通过物理模型和先验知识推导复原参数,最终反演出复原后的图像。根据Jaffe-McGlamery[5-6]提出的成像模型,图像由3部分分量线性叠加:①直接照明部分:不受介质散射光到达成像设备部分;②前向散射分量:代表散射的直接分量;③后向散射分量:表示从所有观察到的外部场景散射的光信息。见式(1)。
[J(x)]分量表示未经传输介质退化的原始图像,图像受传输介质影响按距离指数衰减。[B∞(1-e-cz(x))]表示随着目标与成像平面距离增大而增大的附加退化分量,常量[B∞]是促使后向散射效果的水色表示。
此模型与描述大气雾霾退化模型相似,但是在其它方面仍有很多区别。从水下环境成分的生物化学特性可知,水下各个光谱波长的光吸收差异显著。
2 水下图像复原
2.1 暗通道先验
He得出的暗通道先验(DCP)结论为:在绝大多数非天空的局部区域存在着一些像素,其中至少有一個颜色通道的数值很小,即其光照值是一个很小的数,趋近于0。但是,DCP不能直接应用于水下环境。随着水下目标深度的加大,大部分波长的光会被吸收。
由于水介质对光的选择性吸收,所获得的水下模糊图像主要由波长较小的B、G通道表示,缺少衰减严重的R通道信息。依靠图像中的RGB表示,具有较大R、G、B值并不一定代表具有大的波长值,但是可以补偿在水下衰减的光信息量。因此,本文采用式(3)的方式估计暗通道。
其中,[Ω(x)]表示局部以x为中心的局部区域,本文引入R通道的补集(invR),由1-R计算得到。基于DCP及其变形应用方法很多。Chiang等[7]直接使用DCP结论,在水下环境增加了深度信息;Bianco等[8]考虑水下图像中红色分量与蓝绿分量水下吸收的显著差异,提出最大像素先验(Maximum Intensity Prior,MIP)。
2.2 传输介质透射率
根据式(2),将透射率定义为目标到成像平面距离的指数函数,用以描述某一点的模糊程度。透射率由式(4)表示。
2.3 透射率细化
引导滤波[9]与软抠图相比,最大的优点在于时间复杂度低、运算速度快。根据输出图像[qi]和引导图像[I]之间的局部线性关系式(9)可得:
当透射率[t(x)]很小时[J(x)会]偏大,将导致恢复图像整体向白场过渡,因此需要引入一个合理的阈值[t0]。当[t(x) 3 基于YOLO的河蟹检测 3.1 YOLOv3网络 与使用滑动分类器CNN[10]网络结构相比,YOLOv3[11-13]是可以同时预测目标位置、大小以及类别的统一网络。YOLOv3由53个卷积层组成,每个卷积层后都会增加BN层和Leaky ReLU层约束输出参数。该网络采用类似Inception Net[14]的机构,使用大量3×3卷积层并在卷积层之间插入1×1卷积层压缩特征。本文采用以Darknet-53 为基础改进的轻量级网络模型,13层网络结构如图2所示。 經过训练的网络模型在河蟹检测过程中会选取合适的候选区域,并对这些候选区域进行预测,最后对预测结果进行筛选,得到置信度较高的预测框。置信度公式(12)如下: 3.2 模型训练与评估 本文选择13层卷积网络训练模型,采用自制的水下河蟹数据集进行训练。训练参数为:动量系数0.9,权重衰减系数为0.000 5;训练迭代20 000次,迭代0~15 000时,学习率取0.001;迭代15 000~18 000时,学习率取0.000 1;迭代18 000~20 000时,学习率取0.000 01。 训练过程中,网络每迭代500次输出一个网络模型。根据制作的验证集评估每个网络模型的mAP。随着网络迭代的增加,网络模型趋于稳定,选择最高的mAP模型作为最终测试模型。mAP评估结果如图3所示。 图3中横坐标为每迭代500次输出的模型序数,纵坐标为相应的mAP值。从图中可以看出,网络迭代12 000(24×500)次之后,其mAP值已基本稳定。网络输出模型中最大的mAP值为90.53%,因此选择该模型作为本文所用预测模型。 对于所选的最终河蟹识别预测模型,还需调节网络测试模型的阈值参数。不同的阈值参数在识别过程中得到不同的精确率、召回率和F1值。不同参数指标如图4所示。 4 实验结果与分析 4.1 河蟹识别结果 采用从蟹塘采集的80幅水下河蟹图像进行识别,用时4s,平均每幅图像用时50ms。图5显示河蟹识别效果,没有出现漏检、误检错误,较好满足了实时性和识别准确率要求。 4.2 与传统方法对比 本文对相同数据集采用基于滑动窗口HOG+SVM的方法训练,并对水下摄像头采集的河蟹图像进行对比实验,对比测试结果如表2所示。 通过对比可知,基于13层卷积网络的检测方法与基于滑动窗口HOG+SVM检测方法相比较,不论在检测精度上还是在检测速度上都有显著提升,满足全自动均匀投饵作业船技术要求。 5 结语 水下河蟹图像纹理特征不明显,河蟹形状姿态各异,基于纹理、颜色和形状特征的目标检测算法在识别精度方面并不理想。 本文提出了基于暗通道先验和深度学习的水下河蟹识别方法。针对不同光谱波长色光在水下吸收的差异,以及水下河蟹图像存在对比度低、退化严重和模糊的现象,结合暗通道先验原理,增强图像对比度。引入卷积神经网络模型,能够快速准确识别水下河蟹,获得河蟹大小、数量及分布信息。 卷积神经网络识别精度及泛化能力取决于庞大的数据集。为提升网络泛化能力,后续研究需采集更多训练样本,完善网络模型,实现全自动均匀投饵作业船更精准投饵。 参考文献: [1] DALAI N,TRIGGS B. Histograms of oriented gradients for human detection[C]. IEEE Computer Society Conferenceon Computer Vision and Pattern Recognition,2005(1):886-893. [2] FELZENSZWALB P, MCALLESTER D, RAMANAND. A discriminatively trained, multiscale,deformable part model[C]. Boston:Computer Vision and Pattern Recognition,2008:1-8. [3] FELZENSZWALB P,GIRSHICK R B,MCALLESTERD,et al. Object detection with discriminatively trained part-based models[J]. IEEE Transactionson Pattern Analysis and Machine Intelligence,2010,32(9):1627-1645. [4] HE K M,SUN J,TANG X. Single image haze removal using dark channel prior[J]. IEEE Transactions on Pattern Analysis and Machine ntelligence,2011,33(12):2341-2353. [5] JAFFE J S. Computer modeling and the design of optimal underwater imaging systems[J]. Oceanic Engineering,IEEE Journal,1990,15(2):101-111. [6] MCGLAMERY B. A computer model for underwater camera systems[C]. Proceedings of SPIE 0208, Ocean Optics VI,1980:221-231. [7] CHIANG J Y,CHEN Y C. Underwater image enhancement by wavelength compensation and dehazing[J]. Image Processing, IEEE Transactionson,2012,21(4): 1756-1769. [8] HE K.Guided image filtering (matlab code)[EB/OL]. http://research.microsoft.com/en-us/um/people/kahe/. [9] KRIZHEVSKY A,SUTSKEVER L,HINTON G E.ImageNet classification with deep eonvolutional neural networks[C]. Advances inneural information processing systems,2012:1097-1105. [10] REDMON J,DIVVALA S,GIRSHICK R,et al. You only look once:unified,real time object detection[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2016:779-788. [11] REDMON J,FARHADI A. YOL09000:better,faster,stronger[C]. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2017:6517-6525. [12] REDMON J, FARHADI A. YOLOv3:an incremental im.provement[DB/OL]. https://arxiv.org/abs/1804.02767. [13] SZEGEDY C,IOFFE S,VANHOUCKE V,et al. Inception-v4,inception-resnet and the impact of residual connections on learning[EB/OL]. https://blog.csdn.net/kangroger/article/details/69488642. [14] HE K M,ZHANG X Y,REN S Q,et al. Deep residual learning for image recognition[C]. Proceedings o f the IEEE Conference on Com puter V ision and Pattern Recognition ,Las Vegas,NV,USA:IEEE,2016:770-778. [15] 魏湧明,全吉成,侯宇青阳. 基于YOLO_v2 的无人机航拍图像定位研究[J]. 激光与光电子学进展,2017,54(11): 95-104. [16] 王宇宁,庞智恒,袁德明. 基于YOLO 算法的车辆实时检测[J]. 武汉理工大学学报,2016,38(10):41-46. [17] 杨爱萍,郑 佳,王 建,等. 基于颜色失真去除与暗通道先验的水下图像复原[J]. 电子与信息学报,2015,37(11):2541-2547. [18] 刘海波,杨杰,吴正平. 等. 基于暗通道先验和Retinex理论的快速单幅图像去雾方法[J]. 自动化学报,2015 (7):1264-1273. (責任编辑:杜能钢)
