功率分流式混动汽车发动机转矩故障诊断及容错控制
2020-06-22周文太赵治国于海生
周文太,王 晨,赵治国,王 博,3,于海生,张 彤
(1.科力远混合动力技术有限公司,上海 201501) (2.同济大学汽车学院,上海 201804) (3.上海理工大学汽车工程研究所,上海 200093)
喷油不良、点火能量不合理等原因造成的发动机转矩不足、不出转矩等发动机转矩故障是较普遍的故障形式[1]。功率分流式混合动力控制系统通常采用发动机管理系统 (engine management system, EMS)根据转矩模型得到的发动机转矩理论值作为输入,计算行星齿轮转矩平衡所需要的电机转矩[2],但发动机转矩故障发生时,发动机转矩真实值往往低于理论值,因而难以实现预期的转矩平衡,可能会造成车辆驱动能力急剧恶化,因此有必要对其进行诊断并做妥善处理。
针对发动机故障,李俊松[3]提出基于神经网络的诊断方法,但该方法计算量大,不适合在嵌入式电子控制装置(electronic control unit, ECU)上应用。针对功率分流式混合动力汽车EMS报出的故障,刘龙龙[4]提出了基于规则的容错控制策略,但EMS很难诊断出喷油不良、点火能量不合理造成的发动机转矩故障。
针对功率分流式混合动力汽车的发动机转矩故障,本文提出一种基于行星齿轮转矩平衡数学模型的诊断方法,使用数学模型实时估算实际的发动机转矩,并根据估算值与理论值之差确定故障等级;提出分级容错控制策略,当发动机转矩不足时,不使用发动机转矩控制行星齿轮转矩平衡;当诊断结果为发动机不出转矩时,控制发动机停止工作,进入纯电动跛行。
1 混合动力系统建模
功率分流式混合动力变速箱采用双排行星齿轮结构。如图1所示,双排行星齿轮共用齿圈和行星架,齿圈R(ring)连接到输出轴Ho(hybrid output),行星架PC(planetary carrier)经扭转减振器TSD(torsional spring damper)连接到发动机,太阳轮S1(sun1)连接到电机E1,太阳轮S2(sun2)连接到电机E2。混合动力变速箱还拥有2个制动器,分别是用于锁止行星架的制动器B1,以及用于锁止太阳轮S1的制动器B2。
根据行星齿轮等效杠杆原理,可得行星齿轮的四轴转速关系[2]:
NS1=NHo·i1+NPC·(1-i1)
(1)
NS2=NHo·i2+NPC·(1-i2)
(2)
NS1=NE1
(3)
NS2=NE2
(4)
NPC=NENG
(5)
式中:i1,i2分别为前、后行星齿轮传动比;NHo,NPC,NS1,NS2分别为输出轴Ho、行星架PC、太阳轮S1、太阳轮S2的转速;NENG,NE1,NE2分别为发动机ENG、电机E1、电机E2的转速。
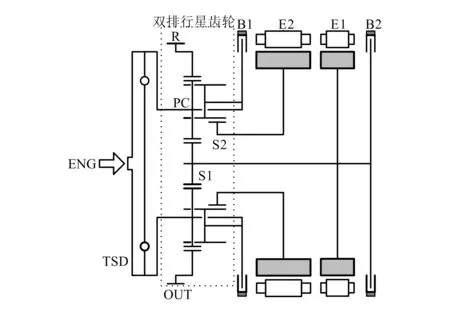
图1 功率分流式混合动力变速箱结构
行星齿轮的四轴转矩平衡关系为[2]:
TE1-JS1·aS1=TS1
(6)
TE2-JS2·aS2=TS2
(7)
TENG-JPC·aPC=TPC
(8)
TPC+TS1+TS2+THo=0
(9)
THo+TS1·i1+TS2·i2=0
(10)
式中:aS1,aS2,aPC分别为太阳轮S1、太阳轮S2、行星架PC的角加速度;JS1,JS2,JPC分别为太阳轮S1、太阳轮S2、行星架PC的转动惯量;TS1,TS2,TPC和THo分别为作用在太阳轮S1、太阳轮S2、行星架PC以及输出轴Ho上的转矩;TENG,TE1,TE2分别为发动机、电机E1、电机E2的输出转矩。
2 基于数学模型的故障诊断策略
基于行星齿轮的转矩平衡关系,只要知道TENG,TE1,TE2,THo,aS1,aS2中的任意4个,便可根据式(6)~(10)计算得到另外2个值。因此构建如式(11)的数学模型,使用TE1,TE2,aS1,aS2作为输入,可得到发动机转矩估算值TENG_actl。其中,TE1,TE2由电机控制器(power control unit,PCU)计算,精度较高;aS1,aS2通过电机E1转速、电机E2转速取微分得到。
TENG_actl=(TE1-JS1·aS1)·(i1-1)+(TE2-JS2·aS2)·(i2-1)+[(aS1·i2-aS2·i1)/(i2-i1)]·JPC
(11)
将发动机转矩估算值TENG_actl与理论值TENG相减得到二者之差eT。
eT=TENG-TENG_actl
(12)
根据eT与TENG的比例关系决策发动机转矩故障等级,见表1。为防止因信号噪声导致误判,在同一故障持续存在4 s后设定故障等级。

表1 发动机转矩故障等级决策
3 发动机转矩故障时的容错控制
针对发动机转矩故障实施的分级容错控制见表2。
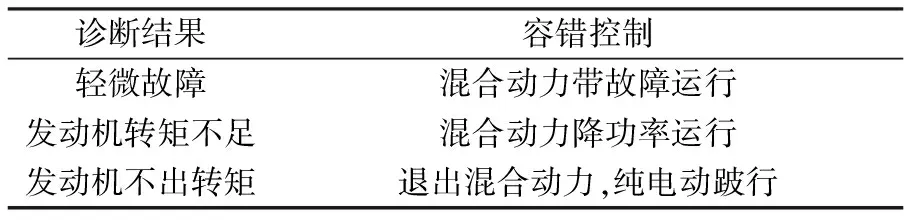
表2 发动机转矩故障分级容错控制
图2所示发动机转矩故障诊断及容错控制策略架构包含3个模块,分别是混合动力带故障运行、混合动力降功率运行、纯电动跛行。
3.1 混合动力带故障运行
发动机发生轻微转矩故障时,采用混合动力带故障运行的容错控制方案。此时,混合动力系统通常工作在如图3所示的功率分流混合动力模式。
在混合动力带故障运行模式,通过式(13)、(14)将输出轴转矩THo解耦为电机E1的转矩TE1以及电机E2的转矩TE2,并发给PCU。
TE1=[THo·(i2-1)+(TENG-JPC·aPC)·i2]/(i1-i2)+JS2·aPC·(1-i2)
(13)
TE2=[THo·(i1-1)+(TENG-JPC·aPC)·i1]/(i2-i1)+JS1·aPC·(1-i1)
(14)
式中:aPC根据发动机实际转速与目标转速之差eN基于PI控制算法计算得到。
eN=NENG_req-NENG_actl
(15)
(16)
式中:NENG_actl为当前发动机实际转速;NENG_req为发动机目标转速;KP,TI为PI控制器参数;t为时间。
使用TENG与aPC的转矩协调控制方法可对aPC精确控制,发动机转速变化率控制精度较高,因而可以获得较好的平顺性及较低的发动机噪声。但这种控制方法对TENG的精度要求较高。
3.2 混合动力降功率运行
发动机转矩不足时,采用混合动力降功率运行的容错控制方案。此时如果依旧使用发动机转矩理论值TENG计算TE1,TE2,则难以实现预期的行星齿轮转矩平衡,因此在发动机转矩不足时,舍弃发动机转速变化率的控制精度,如图2的混合动力降功率运行模块所示,不再使用TENG,aPC做转矩协调控制。

图2 发动机转矩故障诊断及容错控制策略架构
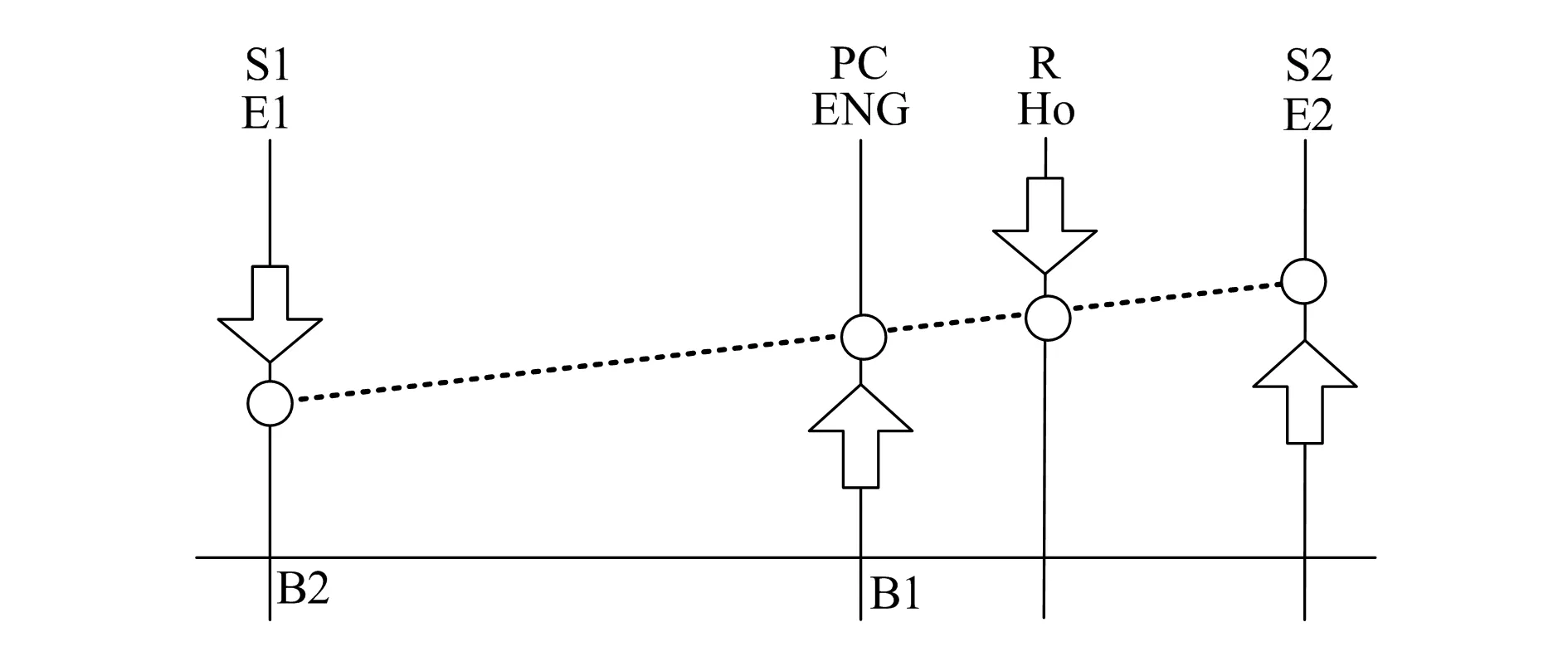
图3 功率分流混合动力模式杠杆图
此时的转矩协调控制算法如式(17)、(18)。电机E1的主要功能是控制发动机转速,因此以发动机转速差eN=0为控制目标,以TE1为控制对象,基于PI控制算法计算TE1。
(17)
基于行星齿轮的转矩平衡关系,根据式(10)推导出式(18),由式(18)计算TE2。
TE2=-(THo+TE1·i2)/i2
(18)
3.3 纯电动跛行
发动机不出转矩的原因通常是油路、气路、火路发生了重大故障或者燃油已耗尽,此时不宜让发动机继续工作。为此,发动机不出转矩时,控制发动机停止工作并进入纯电动跛行模式。由于电机E2单独驱动能满足跛行时的转矩需求,且单电机驱动没有电功率回环、经济性更佳,因此纯电动跛行采用电机E2单独驱动,此时的杠杆图如图4所示。

图4 电机E2单独驱动的纯电动跛行杠杆图
电机E2单独驱动的纯电动模式下,发给EMS的发动机转矩需求及发给PCU的电机E1转矩需求均为0。此时电机E2到输出轴为固定速比传动,根据速比关系计算TE2:
TE2=-THo/i2
(19)
4 仿真验证
由于发动机轻微故障时采用的转矩协调控制策略与发动机状态正常时一致,因此本文仅针对转矩不足、不出转矩两个等级的故障进行仿真验证。
发动机转矩故障发生时,需及早诊断出故障,因此选择起步工况作为验证工况,期望在4 s内检测出故障并进行处理。
4.1 发动机转矩不足时的容错控制验证
图5~图7为验证结果。图5中,TENG为85 N·m,根据数学模型估算的TENG_actl为60 N·m,满足发动机转矩不足故障的诊断条件。图5、图6中,0~4 s故障已发生,但处于计时阶段,未进入容错控制,此时输出轴转矩需求值THo为-150 N·m,输出轴转矩实际值THo_actl为-120 N·m;发动机目标转速为1 500 r/min,发动机实际转速低于1 400 r/min。可见,在发动机转矩不足故障发生后,无容错控制时既不能实现发动机目标转速,也不能充分响应输出轴转矩需求。

图5 发动机转矩不足故障时的4轴转矩
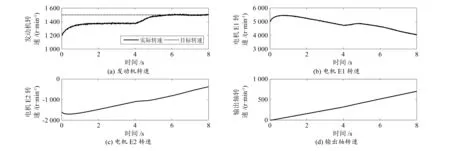
图6 发动机转矩不足故障时的4轴转速
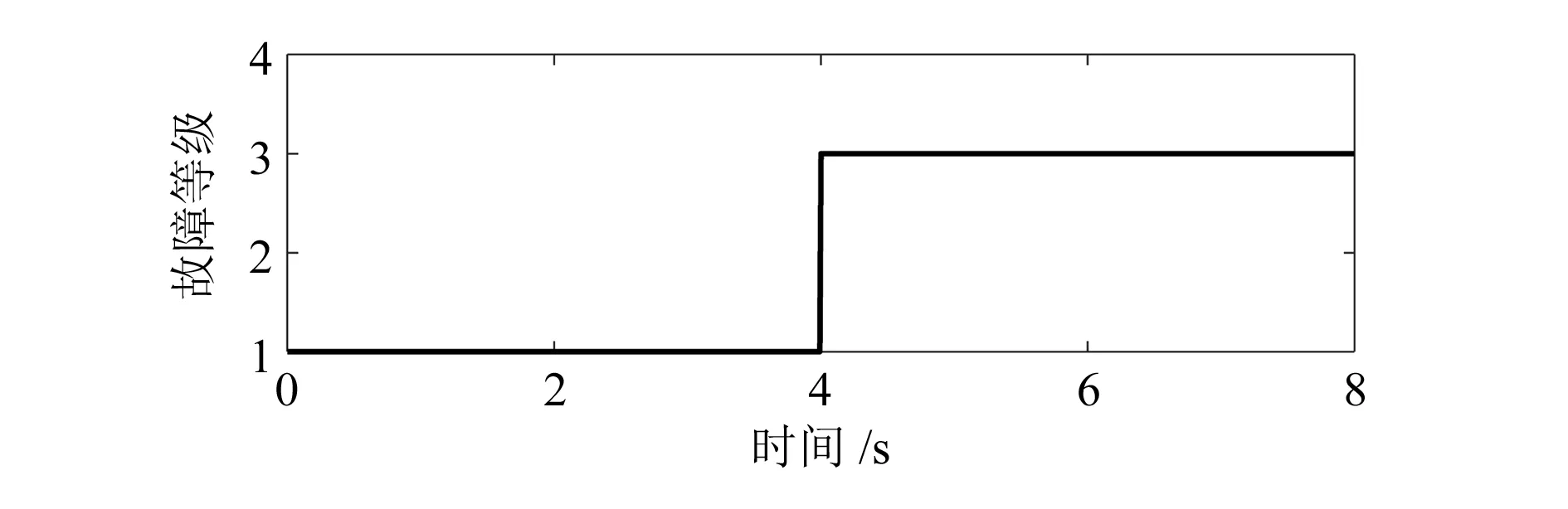
图7 发动机转矩不足故障时的故障等级信号
如图7所示,在故障持续4 s后混合动力控制系统将故障等级置为3级,并调用降功率运行的转矩平衡模型。由图5~图6可知,从第4 s开始,THo_actl开始逼近需求值,1 s后达到了目标;由图6可知,从第4 s开始,发动机实际转速开始逼近目标转速,1 s后达到了目标。
4.2 发动机不出转矩时的容错控制验证
图8~图10为验证结果。图8中,TENG为85 N·m,根据数学模型估算的TENG_actl为8 N·m,满足发动机不出转矩故障的诊断条件。图8、图9中,0~4 s故障已发生,但处于计时阶段,未进入容错控制,此时输出轴转矩需求THo为-150 N·m,输出轴转矩实际值THo_actl为-100 N·m;发动机目标转速为1 500 r/min,实际转速为1 200 r/min左右。可见在发动机不出转矩故障发生后,无容错控制时既不能实现发动机目标转速,也不能充分响应输出轴转矩需求。
如图10所示,在故障持续4 s后混合动力控制系统将故障等级置为4级,并调用降功率运行的转矩平衡模型。由图从第4 s开始,THo_actl开始逼近THo,1 s后达到THo;由图8可知,第4 s发动机熄火。可见,有容错控制之后,发动机转速、输出轴转矩均能达到目标值。
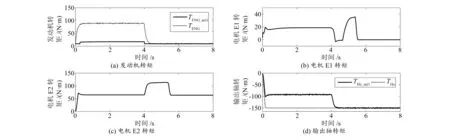
图8 发动机不出转矩故障时的4轴转矩
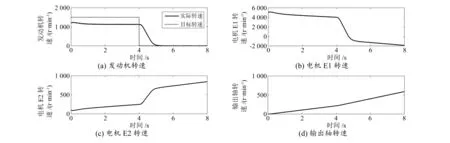
图9 发动机不出转矩故障时的4轴转速
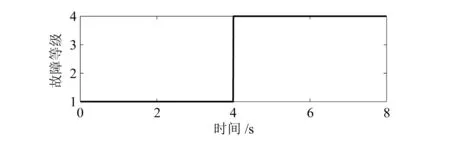
图10 发动机不出转矩故障时的故障等级信号
5 结束语
本文针对功率分流式混合动力汽车的发动机转矩故障,提出了基于行星齿轮转矩平衡数学模型的诊断方法,设计了分级容错控制策略并进行了仿真验证。结果显示,设计的控制策略能够在预期的时序诊断出发动机转矩故障,并且经过容错控制后,发动机转速、输出轴转矩均达到了目标,判断控制策略实现了预期的功能。本文的研究内容可避免发动机转矩故障发生时车辆驱动能力恶化,有助于提升功率分流式混合动力汽车的安全性及可靠性。
