表征防御性驾驶技术与情绪智力提升的多元线性回归模型
2020-06-19祁晓峰
祁晓峰
(江苏汽车技师学院,江苏 扬州 225003)
0 引言
防御性驾驶是指在多因素耦合的交通环境或状态下,尤其在预期交通参与者违法违规驾驶的情况下,驾驶人能预先感知风险,能正确地分析判断,并能及时地做出调整或规避的方案,并准确及时的实施的驾驶方法。驾驶人情绪智力是驾驶人情绪和驾驶智力的总称,驾驶智力是指驾驶人在行车过程中对车辆的控制能力、感知能力、判断能力、记忆能力、注意能力等;驾驶人情绪是指行车过程中驾驶人的情感及其稳定性。目前,国内外对防御性驾驶技术和驾驶人情绪智力的研究主要分防御性驾驶的可行性和必要性研究及行为识别判断研究两个方面。在可行性和必要性分析方面:Knipling R R等人[1]2003年,提出驾驶人可靠性包含8个方面的内容:风险驾驶行为、高风险驾驶人、驾驶人的身体意识、驾驶风格、缺乏防御性驾驶技术、与装卸有关的延迟、疲劳驾驶、攻击性驾驶。Neto J P L等人[2]2011年,提出防御性驾驶是交通流控制的重要因素,若把握不好实施防御性驾驶的节点,会造成交通流整体的延迟。Huang J L等人[3]2012年,利用112名驾驶人5星期的数据宏观分析了防御性驾驶培训,对提升驾驶人内部驾驶智力的影响,结果显示防御性驾驶培训能提升驾驶人的自我控制能力,具体表现为速度控制或方向控制节点的优化。Habibovic A等人[4]2013年,分析在步行街上发生事故和驾驶可靠性的关系,并通过对录像分析显示,视野盲区和分心驾驶是驾驶可靠性下降的主要因素。Mihai C等人[5]2014年,通过对罗马尼亚运输企业外部环境和企业内部运营框架分析,得出对驾驶人开展防御性驾驶培训使驾驶人KPI平均提升3%~5%,得出对驾驶人开展防御性驾驶技术培训有助于降低企业成本,提高企业竞争力,并倡导对罗马尼亚全部驾驶人开展防御性驾驶培训。Bebinov S等人[6]2016年,将驾驶人培训分为3个阶段,第1阶段是初始驾驶人技能提升阶段,此阶段驾驶人可靠性主要表现为驾驶人反应的灵敏性等;第2阶段是防御性驾驶培训阶段,此阶段驾驶人可靠性表现为驾驶风格和习惯,此阶段驾驶风格可以补偿一部分由于驾驶心理和生理的不足造成的安全风险;第3阶段为驾驶动机主导阶段,此阶段驾驶人动机为驾驶可靠性的主导因素,不良的驾驶动机会削弱驾驶人的可靠性。Rizeanu S等人[7]2017年,对60名18~65岁的驾驶人进行了防御性驾驶训练,发现防御性驾驶训练有助于提升驾驶人的情绪智力,并分析了开展防御性驾驶培训与驾驶人年龄的相关性。Charisma等人[8]2019年,通过分析得出防御性驾驶技术训练对BRT驾驶人是必不可少的,比如让乘客养成系安全带的习惯和进行每周的防御性驾驶讨论。候培国等人[9]2019年,提出一种基于防御性驾驶的一维元胞自动机交通流模型,该模型对驾驶实时防御性驾驶的时间和速度进行了规划,并与敏感驾驶模型(SDNaSch)进行了对比,结果显示基于防御性驾驶的一维元胞自动机交通流模型交通资源利用率更高,更加符合实际情况。在判断与识别方面:Brombacher P等人[10]2017年,提出一种基于神经网络的驾驶人驾驶风格辨识模型,主要对驾驶人采取防御性驾驶行为进行了辨识。并对模型进行了数据验证,通过对未采取防御性驾驶或其他危险驾驶行为的预警,减少事故发生的可能性。贺鹏麟等人[11]2018年,提出了一种驾驶人实施防御性驾驶技术的判别系统及车辆。对驾驶人实行防御性驾驶进行识别,对驾驶人的驾驶风格进行记录。在提高驾驶人的驾驶可靠性方面,Lai P Y等人[12]2018年,设置了一种仪器提醒驾驶人开展防御性驾驶的节点,并对危险区域的风险进行了评估,通过车载设备实时传输给驾驶人。
以上研究对提高驾驶可靠性、降低道路交通事故的发生率起到了很好的成效,但缺少了防御性驾驶培训对驾驶人情绪智力提升定量关系的分析,因而缺少对培训成效的预测与评估等环节,本研究针对此问题,分析驾驶人情绪智力评价指标和防御性驾驶技术流程,分析目前对驾驶人开展防御性驾驶的主要关键节点。并基于对驾驶人开展防御性驾驶的成效数据,构建一种基于多元线性回归的表征防御性驾驶技术与情绪智力提升关系的模型,为开展相应的预测与评估等打好基础。
1 情绪智力评价指标
Goleman[13]1995年提出,驾驶人情绪智力的评价指标为自我认知(自我意识)、自我控制(渴望真理、责任心、适应性创新)、动机、感动深受(理解别人、多样化),社会技能(影响,交流,冲突管理,领导,关系建立,合作,团队协作能力),同时还提出情绪智力大部分来自后天的培养,良好的教育培训对提升情绪智力有明显的作用。Sparrow等人[14]2006年提出,驾驶人情绪智力从人际关系和自我认知两个方面描述,自我认知表示自我管理能力,人际关系表示人际关系管理能力,Stein等人[15]2006年,提出自我认知表示驾驶人的理解和与其他人交流的能力,分为感同身受、社会责任、人际关系3个方面。任秀伟[16]2014年提出,驾驶人情绪智力为驾驶人的情绪及智力,一是主观上的驾驶情绪,与驾驶人的心情、感情及其稳定性有关;二是客观上的驾驶智力,包括驾驶人对道路环境的感知力、记忆力、辨别力、判断力和决策力等。基于以上研究成果,本研究建立驾驶人情绪智力评价指标见图1。
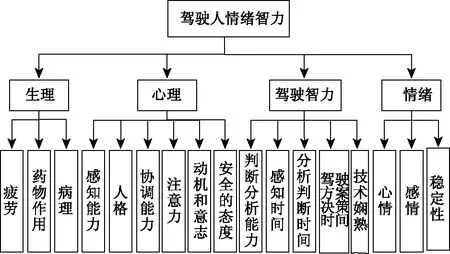
图1 驾驶人情绪智力评价指标Fig.1 Evaluation indicators of driver’s emotional intelligence
2 防御性驾驶技术分析与培训体系设计
2.1 防御性驾驶技术分析
防御性驾驶技术是一种避免自身事故发生可能性的驾驶技术,包括风险感知、分析判断、做出决策、正确实施4个方面。余泰初[17]2019年,提出驾驶人的风险感知是从时间和空间的角度获取交通环境的各种要素,理解并预测其未来状态的过程。并将驾驶人风险感知总体上归为驾驶人对交通环境中突变信息的感知。驾驶人分析判断是指驾驶人大脑思维对感知事物所做出的判断与实际情况的对比。分析判断与实际相符合则分析判断正确,与实际不相符则分析判断错误。Steimetz S C等人[18]2007年,对防御性驾驶和安全风险、出行延迟之间的关系进行了研究,提出防御性驾驶对出行时间的一种消耗,并针对如何平衡防御性驾驶和出行时间之间的关系提出了一种数学模型,实现基于出行延迟的事故发生预测。由以上研究可以看出,防御性驾驶是一门技术,是驾驶人多方能力的综合体现,基于以上研究,本研究形成了防御性驾驶技术的流程与能力需求见图2。
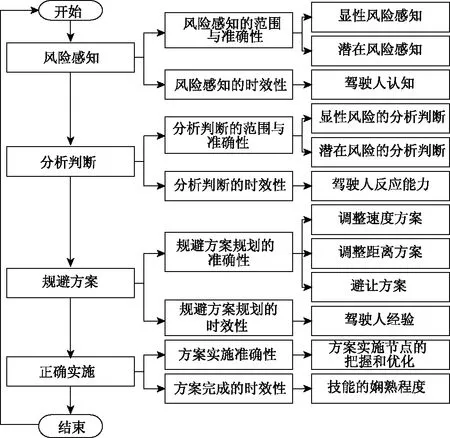
图2 防御性驾驶技术流程与能力需求Fig.2 Flowchart of defensive driving technology and capability requirements
2.2 防御性驾驶培训体系设计
(1)目标
通过培训掌握危险源识别、出车前的预防性自检、各种道路和路口的防御性驾驶、应急状态下的防御性驾驶、各种气候条件下的防御性驾驶。通过培训具备各种行车状态下的防御性驾驶能力,预防不良驾驶习惯,熟悉和掌握常见紧急情况的处置原则和方法,熟悉和掌握道路交通事故现场的应急处置方法与伤员救护,熟悉和掌握事故后的脱困方法,熟悉和掌握乘客突发疾病的应急处理,通过培训提升驾驶人防御性驾驶心理和生理、驾驶情绪智力方面的能力。
(2)培训方式
采用现代化多媒体课件、汽车驾驶模拟机器、实车等教学设备,开展理论教育、模拟实践、实车操作、案例分析、安全体验等培训方式,结合驾驶人的自身条件进行个性化培训。
(3)参考教学内容及时间分配
根据防御性驾驶技术流程及能力分析、培训目标及方式,得出参考防御性驾驶培训内容及学时见表1。

表1 参考社会车辆驾驶员防御性驾驶培训内容及学时Tab.1 Reference of defensive training content and class hours of social vehicle drivers
3 表征防御性驾驶技术情绪智力的多元线性回归模型
3.1 目标与假设
目标:由图1、图2可以看出,实施防御性驾驶对驾驶人能力的要求与驾驶人情绪智力两者之间有多个共同的指标,同时也有不同的指标,两者之间存在相关性,由此,本研究的目标为发现防御性驾驶技术与驾驶人心情智力之间的关系,并对两者之间的关系建模,实现关系量化研究。
假设:防御性驾驶培训对于驾驶人情绪智力只产生正面的影响;培训机构对驾驶人都按照防御性驾驶的要求完成了培训的义务;驾驶人在接受培训时都按照要求完成了培训。
3.2 数据描述
(1)参与人员
本试验实施公开召集志愿者的方式,共召集13名社会车辆驾驶员志愿者,年龄在23~49岁之间,平均年龄36岁,标准偏差4.2周岁;驾龄在26~1年,标准偏差9.3年,平均驾龄3.8年。参与人员在被测试时均保持良好的精神状态,身体均无心血管等生理疾病,视力和听力符合驾驶要求。
(2)设备描述
本试验测量的对象驾驶人的情绪智力,使用Schutte, N. S.等人[19]1998年,设计的量表和评价交通中情绪智力的观察表,使用驾驶模拟器见图3,综合测量驾驶人的心理和生理、驾驶智力、情绪各项指标,总分共计100分,其中,模拟驾驶占70分,量表和观测表总计30分。生理指标18分,心理指标34分,驾驶智力指标30分,情绪指标18分。

图3 防御性驾驶模拟器Fig.3 Defensive driving simulator
(3)方式方法
参加者均经历两个模拟场景:①模拟器中面对3组正面撞击和翻车的情况。测试驾驶人心理和生理、智力情况;②设置驾驶人观看有情绪影响的片段,然后在模拟器上进行在不同交通流饱和度条件下,开展防御性驾驶的实践操作;③使用建议的等级量表进行评估。参与者均参加了包括培训前、培训中、培训后的8次测试。
(4)数据收集
本研究共收集每名志愿者8次的测试数据,共计104条数据,列举编号为1的驾驶人数据见表2。
由表2可以看出,驾驶人防御性测试得分随着参加时长增加不断提高,生理指标得分随着培训参加时长的增加变化不明显;心理指标得分在40 h之前增加缓慢,在40 h之后提升较为明显;驾驶智力指标得分在40 h之前增长较为明显,在40 h之后增加缓慢;情绪指标得分在40 h之前增长缓慢,在40 h 之后增加明显。
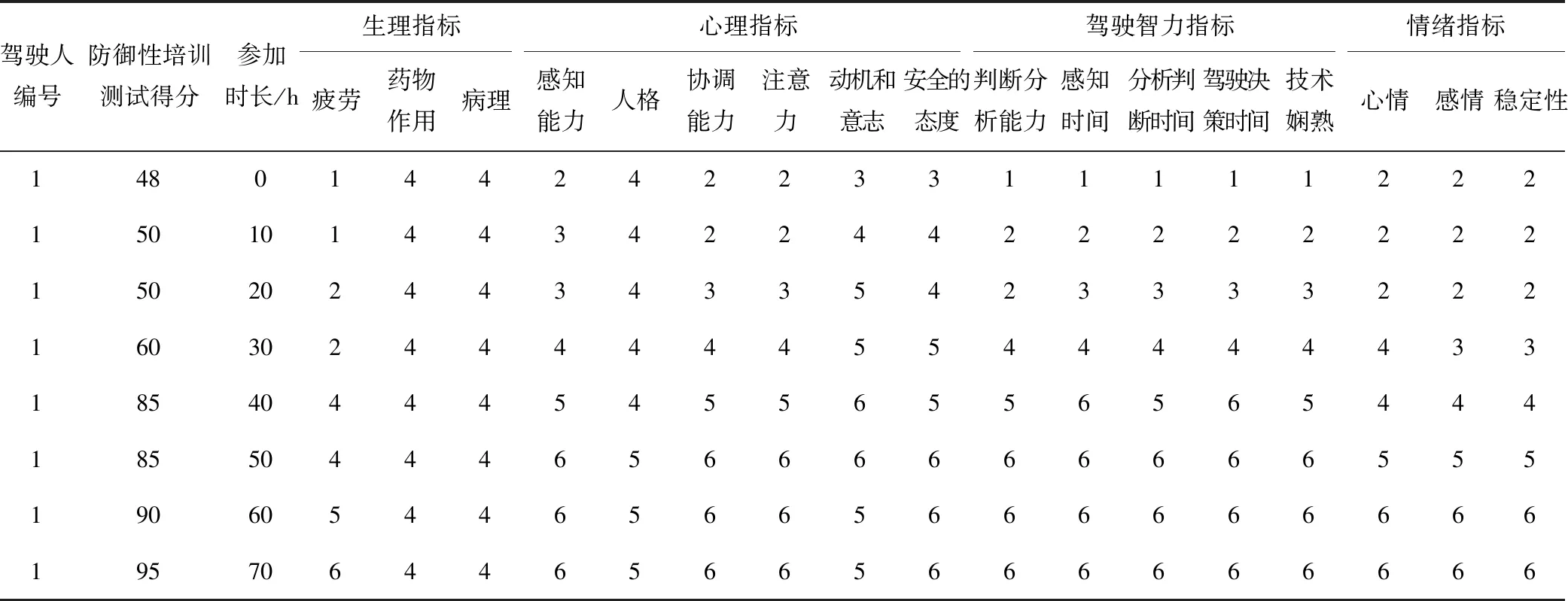
表2 部分参与人员情绪智力提升统计表Tab.2 Statistical table of emotional intelligence improvement of some participants
3.3 模型构建
(1)线性关系观测
假设驾驶人生理为x1,心理为x2,驾驶智力为x3,情绪为x4,时长为x5为因变量,y为防御性驾驶培训测试得分,为了观测因变量y与各自变量之间是否存在较为明显的线型关系,将y与x1,x2,x3,x4之间的变化映射到散点图如图4所示。
从图4可以看出,点(xi,y)基本分布在两条直线两侧,结合表2的结果,我们可以构建分段线型回归模型。
(2)理论多元线性回归模型
设因变量y与自变量x1,x2,…,xn-1共有n组实际观测数据,y是一个可观测的随机变量,它受到n-1个非随机因素x1,x2,…,xn-1和ε随机因素的影响,若y与x1,x2,…,xn-1有如下线性关系:
y=β0+β1x1+β2x2+…+βn-1xn-1+ε,
(1)
式中,y为因变量,x1,x2,…,xn-1为自变量;β0,β1,β2,…,βn-1是未知参数;ε是均值为零,方差为σ2>0 的不可观测的随机变量,称为误差项,并通常假定,ε~(0,σ2) 。

图4 防御性驾驶培训测试得分与相关指标散点图Fig.4 Scatter grams of defensive driving training scores vs. related indicators
(3)模型检验
F检验是根据平方和分解式,直接从回归效果检验回归方程的显著性,F检验具有直观,精准的特性[20],由此,本研究使用F检验的方法进行模型的线性特性检验,具体的检验过程放在方差分析表中进行,见表3。

表3 方差分析表Tab.3 Table of variance analysis
其中,SSE为残差平方和,SSR为回归平方和,SST为总离差平方和。F为检验统计量,p为自变量的个数。
(4)结果分析
对于50个训练样本利用SPSS 22.0得出x1,x2,x3,x4,x5的回归系数见表4,表中,“/”表示培训40 h前后两个阶段。
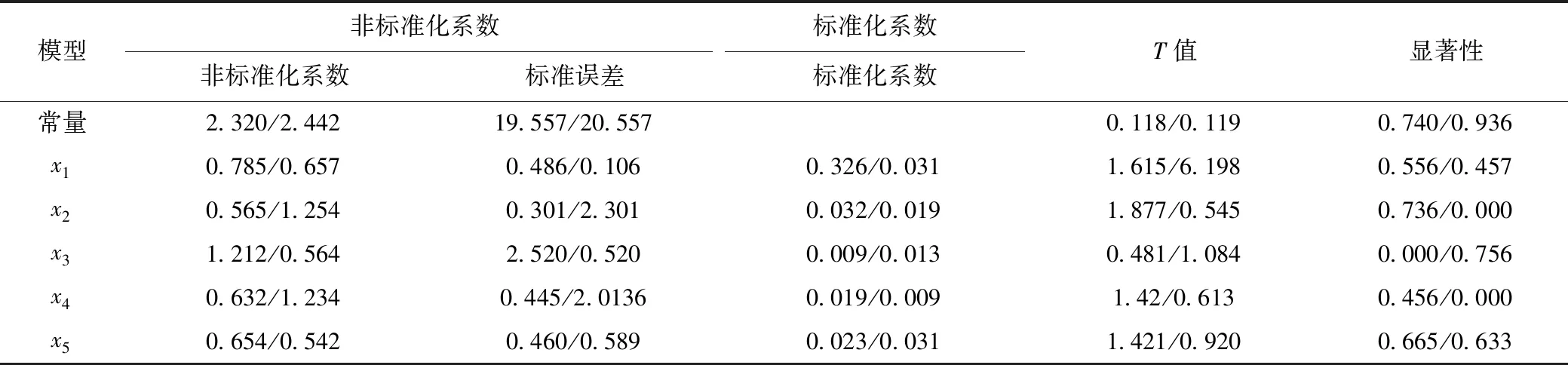
表4 回归系数表Tab.4 Table of regression coefficient
得出4个自变量的多元线性回归模型为公式(2)。得出回归方差分析结果见表5。
(2)
由公式(2)可以看出,在培训时长小于40 h时,防御性驾驶培训效果与驾驶人智力提升相关性最大,此阶段驾驶人主要表现为感知、分析判断、决策、实施的敏捷性提升;在培训时长大于40 h时;防御性驾驶培训效果与驾驶人心理和情绪相关性最大,此阶段驾驶人主要表现为目标、意志、动机、自我控制、情绪稳定性的提升。
由表5可以看出,Sig. 即显著性P值≈0.058/0.036可知,此回归方程显著,即做出的5个自变量对因变量y产生显著线性影响的判断犯错率的概率仅为0.058/0.036。

表5 回归方差分析结果Tab.5 Variance analysis regression result
注:#预测变量:(常量)x1,x2,x3,x4,x5。
4 结论
本研究针对防御性驾驶培训与驾驶人情绪智力关系研究欠缺的问题,分析了影响驾驶人情绪智力的因素,构建了驾驶人情绪智力评价指标,分析了防御性驾驶技术的实施流程及对驾驶人能力的要求,对开展防御性驾驶培训体系给出了总体的设计框架,为了进一步量化表示两者的关系,提出了一种表征防御性驾驶技术培训与驾驶人情绪智力提升之间关系的多元线性回归模型,此模型分两个阶段描述驾驶人心理和生理、驾驶智力、情绪、学习时长5个自变量与防御性驾驶培训成效因变量之间的线性关系。并对多元线性回归模型的有效性进行了F检验,验证效果显示了模型的有效性。通过模型分析对驾驶人开展防御性驾驶培训得出两点结论:(1)对驾驶人的防御性驾驶培训在最初的阶段,技能的娴熟性提升效果最佳,应重点加强防御性驾驶基础知识的培训;(2)在驾驶人的防御性驾驶培训的深入阶段,驾驶人的心理和情绪提升效果最佳,应重点加强防御性驾驶认知、安全意识、自我控制、意志与动机等情绪智能方面的培训。