基于iMx6UL与时钟同步技术的微震监测系统设计
2020-06-19孙学波陈发兵王元杰
孙学波,陈发兵,王元杰
(1.天地科技股份有限公司 开采设计事业部,北京 100013;2.煤炭科学研究总院 开采设计研究分院,北京 100013)
冲击地压,是一种岩体中聚积的弹性变形势能在一定条件下突然猛烈释放,导致煤岩爆裂并弹射出来的现象,常常引发顶板事故,破坏井巷,并造成人员伤亡,毁坏设备,污染作业环境,严重影响煤矿生产与人员的生命。目前,随着我国煤矿开采深度的不断增加,冲击地压灾害呈现越来越严重的发展态势,给煤矿安全生产和广大煤矿职工的生命安全造成了极大的威胁[1-4]。
随着矿山数字化,信息化的发展,微震监测技术在冲击地压突出的矿山应用非常广泛,成为监测微震发生的一项重要技术[5,6]。
微震监测技术主要是通过振动传感器采集煤岩体破裂过程中释放的振动信号,经过对数据的拾取、传输、计算后进行定位与能量计算,确定振动源的位置与能量等级,为煤矿开采冲击地压产生的倾向性评价与预防提供了重要手段。
目前,国内的微震监测系统以进口为主,有波兰EMAG采矿电气自动化研究与发展公司生产的ARAMIS微震监测系统、波兰矿山研究总院采矿地震研究所生产的SOS微震监测仪、南非ISSI公司生产的ISS高精度微震采集系统、加拿大工程微震集团公司生产的ESG等。这些微震监测系统优点是精度高,但缺点是价格昂贵,系统维护难度大。随着国内各高校与科研机构对冲击地压持续关注与科研的投入,微震监测仪器的国产化也得到发展,但纵观国内设备,普遍采用低速的微处理器,具有时间同步精度低,定位误差大、系统不稳定等缺点[7-11]。为此,笔者设计了一款基于高速ARM为处理器的高精度微震监测系统,该系统采用Linux为操作系统,Linux集成了支持IEEE1588的网络通讯协议,传感器数据采集选用了24位高精度AD转换器,满足微震监测系统高精度与高实时性的要求。
1 系统结构
该系统主要由磁电传感器、网络数据采集仪、网络交换机、计算机等构成。磁电传感器拾取煤矿现场震动信号后传递给网络数据采集仪,网络数据采集仪同时对6路传感器的信号进行AD量化采集,在系统网络时间同步机制下,各数据采集仪根据同步时间把同一时刻的数据送入光纤环网,环网中的地面计算机接收到网络中的数据后进行数据分析,鉴别出异常数据后打包存储。当得出一系列符合微震时间算法的数据后,调用后台的定位与能量算法软件,得出目标位置和能量信息,为冲击地压的评估与预测提供依据[12-15]。整套系统结构如图1所示。
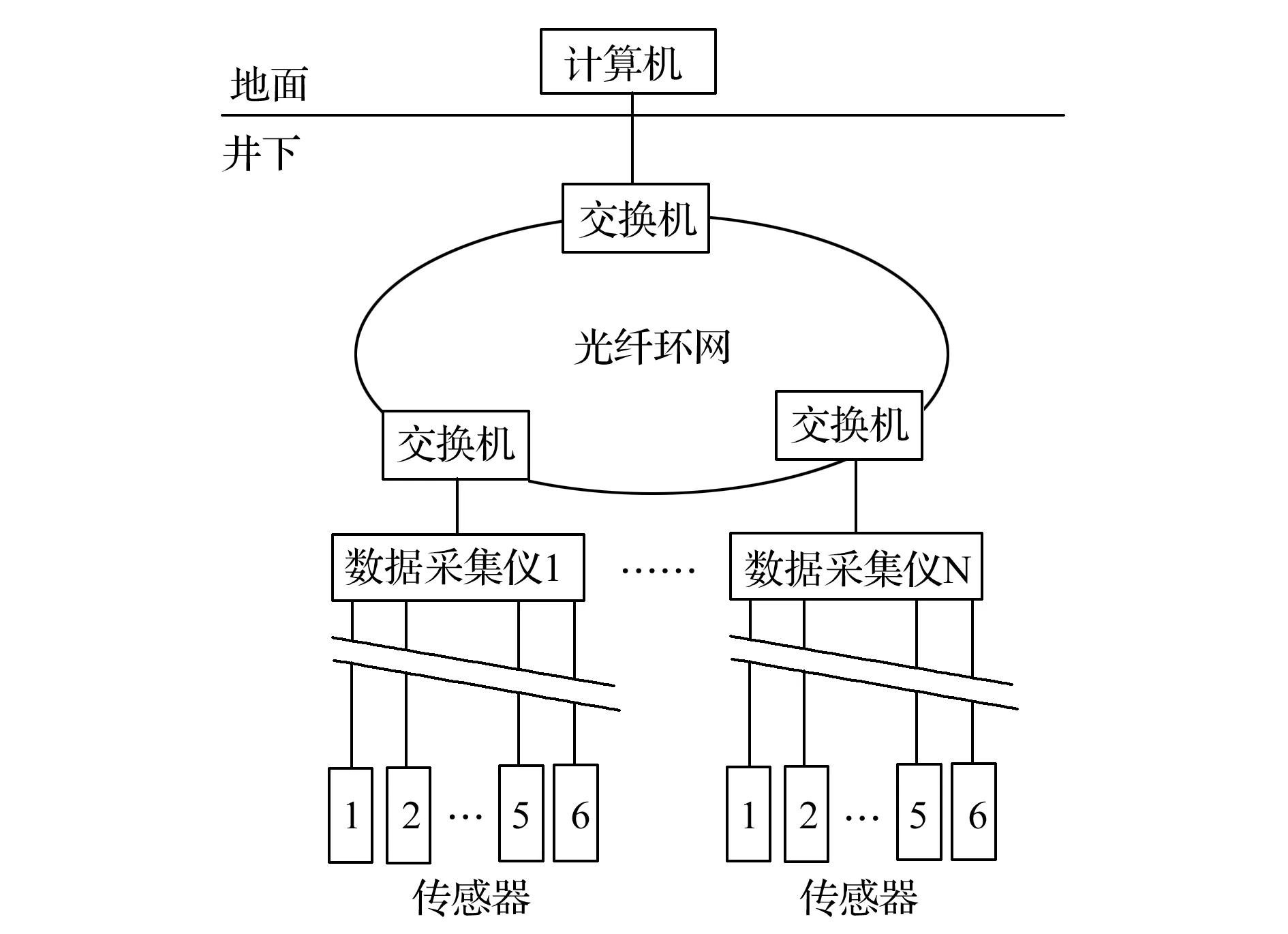
图1 微震监测系统结构图
2 硬件系统设计
微震监测系统主要有传感器、数据采集器、环网交换机以及上位机等组成。传感器获取微震信号后传输给数据采集器,数据采集器对信号进行滤波、放大后进入数据采集器的AD转换通道,数据采集器的主处理器把模拟量的传感器信号转换成数字信号。同时,数据采集器通过IE1588协议对自身系统进行网络校时,使处于网络内的各数据采集器系统时间精确同步。当主处理器采集完数据后,再把当前数据赋予实时时间戳后通过网络上传到地面计算机。这样,计算机每次接收到的各采集器数据都是各仪器在同一时刻接收到震动信号数据,因而数据采集器所连接传感器的位置到震源位置的信号时间差相对精确度高,保证定位算法的准确性。数据采集器系统结构如图2所示。
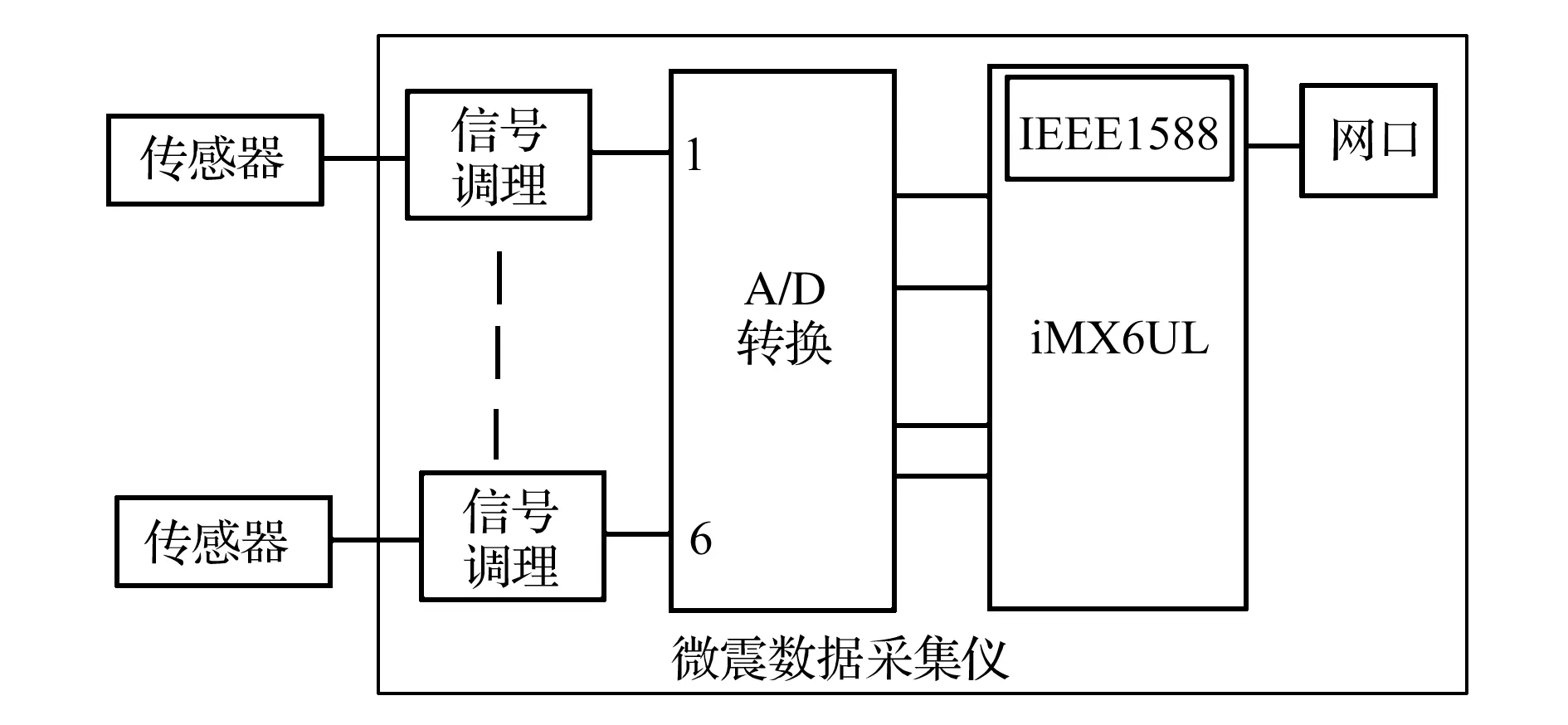
图2 数据采集器系统结构图
2.1 传感器设计
该系统选用速度型磁电式传感器,这种传感器利用电磁感应的原理,将机械振子的机械运动转化为易于测量电信号,属于无源式电传感器,适合动态测量。由于速度型磁电式传感器输出功率大,灵敏度高,后续匹配电路简单,所以得到广泛应用。
根据电磁感应原理,磁电式传感器有两种结构类型:变磁通式和恒磁通式,在恒磁通式结构中,工作气隙中的磁通恒定,感应电势是由于永久磁铁与线圈之间具有相对运动:线圈切割磁力线而产生。恒磁通式结构也分两种结构类型:动圈式和动铁式。该系统选用的传感器为动铁式,结构如图3所示。

图3 微震传感器原理结构图
动圈式传感器的结构特点为轴向充磁的圆柱形磁钢与壳体固定,壳体固定在基座上,磁钢与壳体为固定部件,缠绕线圈的支架与顶杆组成可动部件,线圈经弹簧支撑悬挂在空气中。顶杆的一端带动线圈转动切割磁感应而产生电动势,电信号通过引线输出。但引线也有运动速度,故在工作过程中接头处容易损坏,影响动圈型磁电传感器的可靠性与使用寿命。同时,动圈式传感器需要一个匀强磁场环境,以保证传感器的线性特性,因而设计该类传感器时容易受体积、重量、及内电阻等因素限制。而动磁铁型磁电传感器则很好地克服了上述动圈式传感器的缺点,同时,该传感器具有稳定、输出特性好、容易设计、灵敏度高等特点。
故该系统传感器选用动铁式磁电传感器。
2.2 数据采集设计
数据采集器负责采集各震动传感器的微电压信号,再对信号进行放大、滤波与AD采样。然后采集器的微处理器把当前采样时间信号和AD采样值按既定协议封装成一帧数据上传到地面计算机中。
2.2.1 高精度数据采集器AD采样电路设计
数据采集器的采样电路选用24位精度的采样芯片ADS1278,ADS1278通过8个独立的并行ADC实现8个输入通道信号的转换,每个ADC由先进的6阶斩波Δ-Σ调制器进行数据转换。同步采样速率可达144kS/s,且内置的高阶稳态斩波调节器实现了非常低的漂移和带内噪声。在62kHz带宽时信噪比(SNR)可达111dB,失调漂移为0.8μV/℃,增益漂移为1.3×10-6/℃;
AD1274支持高精度、高速、低功耗、低速四种工作模式,4种可选工作模式:高速模式为128ks/s,信噪比106dB;高精度模式为52ks/s,信噪比111dB;低功耗模式为52ks/s,31 mW/通道;而低速模式为10ks/s,7mW/通道;在经过对速度、精度与功耗的多方面对比考虑后,该系统选用高精度模式。
传感器信号调理电路由共模滤波器ZJYS51R5-2P TDK和可编程增益放大器PGA280AIPW构成,共模滤波器实现对传感器输出信号的共模噪音去除,因为在长距离模拟信号传输过程中,抑制电路的传导噪声对系统来说至关重要,一个没有噪音干扰的电路能够完整地输出传感器的真实信号,若传感线路的噪音过大,真实的传感器信号很可能被淹没或异化成其它性质的信号,使传感电路失去应有的功能。在传感器信号传播电路中,根据传输特性产生分成两类:差模噪声和共模噪声。差模噪声是当两条电源线的电流方向互为相反时发生的,而共模噪声是当所有电源线的电流方向相同时发生的。一般而言,共模是最大难题,这是由杂散电容的不当接地造成的。减小共模传导噪音的方法是在信号线或电源线中串联共模共模扼流圈进行去除,滤去共模传导噪声。ZJYS51R5-2P能够消除传输信号中的失真噪声,对于非噪音的低频传感器信号(4~600Hz微震信号)具有很好低通特性,保证输出传感器信号的真实性,在实际应用中得到很好体现。
可编程增益放大器实现对输入信号的放大再送入AD转换器进行AD转换。
2.2.2 处理器iMx6UL控制电路设计
处理器iMx6UL是整个采集仪的核心部分,它首先对传感器部分的模拟信号转换,转换成数字信号后再通过TCP/IP协议上传到微震设备主机进行信号分析。在数字信号传输之前,处理器还需要通过网络对系统时间进行同步校时,当本机通过时间同步后再对传感器数据打上时间戳进行数据上传,这样就实现了分布式传感器的数据同步,进而实现微震数据的精确定位。
iMx6UL是一个高性能、超高效处理器系列,采用先进的Arm© Cortex©-A7内核,运行速度高达696MHz。iMx6UL应用处理器包括一个集成的电源管理模块,降低了外接电源的复杂性,并简化了上电时序。每个处理器提供多种存储器接口,其中包括16位LPDDR2、DDR3、DDR3L、原始和管理的NAND闪存、NOR闪存、eMMC、Quad SPI和各种其他接口,用于连接外围设备。集成了两个10/100以太网,支持IEEE 1588协议。
2.2.3 网络通讯接口的设计
微震监测系统的传感器信号经过AD采集后进入iMx6UL处理器,处理器运行Linux操作系统,Linux系统集成了IEEE1588时间同步协议,经过IEEE1588时间校正的数据通过以太环网上传到微震监测主机。
iMX6UL上有两个以太网接口,这两个接口的差分信号一个直接来自iMX6UL的以太网管脚。另外一个来自扩展的PHY,两个10/100以太网端口完全符合IEEE 802.3/802.3u快速以太网标准。iMx6UL以太网口电路图如图4所示。
以太网口PHY物理层芯片使用LAN8720芯片。LAN8720是低功耗的10/100M以太网PHY层芯片,I/O引脚电压符合IEEE802.3-2005标准,支持通过RMII接口与以太网MAC层通信,内置10-BASE-T/100BASE-TX全双工传输模块,支持10Mbps和100Mbps。
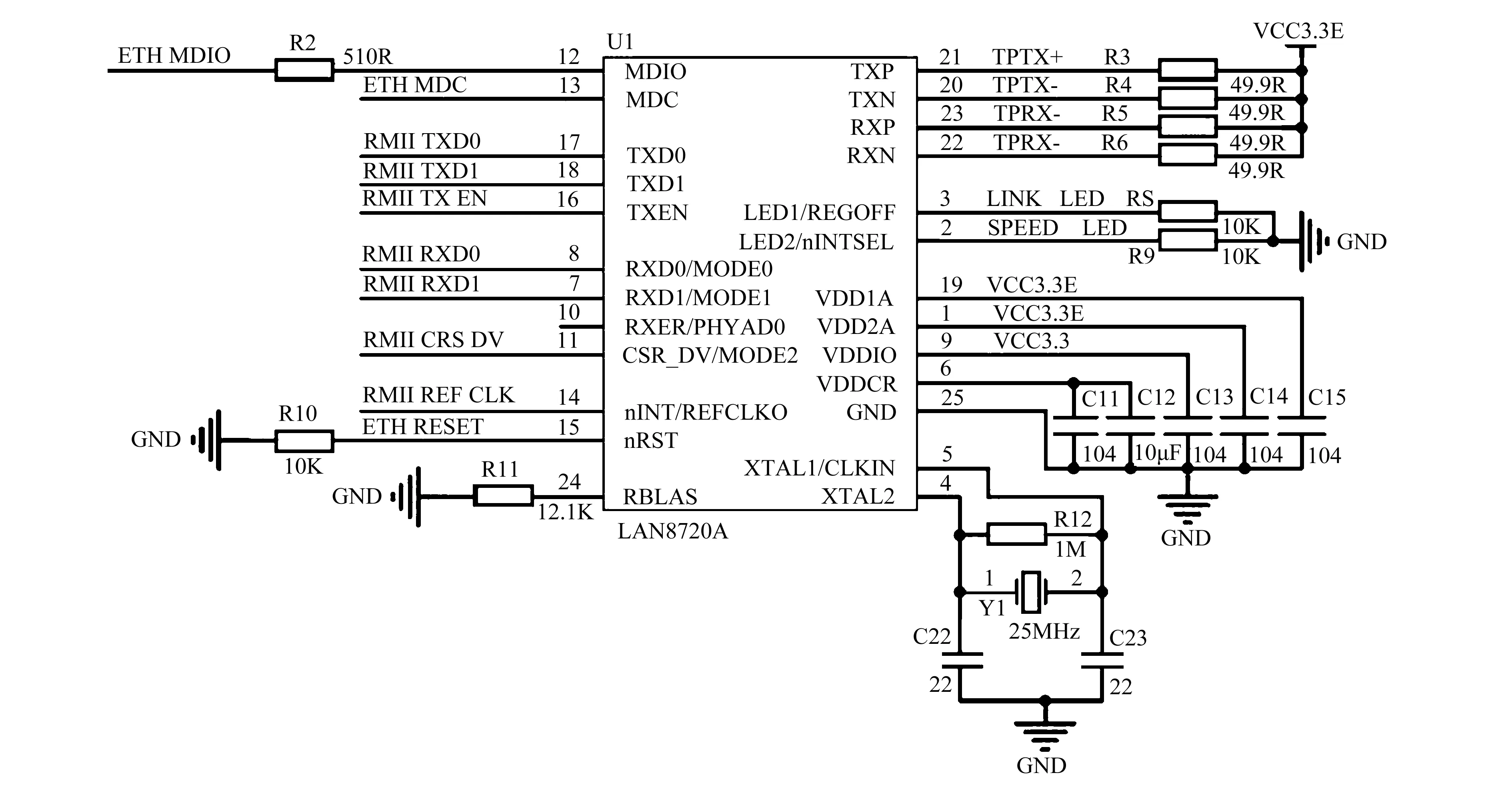
图4 iMx6UL以太网口电路图
3 软件系统设计
3.1 数据采集仪嵌入式Linux操作系统
嵌入式Linux操作系统以其内核高效稳定、源码开放、内核模块可裁剪、模块可重复利用等特点受到广大开发者的青睐。同时,Linux也集成了TCP/IP协议、PTP协议、TFP等协议,开发者只要根据需要使用就可以,不必再编写协议代码。该系统的ARM处理器iMx6UL平台移植了Linux系统,并选用了PTP协议在Linux平台,并移植了底层的PTP的驱动。
若要使用Linux操作系统在iMx6UL平台使用,需要做以下几步移植:
1)搭建交叉开发环境。嵌入式Linux的开发一般在上位机上开发,开发完成后放到目标机器上运行,因此需建立一个嵌入式Linux开发环境。
2)bootloader的选择和移植。bootloader就是在操作系统内核运行之前运行的一段小程序。通过这段小程序,可以初始化硬件设备、建立内存空间的映射图,从而将系统的软硬件环境带到一个合适的状态,以便为最终调用操作系统内核准备好正确的环境。
3)kernel的配置、编译、和移植。先将将下载好的Linux-2.6.35.tar.bz2拷贝到主目录下解压,修改顶层目录下的Makefile(主要修改平台的体系架构和交叉编译器),然后配置内核模块,最后编译内核,成功后再下载到目标机使用。
4)根文件系统的制作。在操作系统中为了实现对文件的操作与管理,需要实现对物理介质驱动、内容存储和文件内容存储等功能,根文件的制作实现这一需要。
3.2 PTP协议及在Linux中实现
PTP(Precision Time Protocol)是一种高精度时间同步协议,可以达到亚微秒级精度。它的主要原理是通过一个同步信号周期性地对网络中所有节点的时钟进行校正同步,可以使基于以太网的分布式系统达到精确同步,IEEE1588 PTP时钟同步技术也可以应用于任何组播网络中。
1588协议中,定义了两种报文,事件报文和通用报文;事件报文时间概念报文,进出设备端口时打上精确的时间戳,PTP根据事件报文携带的时间戳,计算链路延迟。事件报文包含以下4种:Sync、Delay_Req、Pdelay_Req和Pdelay_Resp。通用报文:非时间概念报文,进出设备不会产生时间戳,用于主从关系的建立、时间信息的请求和通告。通用报文包含以下6种:Announce、Follow_Up、Delay_Resp、Pdelay_Resp_Follow_Up、Management和Signaling,目前设备不支持Management、Signaling报文。
时钟同步的实现主要包括2个步骤:
1)建立主从关系,选取最优时钟、协商端口主从状态等。采用最优时钟算法选用本地网络中的最佳时钟作为主时钟,同时决定本地时钟所处状态。
2)通过计算主从时钟偏移量和网络延时修正从设备时钟。同步的过程中需要计算主从时间差异,其中包含主从钟的偏移量和网络传输时延。因此从时钟的修正也包含偏移量的修正和传输时延的修正。
IEEE1588的实现可以纯软件与硬件两种方式实现时间戳方案。纯软件方式时钟同步精度低于硬件方式。iMx6UL以太网MAC层集成了IEEE1588的硬件单元,为PTP协议的实现提供硬件基础。
在Linux系统上实现PTP协议功能,首先设计iMx6UL网卡硬件驱动(支持PTP功能);然后在Linux内核移植PTPD程序,该程序包含了最佳时钟算法程序bmc.c;协议引擎代码程序protocol.c,ptpd.c;以及一些数据定义文件等。
移植成功后,iMx6UL启动数据采集、网络校时功能,实现高精度数据上传。
4 系统测试
该系统设计完成后在山东淄矿集团唐口煤业5307工作面和630大巷进行了一系列测试。5307工作面安装4个传感器并连接到1号数据采集器,630大巷安装3个传感器并连接到2号数据采集器。1号数据采集器和2号数据采集器都连接到光纤环网上,传感器数据经过光纤环网上传到地面计算机。微震监测系统现场安装位置如图5所示。

图5 微震监测系统现场安装位置图
从微震监测传感器监测的波形数据可以看出,AD数据采集本底噪音小,原始数据干扰少,对现场微振动信号响应灵敏,信号曲线清晰明显。
该系统微震信号拾取采用长短窗算法,定位算法有经典的geiger方法、线性定位算法、牛顿迭代法和震源扫描算法等。经典的geiger定位算法对初值的依耐性较大,因为方程组的稳定性、方程解的收敛性与方程本身有关。震源扫描法是指在指定的时空域内逐时刻逐点计算其所对应的亮点值,并构成亮度图谱,最后通过一定评判标准从图谱中定位震源位置。该系统采用了修正的震源扫描法。实际系统安装完毕后,通过实际放炮测试效果见表1。
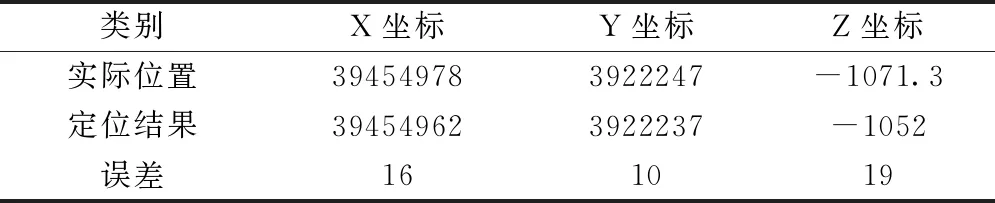
表1 微震定位对比表 m
表1结果显示,该系统定位误差小,精度高,满足矿井冲击地压监测需要。
5 结 语
设计了由磁电传感器、数据采集仪与计算机构成的微震监测系统。磁电传感器拾取煤矿现场震动信号后传递给网络数据采集仪,网络数据采集仪同时对6路传感器的信号进行AD量化采集,在本系统IEEE1588的同步机制下,各数据采集仪根据同步机制把同一时刻的数据送入光纤环网,环网中的地面计算机接收网络中的数据后进行数据分析,识别出异常数据后并打包存储。当得出一系列符合微震窗口算法需要的数据后,调用后台的定位算法软件,得出目标位置信息。系统经过实际应用测试,数据采集准确、噪音小、抗干扰能力强,系统同步误差小,定位精度高,满足冲击矿井监测需要。
