基于可穿戴设备的室内定位技术研究
2020-06-19苏春芳
苏春芳
GPS(Global Positioning System)是一种准确的定位技术,广泛应用于室外定位,但是由于室内环境会影响卫星信号的接收,使得GPS很难做到准确的室内定位.因此,准确、可靠、便携的室内定位系统成为当前研究的热点.目前室内定位技术主要包括RFID(Radio Frequency Identification)、BLE(Bluetooth Low Energy)、无线WIFI、ZigBee、运动传感器(Motion-Sensor)、图像等.文献[1]充分考虑到智能手机内置的WIFI 接收模块,利用信号加权欧氏距离进行指纹匹配和位置估计,开发设计一套基于WIFI 信号的室内定位系统.文献[2]使用RFID技术实现室内、室外的准确定位,另外随着低功耗蓝牙(BLE)技术的成熟,出现了应用IBeacon 实现室内定位的研究[3].还有基于机器视觉技术,应用深度摄录机或者第一视角摄录机进行室内定位的研究[4].室内定位系统不仅要兼顾对使用者隐私的保护,还要考虑定位设备使用是否便捷的问题.非临床条件下,在对居家老人照顾、护理的领域中,更需要考虑以上两个方面的因素,一般情况下,被照顾者不喜欢佩戴复杂的设备,所以经常会出现人与设备分离的情况.针对以上问题,本文提出一种基于可穿戴式设备(智能手环)的室内定位方法,融合手环内置的传感器(蓝牙、加速计、陀螺仪)信息来实现室内定位.
基于手环进行室内定位的挑战在于蓝牙信号的不稳定性,由于蓝牙信号容易受到室内金属材料、无线设备、室内结构的干扰,这些干扰因素将引起信号强度(Received Signal Strength Indicator,RSSI)的波动,致使信号强度与物理距离之间是一种非线性关系.另一方面手环与接收器之间的方向也会引起RSSI 的上下波动,进一步加剧了定位的难度.
针对RSSI 与物理距离之间的非线性关系,本文挖掘手环欧拉角与RSSI 之间的关系,建立RSSI 损失的补偿模型,并在此基础上,融合RSSI 特征与环境信息(手环方位特征)建立训练数据集,进而应用随机森林算法建立室内位置的分类模型,并设计有限状态自动机对定位结果进行校正.
1 相关工作
1.1 系统结构
本系统主要包含机器学习和在线测试两个阶段,在离线学习阶段,采集手环内置的蓝牙、加速度、陀螺仪传感器的信息,进而对蓝牙RSSI 进行信号补偿、滤波,最后抽取特征值,建立训练样本数据集.室内定位会受到室内建筑结构的影响.因此,本文以房间为单位进行定位区域的划分,在每个房间内安装可以持续不断接收蓝牙信号的基地台,在云端服务器应用有监督的分类算法(随机森林)建立室内定位的分类模型.
在线测试阶段,一方面将采集的实时数据送入分类模型,得到分类结果;另一方面增加对定位结果的修正机制,在对室内物理布局已知的基础上,应用已有的先验知识建立有限状态机,进而对定位结果进行修正,得到准确的室内位置信息,系统结构如图1 所示.
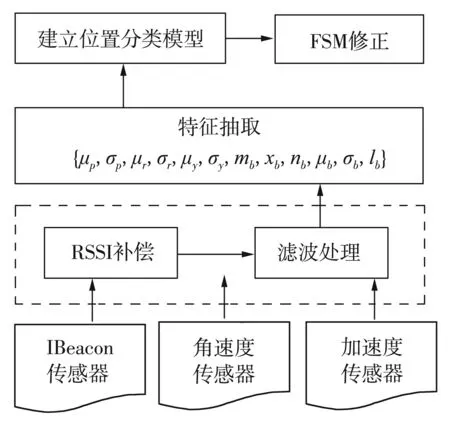
图1 系统结构图
1.2 信号补偿与滤波
基于RSSI 的室内定位方法,一般都是依据RSSI 值估计信号的欧氏距离,进而估计观察点到基地台的实际距离,常用的方法包括三角定位[5-6]方法和基于位置指纹库[7]的分类方法.但是由于室内环境的复杂性,蓝牙信号在传播过程中容易受到环境因素的影响,如噪声、信号反射、信号衰减等因素都能引起RSSI 上下波动,造成信号欧氏距离与实际的物理距离不一致的问题,进而影响室内定位的准确性.文献[1]针对WIFI 信号欧氏距离不能很好地反映各位置点间物理距离的问题,在每个参考点处采集东、南、西、北四个方向的信号强度观测值,使用信号强度的均值和方差表征WIFI 的信号强度.本文采用的是融合方位角与信号强度,应用中值滤波与信号补偿相结合的综合数据处理方法.
为了方便使用,硬件设备选用的是高登智慧科技公司的智能手环,手环内置蓝牙信号发射模块,定时向外发送蓝牙广播数据包,而部署在室内天花板上的蓝牙基地台则是蓝牙接收模块,实时接收蓝牙信号.一般情况下,被照顾者在室内位置的变换经常是伴随着一种或者多种日常行为的发生而发生的,例如老人停留在客厅,可能会伴随看电视或者读报纸等行为;老人从卧室移动到客厅的过程中,会伴随着手部前后有规律摆动的走路行为.被照顾者在从事日常行为的过程中,手腕会呈现一定的变化趋势,微观表现为手腕方位角的不断变化,例如原地踏步走,手腕前后有规律的摆动,会引起陀螺仪采集到的x轴、y轴、z轴的信号值呈现一定的变化,如图2 所示.
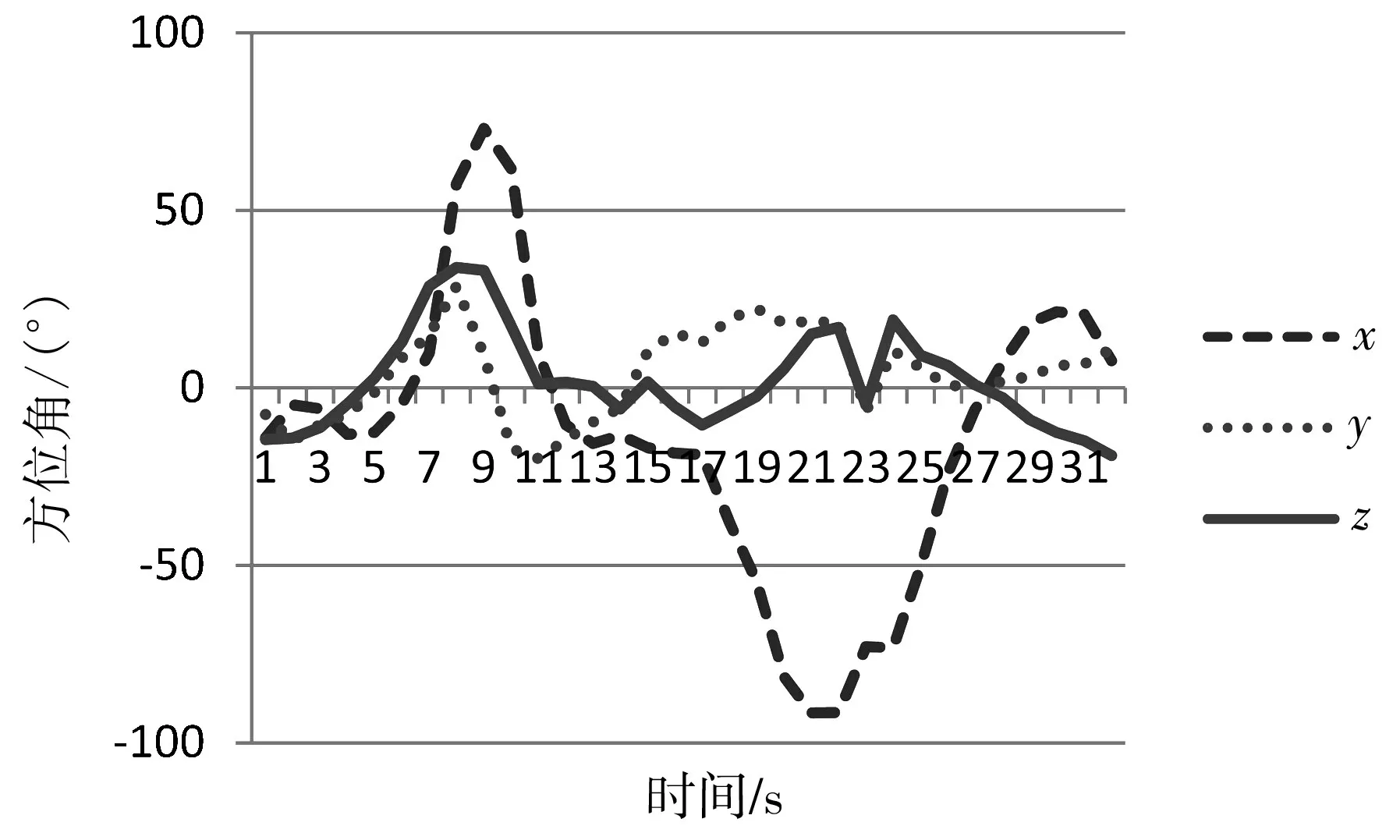
图2 手腕方位角的变化趋势
引起蓝牙接收RSSI 上下波动的因素有两个,一是手腕的转动和前后摆动,会改变蓝牙发射器与接收器之间的方向,另外在人们从事日常活动过程中,会出现身体对蓝牙信号的遮蔽,从而引起蓝牙信号的绕射、反射,甚至丢失;二是室内建筑布局、物品的摆放也会引起RSSI 的上下波动.当室内位置固定不变,仅改变手腕的方向角,RSSI 也会出现一定范围的上下波动,甚至数据丢失现象,如图3 所示.为了去除噪声的干扰,本文采用中值滤波对蓝牙信号进行滤波[8-10].中值滤波是一种非线性数字滤波器,用于图像或者数字信号处理取得了良好的滤波效果.本文考虑到被照顾者移动的速度,以及定位的实时性,将滑动窗(Slidewindow)设置为5 s,重叠(Overlab)设置为4,这样可以有效地去除丢包、绕射对RSSI的影响.综合以上两个引起RSSI 波动的因素,建立信号补偿与滤波方法,去除卷积噪声(Convolutional Noise)和 加 性 噪 声(Additive Noise)的影响,继而得到稳定、可靠的样本集.
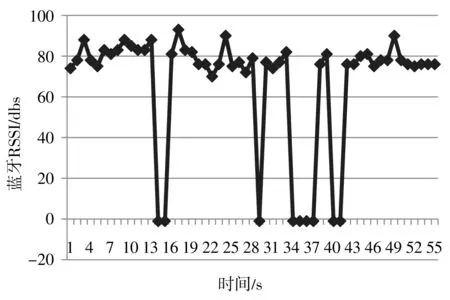
图3 RSSI 原始数据
1.3 特征抽取
考虑到环境因素对蓝牙信号强度的影响,本文融合RSSI 特征值与环境特征值,不仅抽取RSSI 的特征值,还要抽取手腕方位角的特征.手环以秒为单位向外发射蓝牙广播包,蓝牙接收器会接收到处于其接收范围之内的手环所发出的广播包,在这些数据包中,包含手环编号BandId、RSSI、时间戳三部分重要信息.蓝牙接收器对以上数据包进行重新编码,将自己的编号BridgeId 添加到数据包的首部,重新生成一个新的、长度为36 字节的数据包(见图4),然后通过无线网络上传到云端服务器.以房间为单位,在每个房间的天花板上安装一个蓝牙接收器,接收器的数量记为m,假设共有n位右手手腕佩戴智能手环的使用者,则云端服务器每秒钟收到蓝牙数据包的数量num∈[1,m×n).通常情况下,手环与接收端之间的距离,以及身体的遮档等因素会造成蓝牙信号的丢失,因此收到的数据包的数量远远小于m×n.另外蓝牙基地台之间的距离也会影响数据包的质量,如果距离太远,所有的接收器都收不到广播包;如果距离太近,则会出现各个接收器收到的RSSI 值相同或者相似的情况.针对以上问题,根据我们实验环境,手环的发射距离d配置为4 m,各个基地台之间距离Dij∈[3 m,4 m].

图4 网络数据包内容
借鉴航空领域对飞机姿态的描述,本文对手腕方位的描述是通过计算欧拉角实现的,分别计算翻滚(Roll)、俯仰(Pitch)、偏摆(Yaw).收集手环内置加速度、陀螺仪的数据,分别记为:,其中l=1,代表x轴;l=2,代表y轴;l=3,代表z轴;n=30,采样频率是30 Hz.基于以上原始数据,分别计算翻滚、俯仰、偏摆,算法如下所述.

2 分类模型构建
2.1 随机森林(Random Forest,RF)
随机森林是由多棵决策树组合而成的分类模型,被广泛应用于各种预测、决策领域中.构建随机森林的过程就是对训练集(Training Data)进行学习、建立多棵决策树的过程.随机且有放回的从训练集中抽取N个样本,组成每棵决策树的训练集,经过以上随机抽样使得每棵决策树的训练集都是随机的、不同的.在机器学习过程中,最大程度地生成每一棵决策树,并且去除剪枝过程,通过以上两种策略,大大减少了随机森林陷入过拟合(Overfitting)的情况,从而增强了模型抗噪的能力.另外RF 的随机抽样过程还包括随机抽取特征值,使得每棵决策树只使用了部分特征和部分训练样本;在分类决策过程中,每棵决策树都会产生一个分类结果,而最终的分类结果则是通过投票决定的,因此随机森林具有高效、无偏估计的优点[11].训练样本集的不同,致使RF 中的每个决策树都有不同的分类模型,即便是同一个样本,经由不同的决策树,也会产生不同的分类结果,每棵决策树的分类准确率可能不是很高,但是综合这一群决策树的分类结果,就可能得到更理想的分类结果,从而提高分类的准确率.
2.2 有限状态机(Finite-State Machine,FSM)
室内位置的变换受到建筑布局的限制,本文采用有限状态机来描述室内位置变换的关系,依据室内各个房间的布局,建立状态迁移模型,将有限自动机定义为一个五元组(Σ,Q,q0,δ,F)[12],其中:
Σ=(a,b,c),有限输入字符集合;
Q={等待状态,客厅,厨房,卧室};
q0:初始初态;
δ:状态转换关系;
F:最终的状态F∈{客厅,厨房,卧室}.
状态迁移关系δ如表1 所示,在本文的实验环境中,从卧室移动到客厅必须经过开放式的厨房才能到达,依据卧室与客厅不相通的先验知识,对室内位置进行校正.依据前一时刻的位置,校正当前时刻的位置信息,对位置序列中{卧室,客厅}或者{客厅,卧室}的情况进行校正,例如分类模型的输出是“acbbaca”,经过有限自动机处理后,位置序列校正为:客厅→客厅→厨房→厨房→卧室→卧室→卧室,描述的是一个从客厅到卧室的位置变换过程.
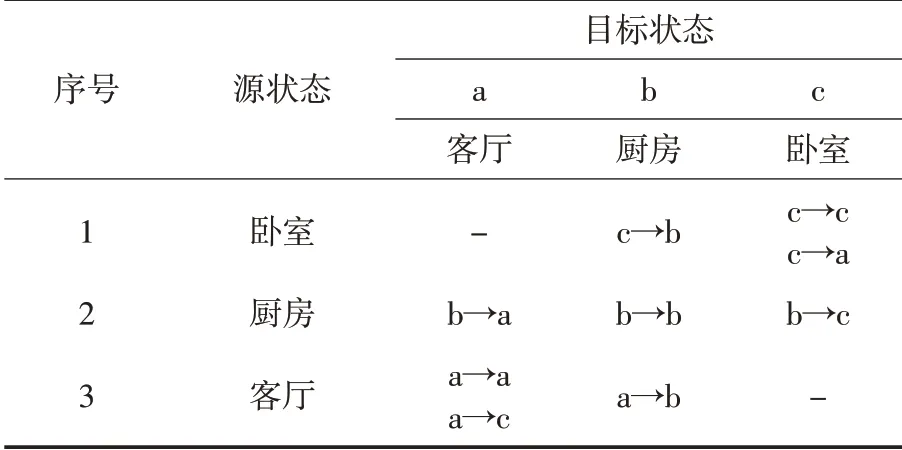
表1 状态迁移关系
3 实验结果
对原始数据进行滤波处理,去除卷积噪声和加性噪声的影响,进而得到稳定、可靠的样本集,收集时长为1 分钟的原始数据,总共收集60 个数据包,其中丢失18 个数据包,丢包率为30%,经过对蓝牙信号进行补偿、滤波,得到较为稳定的数据集,如图5 所示.
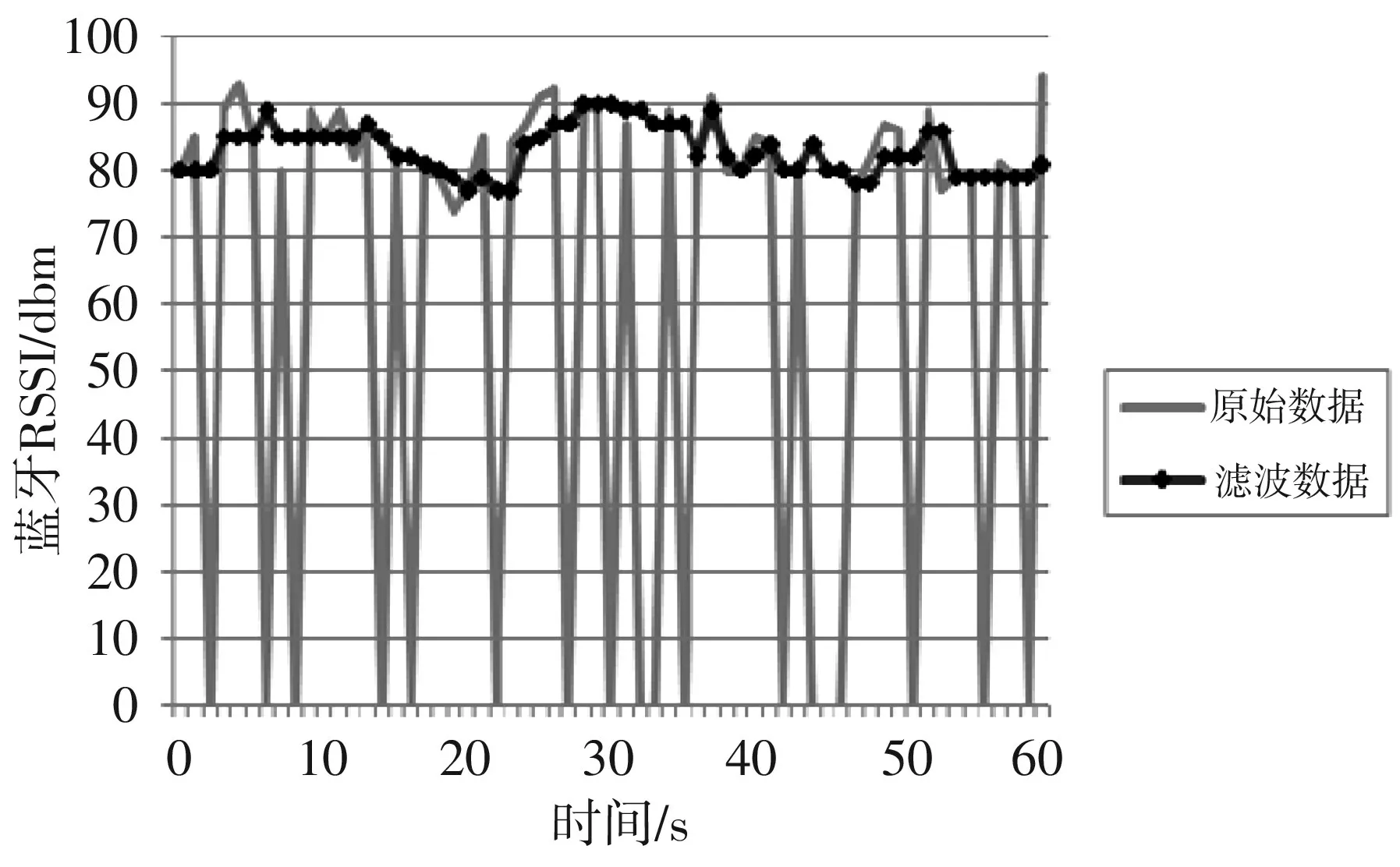
图5 数据包预处理结果
本文在线收集传感器信息,经过滤波、特征抽取后,生成由807 条有效数据记录组成的测试样本集,将该样本集送入分类器,得到最初的分类结果,然后通过有限状态机对分类结果进行调整.当实验者在“客厅”时,系统共收集到203 条有效数据,仅有7 条被误分为“厨房”类,其余记录都被分到“客厅”类,产生上述分类结果,主要是因为开放式的厨房增加了客厅与厨房的连通性,蓝牙信号经过绕射、反射,到达了“厨房”的接收器,因此被误认为实验者的位置是“厨房”;而当实验者位于厨房位置,3 条记录被误分为“客厅”类,1条记录被误分为“卧室”类,主要是因为厨房位于客厅与卧室之间,蓝牙接收器之间的距离相对较近而引发的;当实验者在“卧室”时,收集到的有效数据有349 条,仅有4 条被误分到“厨房”类,其余都被分到“卧室”类,原因是卧室仅通过门与其他区域相连,墙壁的阻挡可以有效地减少蓝牙广播包到达其他区域接收器的几率.
系统的准确率(Accuracy)、精确率(Precision)和召回率(Recall)计算见公式(5)、公式(6)、公式(7),其中TP表示真阳性(True Positive),TN是假阳性(True Negative),FP是假阳性(False Positive),FN假阴性(False Negative),本系统平均准确率和召回率分别为98.2%和98.1%,各个区域的精确率和召回率如图6 所示.
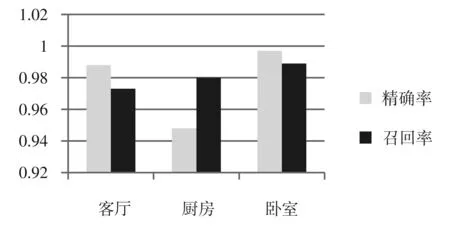
图6 系统分类性能
4 结论
基于便捷的可穿戴设备——智能手环,设计综合了信号补偿与滤波方法对蓝牙信号进行预处理.一方面基于滑动时间窗模型抽取RSSI 的特征、环境特征;另一方面应用随机森林算法建立室内位置的分类模型,并设计有限状态自动机对定位结果进行校正.在线测试实验证明,本文提出的室内定位方法能有效地实现室内的定位,准确率可达到98.2%.