基于机器视觉的机器人工件定位系统研究及实际应用
2020-06-15郭军
郭军
(山东电子职业技术学院,山东 济南250200)
1 视觉定位系统概述
在工业机器人领域,以往的机器人无法以自动化的方式完成工作,操作对象的开始与终止位置有着非常严格的要求,机器人只能完成特定的操作。无法针对外部参数的变化情况开闸针对性的操作,为了使机器人具有柔性特征,完成自动化生产,保证机器人可以快速开展工作,保证生产安全,可以将视觉技术应用于工业领域,对目标物体进行快速的识别,并明确具体位置。
目前,视觉领域研究在美国和日本等国家已经进行了多年的研究,已经获得了相关研究成果,为后续学者进行相关研究提供了重要的参考。视觉传感器可以实时跟踪图像,并对图像进行针对性的处理。本文所研究的机器人视觉系统可以充分运用视觉技术,为工业机器人进行工件操作提供技术方面的支持。首先,所有采集到的图像都需要进行转化,使其成为数字图像的形式,并进行预处理,从中提取可以利用的图像信息,摒弃无关的信息,为提取图像中的有价值信息提供便利;其次,再次处理图像,经过一系列的变化和运算,对目标工件的位置进行获取;最后,向机器人控制系统实时传输有价值的信息,使其可以顺利完成后续操作。
2 视觉定位系统的组成
如图1 所示为机器人视觉定位系统,在该系统中可以通过摄像机对工件进行仔细的观察,充分展现完整的工件。在该系统中绝对不能缺少摄像机系统和控制系统的存在。摄像机系统:由摄像机和计算机共同组成,可以对视觉图像进行全方位的采集,并结合视觉图像进行针对性的计算。控制系统:以计算机为主,与控制箱进行紧密的连接,对机器人的位置进行合理的控制。所有工作区均需要进行摄像,计算机对图像进行针对性的识别,并结合跟踪特征提取有价值的信息对数据进行全面的整合,分别进行计算,这很对于机器人各环节位置的误差值可以运用逆运动学原理进行解析,最后调整机器人位置和姿势。

图1 喷涂机器人视觉定位系统组成
3 视觉定位系统工作原理
3.1 视觉定位系统的工作原理。使用专门的摄像机进行摄像,并应用最为先进的采集卡,在计算机中统一输入视频信号,并在短时间内迅速完成处理,首先,需要对跟踪号物体的局部图像进行观察,并准确提取,再建立坐标系。当学习完成后,图像卡依然可以对图像进行持续性的采集,对跟踪特征进行针对性的提取,在提取完成后对数据进行精准的识别,并准确进行计算,机器人各环节位置给定值可以通过逆运动学进行解析,最后对末端执行机构的精度进行合理的控制,对机器人的位置和姿势进行针对性的调整。
图像获取就是在计算机中统一录入采集到的数字图像数据,CCD是目前作为先进的图像传感器,已经在机器视觉中进行广泛的运用,分辨率较高,可以在第一时间快速响应,不过其在制造工艺较为繁琐,需要花费大量的制造资金。线阵CCD 相比与其他机构的CCD 结构更加简单,只需要投入较少的资金即可,可以对信号进行实时的传输,并自动进行扫描,频率响应高,以动态化的方式进行测量,并可以在低照度环境下开展工作,优势十分明显。因此,在对图像进行采集时也可以使用CCD 工业相机,将其与摄像机图像采集进行紧密融合,充分发挥两种不同采集方式的作用,并通过计算机对所有采集到的数字图像数据进行规范性的处理。工作流程具体如图2 视觉定位系统软件流程图所示。
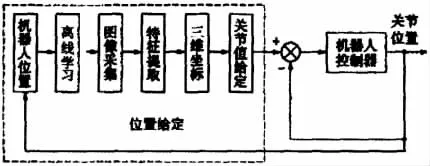
图2 视觉定位系统软件流程图
3.2 基于区域的匹配。本文以区域相关匹配方法为主。选取图像中的某一个点的灰色领域作为模板,在其他图像中针对对应点区域进行全面的搜索,从而使两幅图像可以紧密融合,提高匹配度。在基于区域相关的算法中,固定尺寸的图像窗口是匹配的主要特征。相似准则则是两幅不同图像中窗口间的相关性度量。如果经过搜索后可以找到最为相似的元素,则可以明确其是最佳的匹配对象。
3.3 图像的特征提取。工作台上的工件与工作台背景颜色存在极大的差别,黑色是工件的主要颜色,可以将这一特征作为工件识别的主要依据。
工件边缘处灰度并不是保持不变的,其会出现不同程度的变化,为判断工件边界点提供准确的依据,使其进行全方位的扫描。最后,以最小二乘法为基础确定边界点,并对其进行拟合,使其成为圆周,对圆心位置进行准确的计算。
3.4 实验与分析。实验的主要目的就是发挥机器视觉的作用,对工件的特征进行快速的识别。
在进行识别时需要结合原始图像对跟踪工件的局部图像进行选取,使其成为模板图像。
以局部图像作为模板,在原始图像中进行快速的区域匹配,并确定好原点,围绕原点建立稳定的坐标系。然后确定明确的搜索范围,结合提取的特征对区域形状进行针对性的提取,而环形区域最为符合。对全部目标特征进行搜索,并准确提取工件的特征。
该步骤与离线学习过程相似。每次使用非常方便,不需要进行反复的学习,一般一次为最合适的学习频率。通过离线学习,系统可以准确获取工件的相对位置,避免工件在识别过程中发生位置变化,保持工件的稳定性,ROI 可以准确确定最佳的位置。
随着离线学习时间的不断延长,视觉系统进行匹配后可以完成相关操作步骤,准确确定需要识别的特征。
3.5 结果分析。经过离线学习后,需要对形状特征进行提取。明确具体的特征后经过离线学习建立坐标系,对工件进行实时的跟踪,以获取完成的形状信息。只有保证离线学习的合理性,才能在第一时间确定目标特征,并获取全部的信息。
在使用图像采集卡进行图像采集时,需要对采集速度进行针对性的调整,保证每幅图都可以保持相同的采集速度。摄像头采集一幅图像大概需要20ms。对程序进行合理的优化,使图像采集和处理可以在同一时间进行,并且图像处理速度需要快于图像采集,以保证图像的真实性和稳定性,避免图像在处理过程中发生抖动。当物体运动速度低于极限速度时,可以对圆心的位置进行明确。
4 空间坐标的获取
通过观察图像可以获取完整的二维信息,程序中所有使用的坐标均以像素为单位,机器人在空间运动过程中对图像进行科学的处理,使其可以转换成三维空间坐标,在对其进行计算时需要遵循相关步骤。
机器人定位基准需要以工件圆孔的圆心为主,圆心世界坐标为A(X,Y,Z)。当圆心与视觉图像紧密融合时,就可以确定机器人的位置。
标定摄像机,准确获得投影矩阵。简单来说就是图像中的两个像素之间的距离与世界坐标系可以相互转换。
摄像机对图像进行全方位的拍摄,并根据拍摄的信息明确图像中圆心的坐标,计算与图像中心的总体偏移值。