UUV操纵性设计及流体动力布局
2020-06-12李雨田钱进军
李雨田,雷 敏,雷 阳,钱进军
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
始于20世纪50年代,UUV研究至今热潮不减,面世的UUV产品型号数以千计。美军自2000年起,每隔2年发布一版无人系统规划,到2018年共发布了8个版本的UUV系统路线图,不断调整美军UUV系统的近期、中期、长期发展目标。2018年底,美国国防部公布了最新版美国无人系统综合路线图(Unmanned Systems Integrated Roadmap2018-2042),旨在指导军用无人机、无人潜航器、无人水面艇、无人地面车辆等无人系统的全面发展,确定了无人系统未来发展的4个关键技术主题和驱动力[1-7]。国内,近几年海军机关联合船舶集团、中科院、中电集团的院所和国内高校,系统化地开展了UUV使命任务和发展路线的规划论证,已取得一定研究成果。未来,随着水下导航、通信、能源和人工智能等技术的发展,以及海洋工程和军事应用需求的牵引,UUV在民用和军事领域将展现出更广阔的发展前景。
UUV使命任务不同,搭载的载荷不同,总体配置不同,总体设计和操纵布局不同。长航程任务单一型及侦察探测精度高的任务,要求UUV平台稳定性高,以满足高精度传感器使用要求;占位攻击型及目标抵近确认型任务,要求UUV平台机动性高,以满足战术应用要求;作业操作等任务,要求UUV具备抵浪抗流能力,具备区域或定点动力控位能力。
UUV总体性能与平台的衡重设计、鳍舵布局和推进器布置密切相关。UUV鳍舵布局和推进器布置,又称UUV操纵性设计和流体动力布局[8]。主要是确定鳍舵在航行器轴向、径向及周向的相对位置。鳍舵产生一部分升力以弥补壳体升力的不足,用以平衡UUV的负浮力;鳍舵产生恢复力矩以平衡壳体的颠覆力矩;舵产生不平衡力矩,以操纵UUV改变速度矢量方向。推进器布置,指用于保证UUV按照指令完成航向、深度和速度的改变和保持的推进器布置形式。鳍舵布局和推进器布置与UUV航行的稳定性、机动性、快速性密切相关。同时,鳍舵布局和推进器布置宏观地表现了UUV外部特征,是UUV外形最显著的标记[9]。
目前,少数UUV采用扁平或不规则外形,大多UUV采用回转体外形。其原因在于回转体外形在容积一定的情况下表面积最小,可减小航行阻力与壳体用材,整体结构具有较高的强度与稳定性,耐压性能好。同时,也可借鉴鱼雷成熟的运动控制技术。鱼雷等水下高速航行器一般为大负浮力配重,航行速度范围为25~70 kn,依靠水动力平衡负浮力,直航稳定状态一般为平衡攻角小于0.5°,平衡舵角小于2°。UUV等低速航行器航行速度一般低于12 kn,中性浮力或微正浮力,其操纵性设计目标是保证低速下的操控和应对复杂海洋环境下的航行控制和环境适应性要求[10]。
UUV尚无统一标准的布放回收装置,且不受类似鱼雷发射管或导弹发射筒等标准单元的约束;搭载的设备及传感器种类多形状各异;因航速低,阻力和噪声不是影响总体性能的核心指标;诸多因素造就UUV外形、鳍舵布局和推进器布置形式多样。
本文旨在总结分析国内外UUV操纵性设计和流体动力布局的特点,划分鳍舵布局和推进器布置类型,为研究UUV总体设计及操纵性设计提供参考。
1 鳍舵布局及推进器布置划分
UUV鳍舵布局及推进器布置与航行器操纵性能密切相关,操纵性主要指航行器保持给定运动方向和改变运动方向的能力。对UUV来讲,保持运动方向还应包括在水流中保持零速度以及在水中悬停、原地定位、原地回转等特殊操纵功能的要求。
UUV常规鳍舵布局有尾部十字型鳍舵布局、尾部X型鳍舵布局、首水平舵布局、全动舵及几种布局的组合。推进器布置指单一主推进器、多个主推进器、主推进器+辅助推进器(指垂向推进器和侧向推进器)的推进类型及推进器的安装位置。参考战斗机气动布局划分方法[11],将UUV鳍舵布局和推进器布置划分为“XX鳍舵布局+XX主推进器+XX辅助推进器”,特殊布局和布置将直接给出类型。
1)尾部十字型鳍舵布局。
尾部十字型鳍舵布局具有结构简单、控制简便、可靠性高的特点,是UUV典型的布局形式。图1所示为典型尾部十字型鳍舵布局。
图1 尾部十字型鳍舵布局Fig. 1 Cross fin rudder layout of tail
为提高控制力、增加过载、提高操纵性,在尾部十字型鳍舵布局基础上增加首水平舵,或增加多个主推,或增加辅推等布置方式,组合成不同的操纵控制方案,用于提高UUV的操纵能力。
① 增加“首水平舵”。
首水平舵指在航行器首部布置一对水平舵,首水平舵能独立控制UUV纵倾和下潜。对于无纵倾下潜和上浮的潜浮运动,单靠尾水平舵无法保证操作的完成。在低于逆速的较低航速上,纵平面内只靠尾舵操纵是很困难的。另外,首舵面积几倍于尾舵面积,故舵效较高,只需较小的舵角就可产生较大的垂向操纵能力。图2所示为增加首水平舵的布局方案。
图2 增加首水平舵Fig. 2 Increase of bow horizontal rudder
② 增加“多个主推”。
布置多个主推,推进器数量为偶数,一般为2个或4个。
扁平或类扁平外形的UUV,多采用布置2个主推的方案,推进器水平布置在航行器尾部,如图3(a)所示。扁平型UUV侧向静稳定度较纵向大,单靠操方向舵,提供转向力矩往往不能满足水平面机动要求。通过控制布置在尾部的2个主推不同的转速和转向,能有效增大转向力矩。
针对小型或轻便型UUV,不布置操纵舵,采用在UUV中部水平布置2个主推的方案。作为推进力能平衡航行阻力需要,同时,为水平转向提供转向力矩。该种布局通常在UUV中部布置1个垂推,用于纵向升沉操纵控制,图3(b)所示即为该种布局。
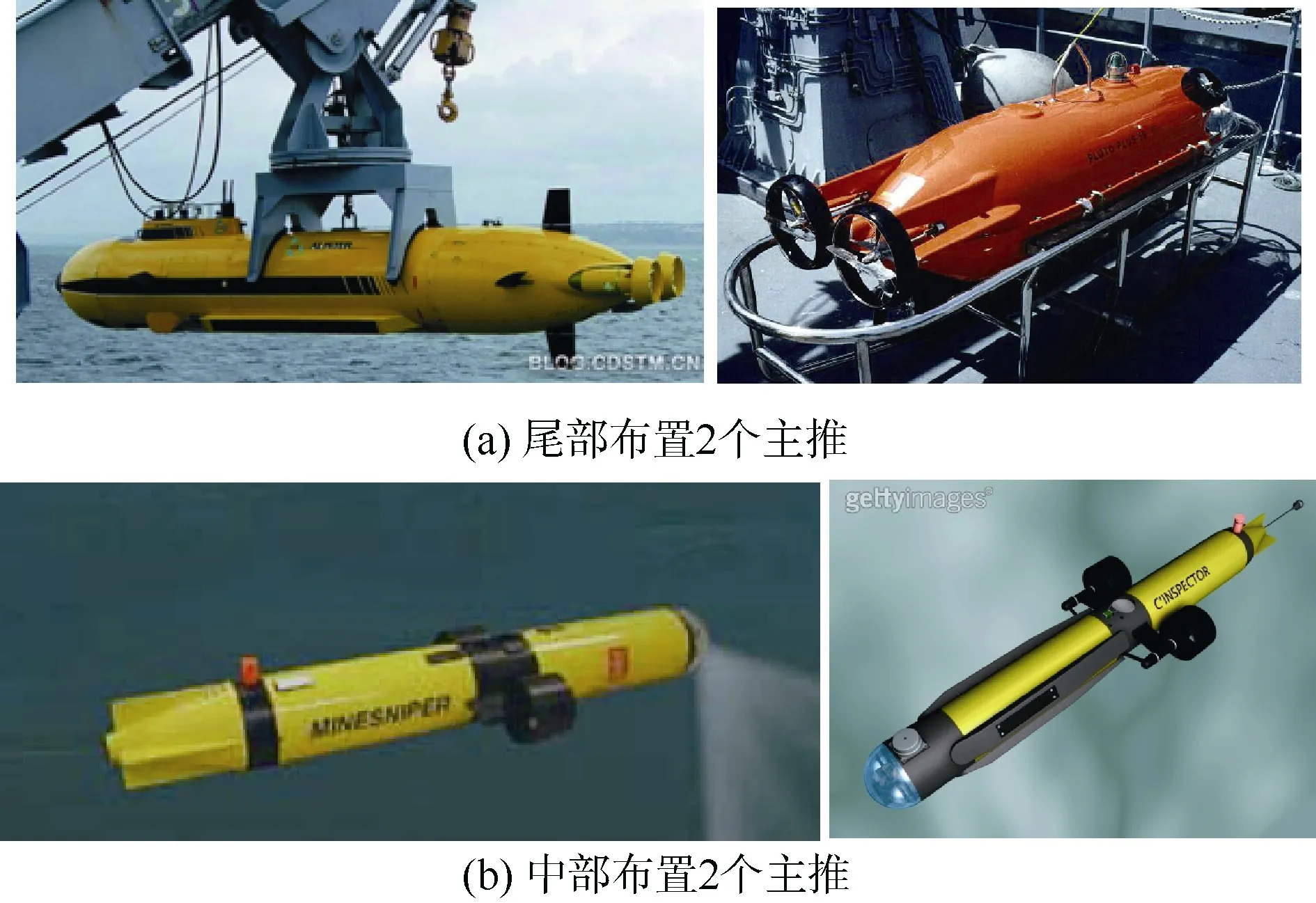
图3 布置2个主推Fig. 3 Two main thruster layout
针对携载较多或者外形较复杂的UUV,通常采用在尾部布置4个主推的方案,推进器呈方形布置,如图4所示。该方案多个主推组合产生多种推力,用以平衡复杂外形或突出载荷产生的非定常流体动力。该布局可通过操纵上下或左右2对推进器,控制不同的转速和转向,能同时提高水平面和纵平面的机动性能。
③ 增加“辅推”。
在巡航时由舵所产生的力矩或由主推进器产生的力矩都能满足操纵性的需要,而在悬停时舵无法产生力矩也就满足不了UUV操纵的需要,考虑到UUV悬停、侧移、垂移等运动模式,因此需借助辅助推进器进行操纵控制。
辅助推进器有垂向推进器和侧向推进器2种形式,分别用于纵向和侧向动力定位与推进。图5为增加垂推的布置方案。图5(a)在UUV中部布置1个垂推,主要用于纵向上浮、下潜推进,同时能辅助纵向位置定位;图5(b)在UUV尾部布置2个垂推,在首部布置1个垂推,该布局除了满足纵向动力定位、上浮下潜外,还能辅助调节UUV航行姿态。
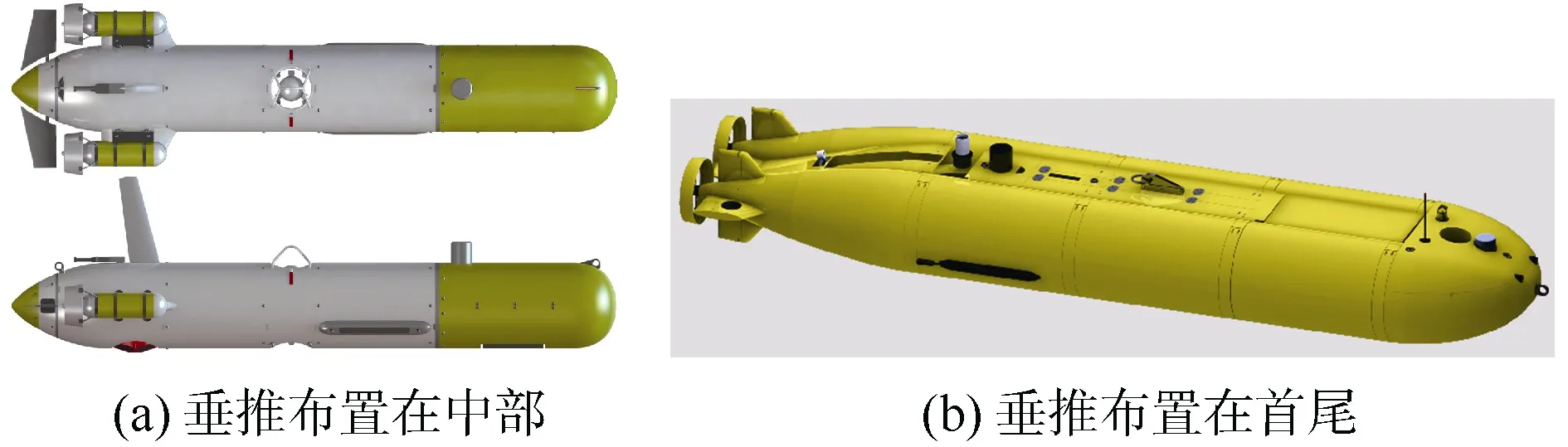
图5 增加垂推Fig. 5 Increase of vertical thruster
UUV机动性能常以水平机动能力作为衡量标准,纵平面仅需满足常规的下潜、上浮、悬停和定深等运动操控。图6所示为增加侧推的布置方案。侧向推进器主要布置在UUV首尾,远离UUV力矩重心,能提供最大的转首力矩,有效增大水平回转或机动能力,同时2个侧推也能满足水平面侧向平移推进的需求。

图6 增加侧推Fig. 6 Increase of huorzontal thruster
针对小、长、细此类型的UUV,为满足该类型UUV高机动性的要求,往往采用同时增加垂推和侧推的布局方案,图7所示为同时增加垂推和侧推的方案。在垂推和侧推的辅助推进下能够轻松实现空间六自由度高机动航行的目标。
图7 增加垂推和侧推Fig. 7 Increase of vertical and huorzontal thruster
④ 增加“首水平舵”、“主推”和“辅推”的组合。
“首尾舵布局+主推+辅推”的组合,是为了应对复杂任务需求和多工况环境要求,为提高该类型UUV操纵性,往往需组合配置多种操纵方式。
图8(a)所示UUV是一种长6 m,直径1 m,重4 t的大型水下平台。该UUV的推进系统由8个推进器组成,包括4个主推进器,3个垂直推进器和1个横向推进器;尾部布置十字鳍舵,首部布置水平舵。具备良好的多工况操纵能力,可以满足UUV在0~8 kn航速的操纵要求。
图8(b)所示UUV长度为9.7 m,宽度1.3 m,高度1.5 m,重8 t,采用锂电池或燃料电池作为推进能源。尾部布置1个主推进器,首尾布置2个垂推,首部还布置1个侧推;尾部布置三角型鳍舵,首部布置水平舵。
图8 增加水平首舵、主推和辅推的组合Fig. 8 Increase of bow horizontal rudder/main thruster/auxiliary thruster
2)尾部X型鳍舵布局。
X型鳍舵,是指4个鳍舵呈X型正交布置、舵轴中心线与UUV中对称面呈±45°夹角的尾操纵面。X型尾操纵面的可动部分称为X舵,固定部分为稳定鳍,没有固定鳍的舵即为全动舵。相比同面积的十字舵,X型舵的舵效高,低速下操舵频率低。但X型舵的操控复杂,需较高操舵控制算法。
X型鳍舵布置类似十字型鳍舵,往往也同首水平舵、多主推、辅推一起组成不同的操控方案。
图9是UUV典型的尾X型舵布局,图10是X型尾舵和首水平舵的组合布置,图11是X型尾鳍、首水平舵、2个主推的组合布置,图12是X型尾鳍、4个主推、2个垂推和2个侧推的组合布置。

图9 尾X型舵Fig. 9 X rudder of tail

图10 X型尾舵和水平首舵组合图Fig. 10 X rudder of tail and bow horizontal rudder

图11 X型尾舵、水平首舵和多主推组合Fig. 11 X rudder of tail/bow horizontal rudder/main thruster

图12 X型尾鳍与侧推、多主推和辅推组合Fig. 12 X fin of tail/main thruster/auxiliary thruster
3)矢量推进。
矢量推进除了在航向产生推力以平衡航行阻力外,还在俯仰和偏航通过转动推进器或者导流片用以改变螺旋桨尾流方向,产生法向/侧向过载,提供操纵力和力矩。矢量推进不强依赖航速,使得矢量推进在低航速下也具有极好的操控性。
图13是舵布置在导管内的矢量推进方案,类似于火箭发动机矢量推进中的燃气舵。通过控制舵偏转角度,产生相对来流攻角,使导管尾流方向偏转,进而产生在侧向或垂向的控制力。此方案需增加导管长度用于安装舵,同时,要合理布置舵转向控制机构。

图13 舵布置在导管内Fig. 13 Rudder layout in thruster
图14是舵布置在导管后的矢量推进方案。

图14 舵布置在导管后Fig. 14 Rudder layout behind thruster
图15是推进器整体偏转的矢量推进方案。该方案导管、螺旋桨和主推电机集成在一起,通过水平和垂直2个驱动电机控制推进器整体偏转,产生的推力与预置偏转角关联,通过控制偏转角控制螺旋桨推力矢量,产生所需过载,满足操纵控制要求。

图15 推进器矢量偏转Fig. 15 Vectored thruster
4)喷水推进。
喷水推进广泛应用于船舶推进,一般推力较大,与常见的螺旋桨推进方式不同,喷水推进的推力是通过喷水的水流反作用力来获得的,并通过操纵舵及倒舵设备分配和改变喷流的方向来实现操纵控制。
图16所示UUV采用喷水推进器,设有3个动叶片,尾部布置X型尾舵,航行器首尾部设置可调压载水仓。

图16 喷水推进Fig. 16 Water jet propulsion
5)多推进器组合。
不规则外形的UUV,常规操舵控制难以实现预期操纵目标,需针对自身运动方案布置推进器,用以控制UUV实现特定运动方式,比如垂向升沉运动、侧向平移运动等。针对该类型UUV,常采用多推进器组合操控方案。图17所示为多推进器组合操控方案。

图17 多推进器组合Fig. 17 Multiple thrusters
6)仿生推进。
随着需求的提高和技术的进步,许多应用场合都要求水下推进器具有流体扰动小、尾迹特征小、推进效率高、机动性好等特征,如水下侦察潜水器、浅海潜水器、鱼类活动观测潜水器等。传统的“推进器+舵”操控模式已难以满足上述需求。
仿生推进技术以其推进效率高、机动性好、结构简单、运动形式多样、可采用多种驱动方式、低噪声、对环境扰动小等优点,将成为UUV未来最具前景的操纵布局方案。图18为水下仿生推进模式的应用。
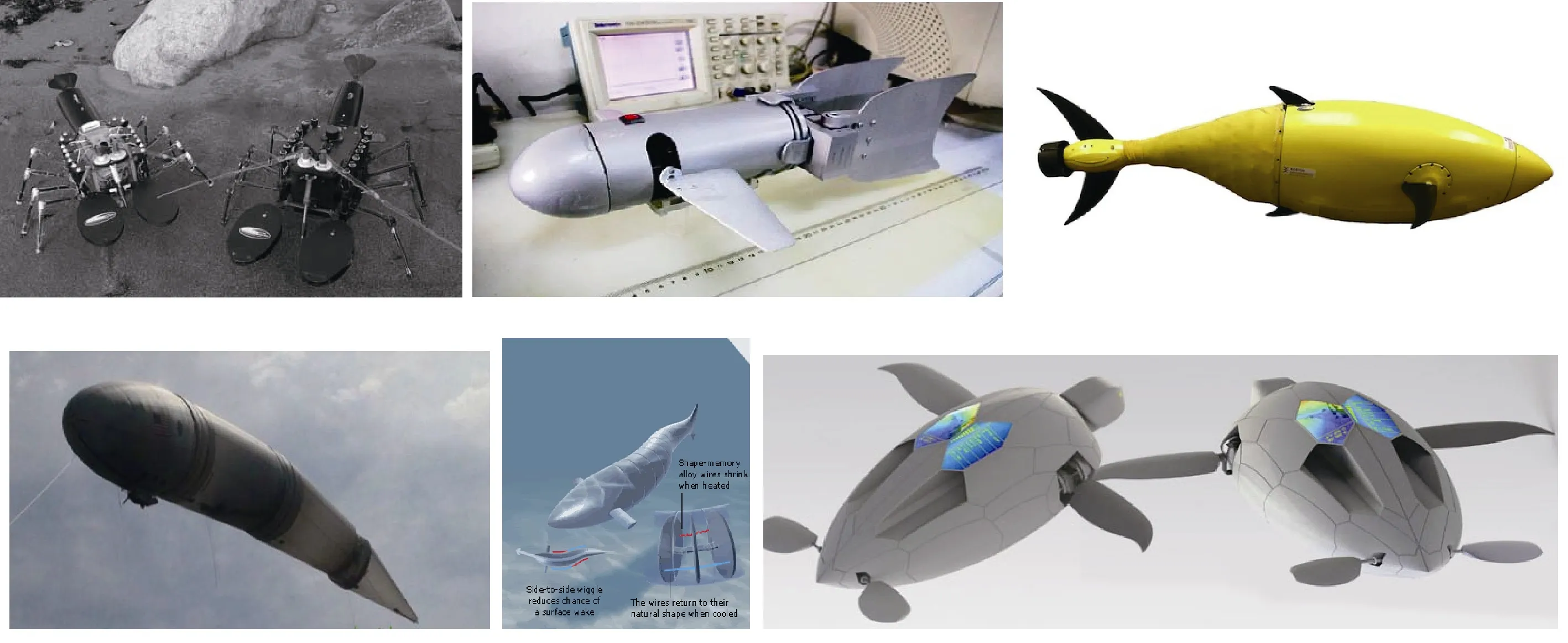
图18 仿生推进Fig. 18 Bionic thruster
2 结束语
UUV鳍舵布局和推进器布置与UUV的总体性能及操纵性强相关,本文旨在总结国内外现有UUV产品的操纵设计方案,按照“鳍舵布局+主推进器布置+辅助推进器布置”的标准划分类别,给UUV总体及操纵性设计人员提供参考。