基于多因素的城市即时配送创新模式研究
2020-06-12任新惠教授邹心彤
任新惠 教授 王 柳 邹心彤
(1、中国民航大学经济与管理学院 天津 300300;2、四川科伦实业有限公司 四川成都 610000)
引言
随着社会的进步和发展,衍生出“懒人经济”和快节奏的生活模式,我国即时配送的市场规模也随之不断扩大。根据报告显示,2017年全国完成100亿单的即时配送订单,占传统业务的25%,未来业务量将达到一半以上。但在即时配送高速发展的背后,骑手在高速行车中的安全问题、隐私泄露问题等频繁发生。未来即时配送要持续健康发展,要完善行业法律、法规建设,更重要的是与目前的配送新技术、新模式进行有机结合,优化末端配送网络。无人机在快递配送行业的应用在未来发展空间是不可估计的,无论是从无人机在未来的需求量上来看,还是从无人机相比于人力配送的配送成本来看,无人机都是未来快递业的发展趋势。
目前京东、顺丰、亿航、讯蚁、亚马逊、UPS、沃尔玛、敦豪等都在积极探索无人机配送新模式。在无人机与其他交通工具配送模式的研究中,主要包括无人机与快递员联合配送模式、无人机与基站联合配送模式。移动基站模式主要分为:无人机与车联合配送模式、空中订单履行中心模式。
随着配送新模式、新技术的不断发展,城市即时配送对时间的要求越来越高,目前缺乏对于配送需求较为集中的城市环境与物流无人机配送模式相结合的相关研究。本文总结了多种无人机组合城市配送模式及其适用场景,然后针对无人机与无人仓模式、无人机与快递柜模式、无人机与卡车配送模式三种联合配送模式进行重点研究,并在城市道路的实际约束下规划车辆及无人机联合配送路径,为未来城市的即时配送提供理论支持。
无人机城市物流配送模式分析
近年来,物流无人机配送试点普遍在乡村,迅蚁、亿航已经在城市即时配送中开始用无人机进行尝试。本文总结出几种无人机配送模式:无人机与快递员相结合模式、无人机与全自动快递柜模式、无人机与车辆配送模式,具体模式如表1所示。
由于环境的差异性以及无人机配送模式对环境的适用性,本文在城市即时配送的环境下以无人机联合配送模式为研究对象,针对无人机与卡车、无人机与无人柜及无人机与无人仓联合配送模式进行重点研究。
无人机配送组合模式对比分析方法
对于各个模式的比较分析,一般通过包裹的配送效率、配送成本、碳排放量等指标来进行各模式之间的比较,本文选取这三个指标对无人机与卡车相结合模式、无人机与无人柜组合模式及无人机与无人仓组合模式进行分析比较。要使得不同配送模式下的综合效率最高,就要使得不同配送模式的成本、碳排放量、配送效率最优,用公式表示为:

其中,Ii为某一联合配送模式的综合效益;α、β、γ分别是配送成本、碳排放量、配送时间在综合效益中所占比重;Ci、Si、ξi、Vi为不同配送方式的单位运营成本、运输距离、单位距离行驶的燃料消耗量、行驶速度;e0为CO2排放系数;i为不同配送方式,i=1,2,3;j为不同联合配送模式,j=1,2,3。
(一)无人机与卡车相结合模式
在无人机与卡车相结合的配送模式中,理想条件下,卡车可以用重心法得到卡车最优配送路径规划为一个圆轨迹。考虑到城市实际道路的影响,因此对应所选区域真实地域交通建筑状况,拟合出最接近卡车最优配送路径的现实路径,并基于此规划无人机的配送路径。具体过程如下:
重心法确定圆心。假设各配送点的重心坐标设为O(X,Y),区域内配送点的集合U={p1,p2,…}。将配送点的坐标设为pi(xi,yi),其中i=1,2,…。目标函数运输总成本C最小,即:

其中,K代表换算系数,运输费率统一为w(单位为元/km),运输距离为di。
确定卡车运行半径。以各配送点到圆面的距离和L最短为目标,求得路径圆的半径R,即:

其中,Loi为圆心到配送点的距离。
确定无人机配送路径。在碳排放量约束条件下,无人机配送路径最短,即各配送点到圆面的距离最短,假设物流配送活动中的燃料消耗量仅与运输距离相关。目标函数为完成所有配送任务中的卡车和无人机的碳排放量之和E最小,即:

其中,ζ1为卡车单位距离行驶的燃料消耗量,ζ2为无人机单位距离配送的燃料消耗量。
在配送效率约束条件下对无人机配送路径规划,要求无人机和卡车的行驶时间之和T最短,即:

其中,Mi为无人机从卡车上起飞点,pi为配送点,Ni为配送返回点,V0为卡车的行驶速度,V1为无人机的行驶速度。
规划卡车实际行驶路径及无人机配送路径。由于实际运行环境限制,需要根据所选区域的交通道路重新规划卡车行驶路径。目标函数为完成所有配送任务的总碳排放量E 最小,即:

其中,S0为卡车载无人机行驶的距离长度。
在配送效率约束条件下的无人机配送路径。同理,建立目标函数为无人机飞行时间和卡车载无人机的行驶时间之和T最小,即:

其中,T0为卡车载无人机行驶的时间。
(二)无人机与无人仓相结合配送模式
假设无人机飞行区域建筑物低于无人机飞行高度,即待配送的需求点与无人仓的两点一线的飞行:

其中,li表示无人机从各配送点到仓库的配送距离。
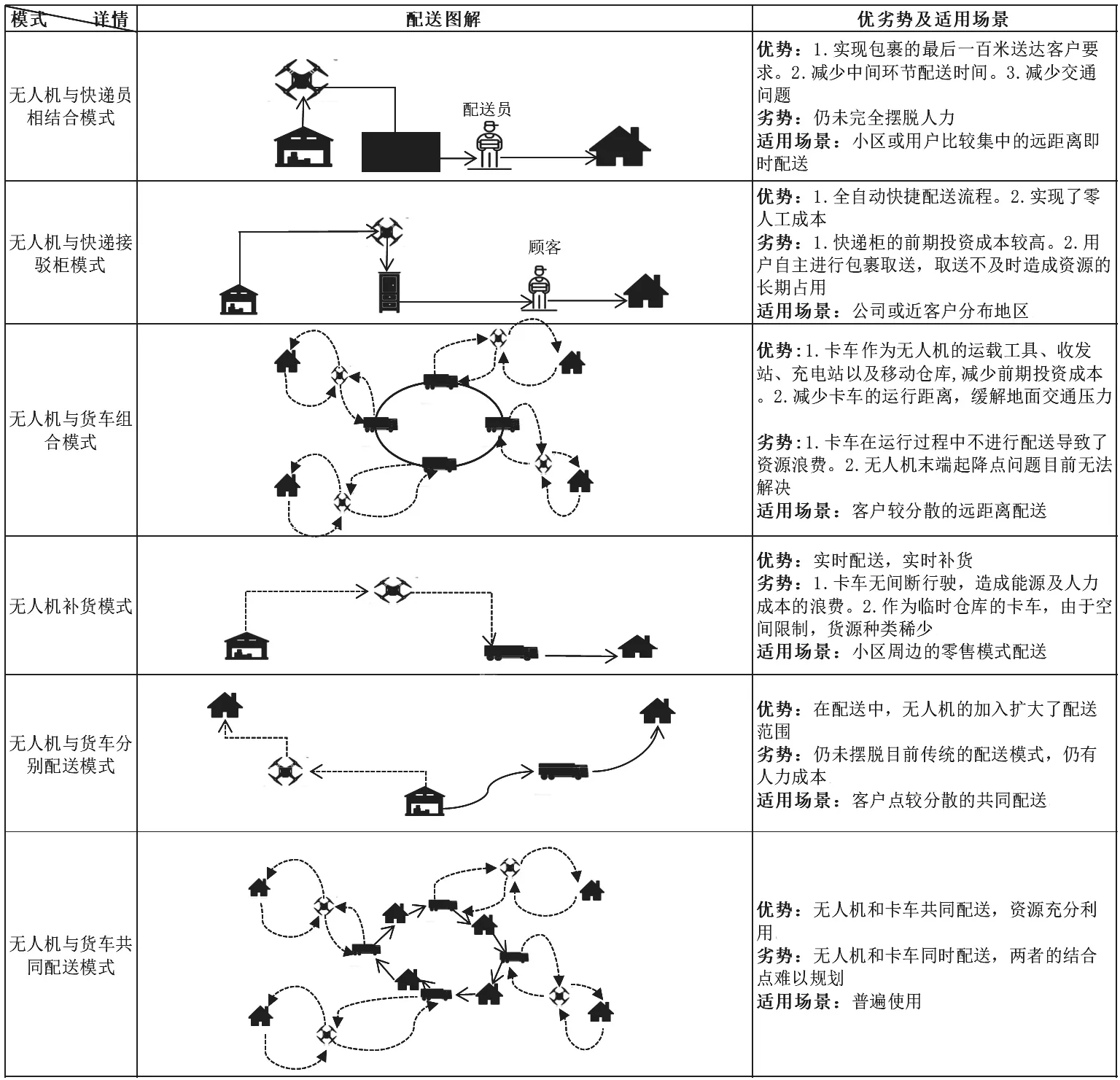
表1 无人机组合城市配送

表2 相关参数及数值

表3 四个配送模式的不同指标数值计算结果
(三)无人机与全自动快递柜相结合配送模式
将无人机配送区域进行区域划分,假设每个区域内设置一个无人柜、一架无人机进行配送。按照路径最短的原则计算无人机飞行距离和配送员补给距离,即:

其中,S为配送总距离;di为配送员到各个全自动柜的补给距离;li为各个快递柜到各个配送点的配送距离。
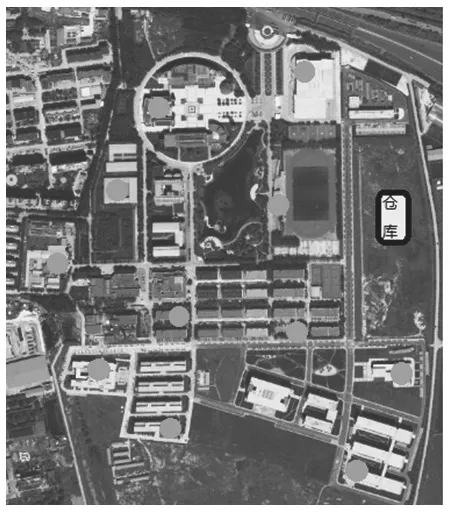
图1 卫星地图选址
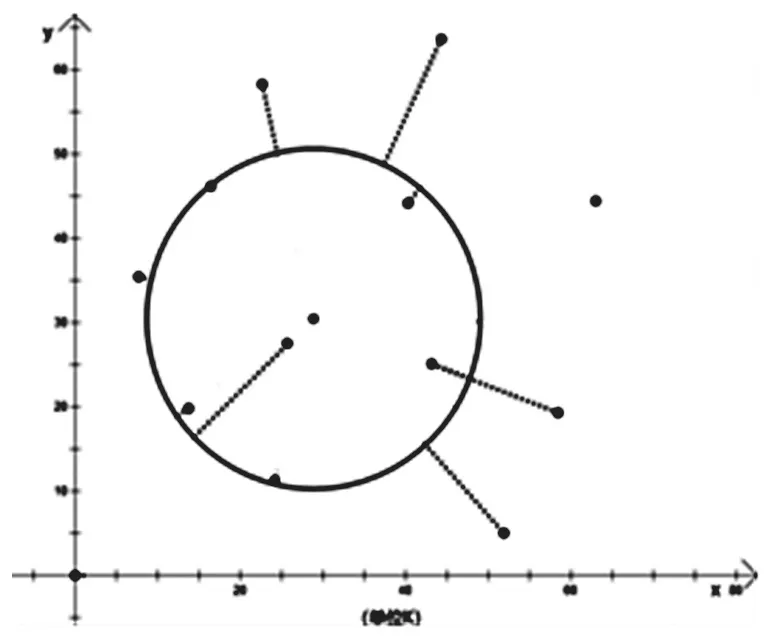
图2 在碳排放量约束条件下的无人机配送路径
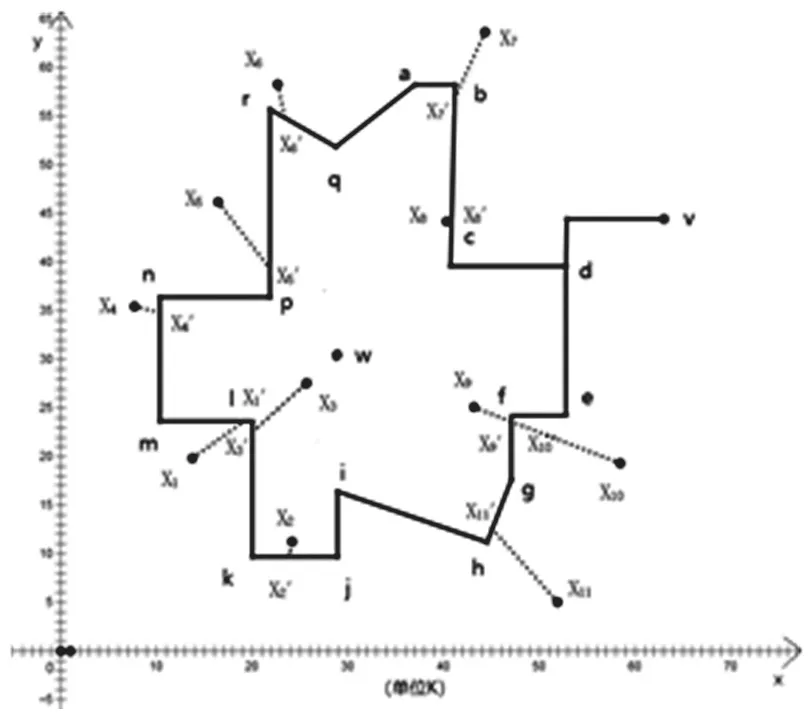
图3 卡车与无人机联合配送路径
案例分析
(一)案例背景
本文选择中国民航大学南院为场景进行无人机组合配送模拟。假设本文所选择的区域高度满足无人机飞行条件即建筑群高度低于120米,且在没有人为干预的情况下排除一切不安全因素,因此无人机不受道路交通及建筑物的影响而正常行驶。另外,假设该模型中所应用的末端小型无人机为多旋翼无人机,载重不超过2.5kg,每次只能运送一件包裹。在所选区域中选择较为分散的11个待配送的需求点,并对应到卫星地图中,如图1所示。假设仓库所在地位置固定。通过CAD绘图,确定11个待配送的需求点和仓库所在地的坐标,并在sketchpad中建立直角坐标系。
(二)卡车与无人机相结合配送距离运算
确定配送点的重心。假设重心坐标点为(1.00,1.00),为方便计算运输费率均设为1。根据公式(2)计算得出运输成本为6449.4元。以总运输成本最低为目标函数进行优化求解,求得配送点的重心的坐标点为(28.86,30.48)。此时总成本为5181.48元,与之前的总成本相比显著降低,证明优化有效。
确定卡车行驶路径。假设半径R=1.00K。根据公式(3)计算得出总距离L为2851.92m。以总距离最小为目标函数进行优化求解,此时总距离为925.8m,与之前的总距离相比显著缩短,证明优化有效,由此可确定卡车行驶路径。
确定无人机路径。确定无人机配送路径(虚线),并在直角坐标系中做出轨迹图,如图2所示。
规划卡车实际行驶路径及无人机配送路径。根据实际路面道路情况的不同,卡车(实线)与无人机(虚线)的路径如图3所示。根据公式(6)可得到在碳排放量约束条件下的无人机飞行路径最短为2605.02m。
(三)无人机与无人仓相结合配送距离运算
在卫星地图上模拟无人机配送路线。将卫星地图对应到直角坐标系中,做出无人机飞行路径,即待配送的需求点与无人仓的两点一线的飞行。分别计算配送点到无人仓的距离,配送总距离为往返距离,根据公式(8)计算得出配送总距离为5237.16m。
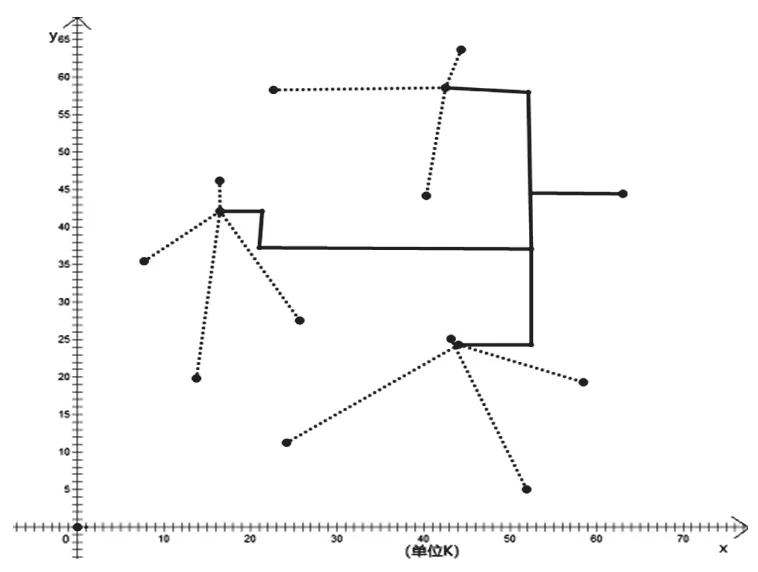
图4 无人机配送与货车补给路径图
(四)无人机与全自动快递柜相结合配送距离运算
假设所选区域根据需求量集中程度划分为三个小区域,在每一块小区域内的空地处设置一个无人柜。按照路径最短的原则,绘制坐标系中的飞行路径(虚线)、配送员行驶路线(实线),如图4所示。补给线路分为三条,不能同时进行补给,在完成一条线路的补给后进行下一条线路的补给。计算得无人机往返总距离为3737.28m。
(五)综合对比分析
无人机的运输成本目前还没有详细统计数据,以江西省赣州市南康区开展的无人机物流配送试点为例,估计单次飞行运输成本约15元,同期地面运输单件成本约23元,较现有无人机运输成本高53%。据此假设具体相关参数值如表2所示,这里仅考虑运营成本。
根据公式(1),为了综合三种指标的效应,赋予每一种指标一定的权重,计算得到三种配送模式的四个指标,如表3所示。
通过表3可知,在此区域内,无人机与无人仓、无人柜组合模式的综合效益均优于无人机与卡车组合,未来无人配送模式将以其低成本、高效率、环保而获得竞争优势。但现阶段,考虑到前期投入成本、土地占用等因素,无人机与卡车相结合的配送模式则可以应用现有基础设施,也是目前可选的主要模式。
结论
无人机联合配送模式是目前应用最广泛的一种模式,本文对其中三种联合配送模式在某一具体区域内进行研究,以配送成本、碳排放量和配送效率三个指标为对比依据进行算例分析。综合来看,无人机与无人仓相结合模式因其配送距离短而费用低、速度快、成本低,是未来的发展趋势,但目前无人机与卡车相结合模式也是一种可行的选择。本研究为无人机城市物流配送模式的实践提供方法和技术,在后面研究中会根据实际需求选择具体配送点进行研究。
无人机应用于城市的即时配送仍属于一个比较新的研究方向,无人机城市物流配送的发展还存在多方面影响因素和限制条件,如无人机配送选点、无人机城市运行环境等,都有待进一步深入研究与测试,才能确保无人机在保证安全的前提条件下进行大规模推广。
