一种基于UWB的护理机器人定位系统
2020-06-11陈新兴赵英宝刘慧贤杨雪松张运庆
陈新兴 赵英宝 刘慧贤 杨雪松 张运庆

摘要:护理机器人大部分时间在室内工作,由于室内环境比室外复杂且定位环境恶劣,因此需要具有很高的定位精度。
为了更好地解决护理机器人的定位问题,建立了一种基于超宽带(UWB)的高精度护理机器人定位系统。首先,采用基于信号到达时间的定位模型,不需标签与基站之间的时钟同步,只需3个基站时钟同步来获取护理机器人上的标签距离各个基站的位置信息;其次,将收集到的位置信息通过室内局域网传输给利用Matlab搭建的上位机系统;最后,在上位机系统内进行偏最小二乘法线性回归,再通过遗传算法进一步对数据进行优化得到精确的位置信息,并进行仿真分析。结果表明,系统的定位精度相比于TDOA模型直接定位有较大的提高,能达到护理机器人的定位要求。基于超宽带技术的定位方法还可以应用于仓储物流小车等其他室内移动设备的高精度定位。
关键词:机器人控制;超宽带;定位;偏最小二乘法;遗传算法;护理机器人
中图分类号:TP273文献标识码:A
doi: 10.7535/hbgykj.2020yx03010
Abstract:
Nursing robots work indoors most of the time,
high positioning accuracy of the nursing robot is needed due to the more complex and poorer positioning working environment indoors compared with that of outdoors.
In order to better solve the problem of the positioning system of nursing robots,
a highprecision nursing robot positioning system based on ultrawideband (UWB) was established in this paper. Firstly, there was no need of clock synchronization between the tag and the base station, and only three base station clocks were demanded to be synchronized to obtain the position information of the tag on the nursing robot from each base station by using the positioning model based on time of arrival. Then, the collected position information was transmitted to the host computer system built by Matlab through the indoor local area network. Finally, partial least squares linear regression was performed in the host computer system, and the data was further optimized by genetic algorithm to obtain accurate position information. Simulation analysis shows that the positioning accuracy with this system is greatly improved compared to the direct positioning with TDOA model, which can meet the positioning requirements of nursing robots. The positioning system based on UWB can also be applied to highprecision positioning of other indoor equipment such as the mobile dolly of warehousing logistics.
Keywords:
robot control;UWB; positioning; partial least squares; genetic algorithm; nursing robot
人口老齡化已经成为严重的社会问题[1]。在中国社会护理力量严重不足、护理行业面临着巨大压力的情况下,迫切需要护理方面的智能设备帮助对老年人的身心健康。现有的护理机器人定位技术尽管在一定的环境下有较好的性能,但是由于护理机器人大部分时间都是工作在室内,室内的环境相对室外来说比较复杂,定位环境极其恶劣,因此需要具有很高的定位精度[2]。传统的定位方式主要包括红外线定位、超声波定位、蓝牙定位、WIFI定位等。这些定位方式各有优点,但也有明显的短板,详见表1。在现有的无线定位技术中,UWB(超宽带)无线电相比于其他定位方式具有很大的优势,首先UWB信号的频谱范围比大多数定位技术的频谱范围要宽,不但具有特别小的发射功率,同时还具有极强的穿透力。经多年研究,UWB技术已经取得了一定的发展,已被应用于室内定位方案。
笔者设计了一种基于超宽带(UWB)定位的护理机器人系统,通过UWB确定位置信息,
利用Matlab的上位机环境优化数据,实现护理机器人的精确定位。
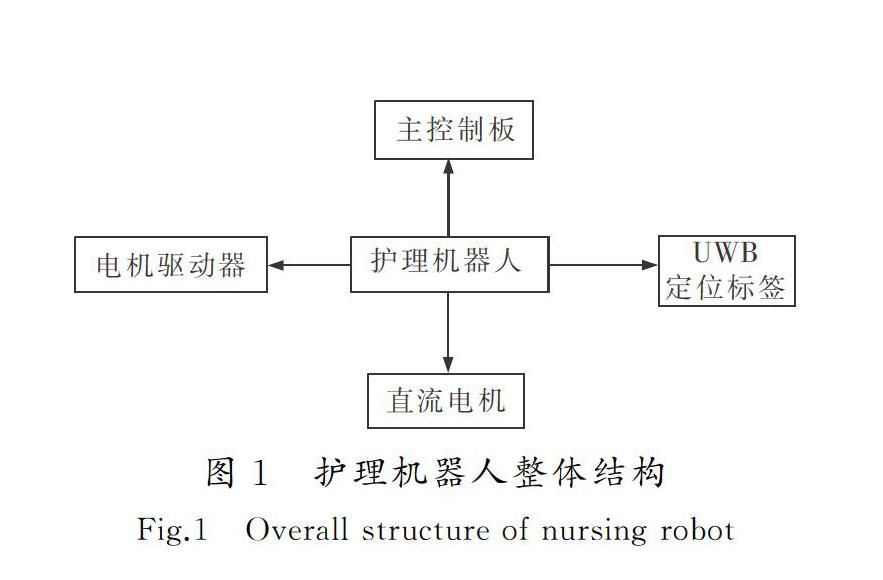
1护理机器人的整体结构
所设计的护理机器人系统包含了UWB定位系统、运动控制系统、直流电机和驱动器、无线通信系统等,如图1所示。
护理机器人本体部分主要包括可移动的底盘和外壳,底部采用大轮与小轮呈90°的全向轮来使护理机器人进行直线行驶或者进行转弯运动。护理机器人的运动控制系统以STM32F10C8T6作为核心控制器,与UWB定位系统、无线通信模块等通过RS232接口进行连接。本文主要对UWB定位系统进行研究。
2超宽带定位系统
2.1UWB定位技术
超宽带[36]是一种不使用载波的无线通信技术,它利用间隔时间(小于1 ns)极短的能量脉冲,通过调制与排序的方法将脉冲扩展到所需的频率范围内。超宽带具有很多优点,例如:传输速率高;发射功率小于1 mW就可以实现通信要求,这一点也就大大降低了对电源的要求,并且穿透能力极强,具有一定的抗干扰能力。
2.2UWB定位系统建立
建立了一种UWB定位系统,系统主要有4个基站和1个定位标签组成,本文所选用的通信模块是DecaWace公司生产的DWM1000定位模块[7]。DWM1000模块定位芯片是目前世界上
精度最高的室内定位芯片,同时有着极其强大的抗多径衰落能力,在高衰落的位置环境中还可以进行很可靠的通信。将定位的4个基站放在房间内的4个固定位置,并将标签安放在护理机器人的顶部位置,为护理机器人的定位收集原始数据。
2.3UWB定位模型建立
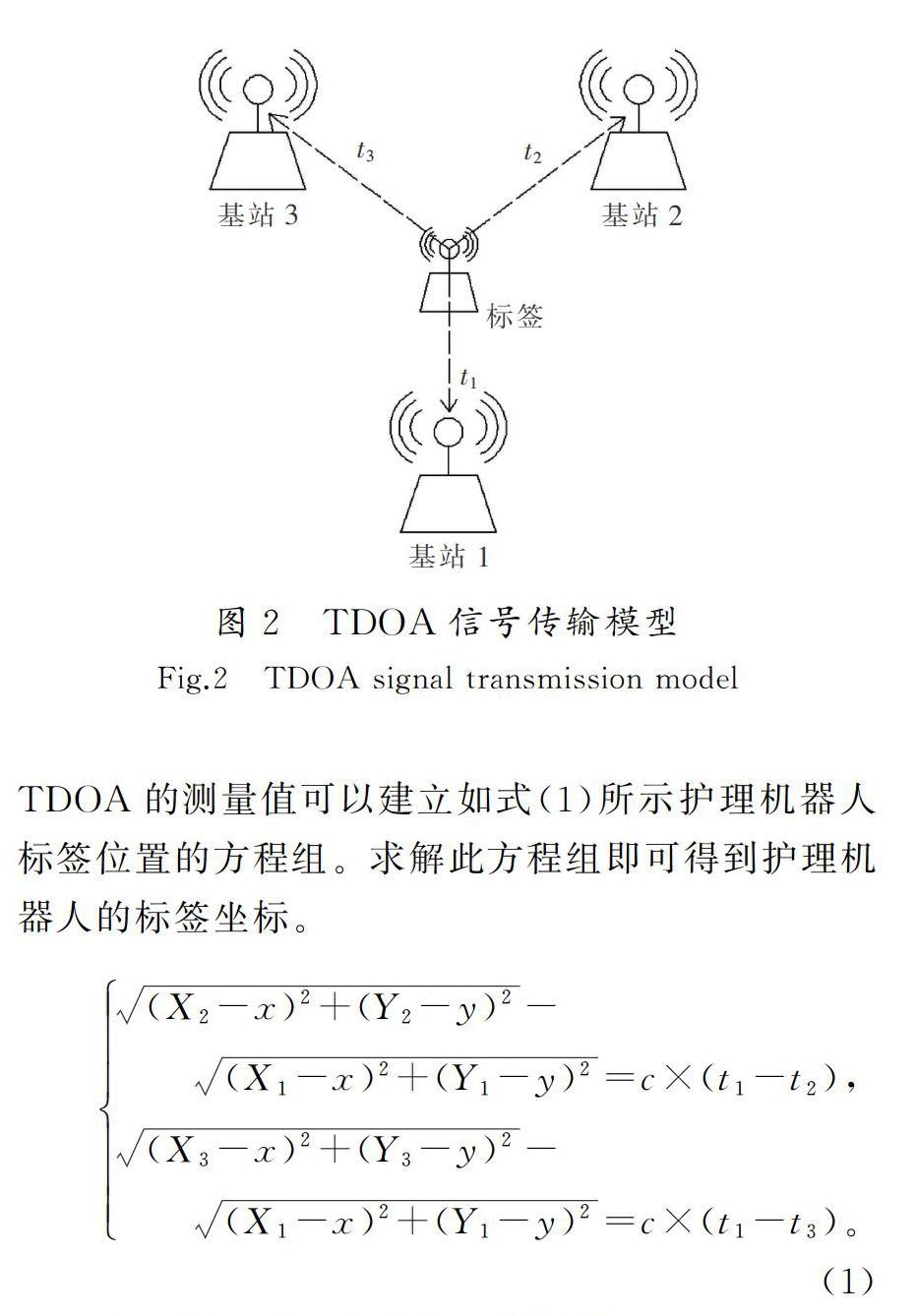
本设计采用了TDOA(到达时间差)算法[8]来求解定位标签的位置。TDOA定位方法的工作原理是通过检测UWB信号从标签到达2个基站的绝对传播时间的相差值,而不是利用飞行时间来确定标签的位置信息,这种方式降低了标签与基站时钟同步的要求。利用3个基站的方式能够得到3个TDOA,得到标签与固定的基站距离的差值。TDOA信号传输模型如图2所示。
图2中t1,t2,t3分别是指UWB信号从护理机器人标签位置到达基站1、基站2、基站3的传播时间,如果护理机器人所在位置的标签坐标设为(x,y),那么,基站1的坐标为(X1,Y1),基站2的坐标为(X2,Y2),基站3的坐标为(X3,Y3)。利用TDOA的测量值可以建立如式(1)所示护理机器人标签位置的方程组。求解此方程组即可得到护理机器人的标签坐标。
2.4基于偏最小二乘法的遗传算法
TDOA定位的方法又被称为双曲线定位方法,本文2.3节已经介绍了TDOA定位方法,如式(1)所示方程组是非线性方程组,而直接利用TDOA算法解出的位置信息误差较为严重,不足以达到护理机器人的定位精度。因此,在TDOA模型基础上提出了偏最小二乘法的遗传算法对位置信息进行研究验证,得到了更为精确的护理机器人上的标签信息。PLSGA算法的主要原理是根据偏最小二乘法[9]建立模型,通过计算得到与真实位置信息较为接近的初始位置信息,再通过遗传算法[1011]的选择、交叉、变异等一些遗传学的操作来寻找最优解,直到所需要的结果。遗传算法具有良好的全局搜索能力[12],更快地收敛于最优结果,但是遗传算法对初始种群的选择有很强的依赖性,因此,把偏最小二乘法的估计位置信息作为遗传算法的初始值而不是用隨机数去设置初始值。算法步骤如下。
1) 输入一组新测量得到的TDOA数值,通过偏最小二乘法建立回归方程,并且计算出坐标初始值信息。
3)选择操作,利用选择算子对初始种群进行处理,这种方式可以保证基因的完整性。
4)交叉操作,通过模仿生物进化过程为新的物种进行染色体交叉。
5)变异操作,用其他的基因团代替原来的基因团,通过新的基因产生新的个体,这样可以使种群保持多样性,有效避免早熟。
6)判断是否达到最大迭代次数,若没有达到,则转回第2步;若达到,将适应度的最大值的个体进行输出,算法结束。
算法流程图如图3所示。
2.5基于偏最小二乘法的遗传算法仿真分析
通过对护理机器人的定点基站3进行测试,收集测试到的数据,利用Matlab软件[15]对基于最小二乘法的遗传算法进行仿真分析,测试时基站3位置坐标分别为(0,0),(5 120,0),(0,3 560),护理机器人标签位置为(2 200,3 300)。遗传算法的参数设置分别为种群规模50,交叉率0.5,变异率0.01,最大进化代数70,仿真结果如图4—图8所示。由于偏最小二乘法对定位精度的提高很少,因此直接将PLSGA的误差与TDOA模型计算的误差进行对比。
定点测试仿真结果表明,当进化到50代时,得到了最优的适应度均值为9.4,图5可以看到,PLSGA算法更靠近真实值且集中,TDOA算法更发散。在图6和图7中可以看出TDOA直接计算的最大误差为20 cm,PLSGA算法最大误差为12 cm。在此基础上使用了如式(4)所示的均方根误差(RMSE)算法评价指标,对仿真结果进行了分析,得到了表2定点测试的RMSE。表2表明所设计的PLSGA算法提高了系统定位精度。
2.6基于偏最小二乘法的遗传算法实验测试
在上述仿真基础上搭建了实验测试平台对系统的功能进行测试,实验所用机器人底座如图9所示,在房间内放置3个基站,人工对基站位置进行测量,3个基站所处位置的位置坐标为(0,0),(0,9 000),(9 000,0)。打开护理机器人上位机系统,把基站的位置坐标输入给上位机系统,并完成上位机与护理机器人标签的通信,开始进行护理机器人的定位,重复2次并记录实验结果。改变护理机器人标签点的位置,进行2次测试,再一次改变护理机器人标签点位置并记录实验结果,结果如图10和表3所示。
3结语
通过以上分析可知,所建立的基于UWB护理机器人室内定位系统实现了护理机器人的定位。为了提高定位精度,在TDOA模型的基础上设计了基于偏最小二乘法遗传算法的联合定位算法,采用偏最小二乘法对TDOA模型测量得到的数据进行初步估计,并将其作为遗传算法的初始种群对护理机器人标签位置进行精确计算。基于UWB技术的定位方法不仅仅局限于护理机器人,还可以应用于其他室内设备的高精度定位,例如仓储物流中移动小车的定位等。
为了节约成本,本次设计中只进行了护理机器人底座的设计,没有对护理机器人的整体进行设计,本文的实验是在LOS环境中进行的,虽然进行了无迹卡尔曼滤波,但在NLOS环境中护理机器人的定位精度还是会受到一定的影响。今后还需对这些方面作进一步的改善和研究。
参考文献/References:
[1]郭冉,王俊.世界人口发展趋势和人口转变——理论与现实[J].人口与社会,2019,35(3):5263.
GUO Ran, WANG Jun.World population trends and demographic transition: Theory and reality[J].Population and Society,2019,35(3):5263.
[2]唐科萍, 许方恒, 沈才樑. 基于位置服务的研究综述[J]. 计算机应用研究,2012,29(12): 44324436.
TANG Keping, XU Fangheng, SHEN Cailiang. Survey on locationbased services[J]. Application Research of Computers, 2012,29(12): 44324436.
[3]郭丽娟. 人性化家用护理机器人护理方式及产品功能设计研究[D]. 天津:河北工业大学,2013.
GUO Lijuan. The Design and Research of Nursing Mode and Function of Humanized Household Nursing Robot[D]. Tianjin:Hebei University of Technology, 2013.
[4]PORCINO D, HIRT W. Ultrawideband radio technology: Potential and challenges ahead[J]. IEEE Communications Magazine, 2003, 41(7): 6674.
[5]LIU L, LIU Z, XIE H, et al. Numerical simulation of UWB impulse radar vital sign detection at an earthquake disaster site[J]. Ad Hoc Networks, 2014, 13(1): 3441.
[6]许哲琪. 基于无线网络的定位技术研究[D]. 北京:北京交通大学,2019.
XU Zheqi.Research on Location Technology Base on Wireless Network[D]. Beijing:Beijing Jiaotong University,2019.
[7]卢靖宇, 余文涛, 赵新, 等. 基于超宽带的移动机器人室内定位系统设计[J]. 电子技术应用,2017,43(5):2528.
LU Jingyu, YU Wentao, ZHAO Xin,et al. Design of indoor positioning system for mobile robot based on ultrawideband[J]. Application of Electronic Technique, 2017, 43(5): 2528.
[8]朱永龍. 基于UWB的室内定位算法研究与应用[D].济南: 山东大学, 2014.
ZHU Yonglong. Research and Application of the Algorithm for the Indoor Positioning Based on UWB[D]. Jinan:Shandong University, 2014.
[9]罗批, 郭继昌, 李锵, 等. 基于偏最小二乘法回归建模的探讨[J]. 天津大学学报, 2002,35(6):783786.
LUO Pi, GUO Jichang, LI Qiang, et al. Modeling construction based on partial leastsquares regression[J]. Journal of Tianjin University,2002, 35(6): 783786.
[10]韩瑞锋. 遗传算法原理与应用实例[M]. 北京:兵器工业出版社, 2010.
[11]赵宇兰. 基于退火遗传算法的多连接查询优化应用研究[J]. 山西电子技术,2018(6):9396.
ZHAO Yulan. Research on multijoin query optimization based on annealinggenetic algorithm[J]. Shanxi Electronic Technology, 2018 (6): 9396.
[12]刘奕岑,徐蔚鸿,陈沅涛,等. 具有适应度选择调整策略的混沌遗传算法及其应用[J]. 计算机技术与自动化, 2019,38(2):814.
LIU Yicen,XU Weihong, CHEN Yuantao,et al. Chaos genetic algorithm with fitness selection adjustment strategy and its application[J].Computer Technology and Automation, 2019,38(2):814.
[13]武装. 几种改进的智能优化算法及其应用[M].北京:科学技术文献出版社,2018.
[14]REYNOLDS J, REZGUI Y, KWAN A,et al. A zonelevel, building energy optimisation combining an artificial neural network, a genetic algorithm, and model predictive control[J]. Energy, 2018, 151:729739.
[15]许国根, 赵后随, 黄智勇, 等. 最优方法及其MATLAB实现[M]. 北京:北京航天航空大学出版社, 2018.
