一种新型电动助力转向系统助力转矩跟踪的控制策略
2020-06-11武国飞李媛媛吴立群陈少棠
武国飞,李媛媛,吴立群,陈少棠
(上海工程技术大学 电子电气工程学院,上海 201620)
电动助力转向系统(Electric Power Steering System,EPS)的控制是一个具有挑战性的问题,需要采集方向盘扭矩,道路反作用力,方向盘与电机的角度、角速度和角加速度,汽车车速等传感器信号输入电子控制单元,然后利用数学模型、控制算法控制电机输出合适的助力转矩,以达到汽车转向时有良好的稳定性、舒适性和轻便性。目前国内外都在进行EPS系统的研究和开发。文献[1]提出利用助力电机特性曲线计算助力电机目标电流和利用径向基函数神经网络与反向传播 (Back Propagation,BP)学习算法设计电流闭环控制器控制电机,提高了转向系统的稳定性。文献[2]提出综合前馈和模糊PID反馈的电流控制方法,提高了电流跟随控制的稳定性、快速性和准确性。文献[3]提出了一种基于小波模糊神经网络和非对称隶属度函数估计的智能二阶滑模控制方法,用于控制EPS中的六相永磁同步电机,提高了系统的瞬态响应,提高了稳定性和操作舒适性。文献[4]通过对驾驶员转向感的分析和比较实际转矩与理想转矩,提出了一种参数化的功率正弦转向曲线,相比于仿制曲线有良好的转向感,应用范围更广。文献[5]通过使用非线性摩擦补偿模块和线性干扰观测器以实时估计转向齿条力,减少了传感器的使用。文献[6]设计了助力扭矩和电机相匹配的电流控制器,对比了常规PID、改进型PID及补偿模式对转向系统特性的影响。文献[7]分别采用机械摩擦补偿器和电流控制律以及电摩擦补偿器设计了转矩控制律,使方向盘更加平稳。文献[8]设计了EPS执行器的混合H2/H∞控制策略和主动前轮转向(Active Front Steering,AFS)执行器的主动转向干预控制策略,通过两个控制器的作用可以明显的改善车辆操作的稳定性和行驶路感。文献[9]提出粒子群优化和蚁群优化调节PID参数,减少了提供给助力电机的助力电流和调节时间。但仍有一些因素不够全面,如不考虑辅助电动机的参数的不确定性,以及忽略道路反作用力对转向系统的影响。滑模控制(Sliding Mode Control,SMC)在20世纪50年代早期首次被提出,其具有良好的鲁棒性,被广泛地用来处理系统不确定性和非线性[10-11]。此外,面对滑模控制的一些缺点,积分增强滑模控制已经引入,以进一步提高滑模控制性能[12-13]。文中提出了一种新型的电机助力转矩控制,采用单轨车辆模型产生道路反作用力。利用电机角度控制电机的方法,可以把负载干扰控制在回路内。利用参考模型计算出电机参考角度,同时提出积分滑模控制来跟踪电机角度,并提高助力电机参数的不确定性,最终能很好的实现助力转矩的跟踪。
1 电动助力转向系统的动态模型
本文选择柱式电动助力转向模型来设计转向助力转矩控制数学模型。EPS的动态模型包括方向盘、转向轴、转矩转角传感器、直流电机和齿轮齿条[14-16],根据牛顿运动定律建立以下模型[15,17-19]:
方向盘与转向轴之间的动力学模型:
(1)
助力电机与转向轴的动力学模型:
(2)
齿轮齿条机构动力学模型:
(3)
由式(2)、式(3),可得
(4)
助力电机的电流电压模型:
(5)

式中:Ts为作用在转向柱上的转向力矩;Td为方向盘转矩;Tm为电动机电磁转矩;Ta为电机助力扭矩;Tr为路面反作用力矩;fr为路面反作用力;θc为方向盘转动角度;θm为助力电机转动角度;G为助力机构减速比;Jc为转向轴等效惯量;Bc为转向轴阻尼系数;Kc为转矩传感器扭杆刚度;Km为电动机轴等效刚度;Jm为电动机轴转动惯量;Bm为电动机轴阻尼系数;Kt为电动机转矩系数;Mr为齿条和车轮的等效质量;Br为齿条阻尼系数;Kr为弹簧刚度;rp为小齿轮半径;N为电机齿轮传动比;p为齿条位移;Jeq为电动机轴等效转动惯量;Beq为电动机轴等效阻尼系数;Lm为电动机电感;Rm为电动机电枢电阻;U为电动机控制电压;Im为电机电流。EPS模型参数的量化见表1。
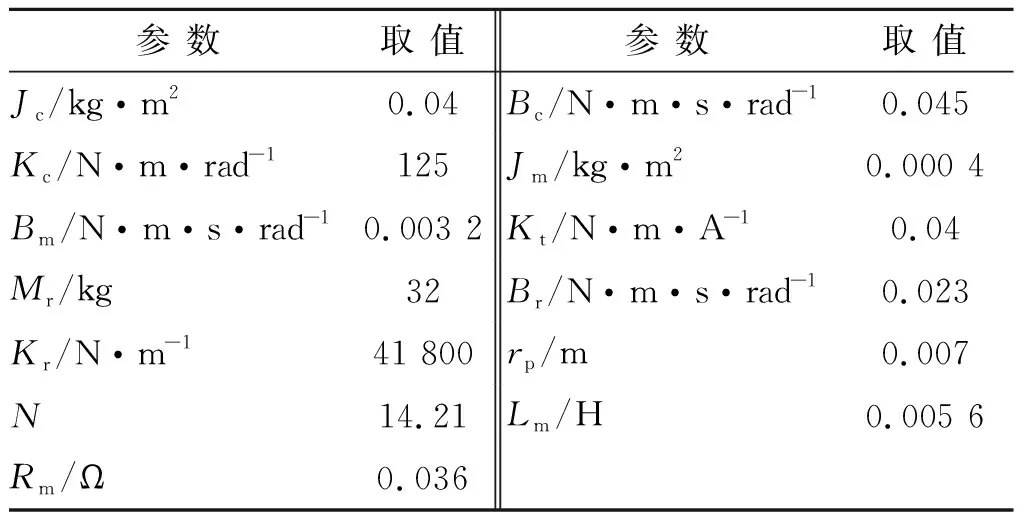
表1 EPS模型参数的量化
2 车辆模型
建立单轨车辆模型[20]用于产生作用在齿条上的道路反作用力fr,如图1所示,β为车辆滑移角,γ为车辆横摆率,V为车辆行驶速度,α为前转向角与车辆滑移角的差值。
(6)
(7)
式中:lf为前底盘长度;lr为后底盘长度;Cf为前底盘转弯刚度系数;Cr为后底盘转弯刚度系数;Iz为车辆转动惯量;δf为前转向角;Tp为后倾拖距;Gc为转向系统传动比;m为车辆质量。车辆模型参数取值见表2。
由式(6)、式(7)可得
(8)

图1 单轨车辆图

表2 车辆模型参数
3 助力扭矩跟踪控制
电动助力转向系统的组成如图2所示,系统的输入是方向盘扭矩和车辆行驶速度。EPS模型分别生成方向盘角度和电机角度,通过微分处理得到转向状态;单轨车辆模型利用输入的方向盘角度计算出道路反作用力和力矩;参考助力转矩Tar由助力特性曲线确定;以上各参数输入参考电机角度模型生成参考电机角度θmr。积分滑模控制很好的实现了助力扭矩的跟踪。
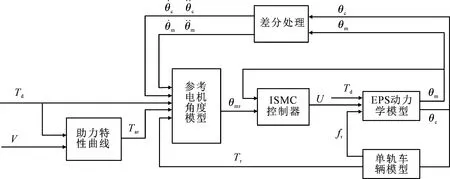
图2 EPS的组成
3.1 助力特性曲线
EPS控制的目标是实时动态的跟踪助力特性曲线产生的参考助力扭矩,从而降低驾驶员的输入力矩,增加了舒适性。
常规的助力特性曲线分为3种:直线型助力特性曲线、折线型助力特性曲线和曲线型助力特性曲线。本文所用的助力特性曲线是从汽车生产商得到的,如图3所示。助力电机所需的参考扭矩是由汽车行驶速度和方向盘扭矩所决定的。车速越快助力特性曲线越平缓,作用在方向盘上的力更小,提高了高速行驶的稳定性,反之,曲线越陡峭,作用在方向盘上的力更大,增加了低速行驶的灵活性。

图3 助力特性曲线
3.2 参考电机角度模型
普通的控制器回路选择用电流或者电压为参考信号控制电机,但是这种参考信号的回路没有把负载转矩的干扰控制在回路内。除了电流电压控制电机以外,电机角度也能控制电机[21-22]。本文选择电机角度作为参考信号可以将路面反作用力、助力转矩和方向盘扭矩反映在电机角速度中。因此,通过电机角度控制电机相比于电流和电压有更强的鲁棒性。
通过式(1)、式(4),忽略摩擦的非线性,可得
(9)
其中Q为结构系数。
参考电机角度为
(10)
3.3 助力扭矩跟踪的积分滑模控制器设计
滑模控制主要步骤如下:① 在状态空间中找到一个能使控制策略最终稳定的滑模面;② 设计一个适当的控制律使得控制策略能在有限的时间t内到达滑模面。控制律的设计应满足以下条件:

(11)
其中S为滑模面。
但普通滑模控制存在的缺点是无法在有限的时间内达到稳定以及接近滑模面时的抖动现象,积分滑模控制可以克服这些缺点。
根据参考信号确定误差E,即
E=θmr-θm。
(12)
定义Eint为控制器输入误差,λ1和λ2均为设计参数,且为大于零的常数,则滑模面为
S=λ1E+λ2Eint。
(13)
由式(13)可得
(14)


(15)
根据式(5)、式(12)、式(14)和式(15),可得
(16)
由式(16)可以看出,参考电压还受电机的电阻和电感的影响,事实上电机的电阻和电感是随着温度的变化而改变的,因此控制器需要对参数的不确定性有鲁棒性。
(17)
(18)

假定不确定项的边界为一常数,则有
|β|≤Ks。
(19)
其中Ks为不确定项的上界,且Ks>0。
采用指数控制律设计控制器,电压U定义为
KlS-Kssign(S)。
(20)
其中Kl为正李雅普诺夫常数。积分滑模控制对电机参数的鲁棒性已经在文献[23]中得到了证明。
对S进行微分,则有
(21)
滑模切换函数要满足以下条件:
(22)
根据式(21)、式(22)可得
(23)
由此证明了此积分滑模控制的运动轨迹可以在有限时间内达到切换面,即证明此算法对电机参数不确定性具有很强的鲁棒性。
4 实验分析
4.1 仿真实验分析
使用Matlab/Simulink软件搭建如图2所示的EPS结构框图,以评估本文提出的EPS控制策略。系统的输入为方向盘扭矩(幅值为5 N·m,频率为1 rad·s-1的正弦信号)和汽车行驶速度(V=60 km·h-1),采样时间为0.001 s,模型的其他参数值见表1~2。提供参考助力扭矩的助力特性曲线的设置如图3所示。
图4显示了电机角度的跟踪情况,即使系统中存在测量噪声(方差为0.015,均值为0的高斯白噪声),电机角度还是表现了很好的跟踪效果。

图4 电机角度跟踪
图5显示了助力特性曲线提供的参考助力扭矩与助力电机生成的扭矩之间的比较。由图5可以看出,所提出的控制策略可以很好地跟踪参考助力扭矩。电机生成的扭矩相比参考扭矩存在延迟,以及在波峰和波谷处有略微的波动。这些现象由EPS系统模型中的库仑摩擦力引起的,但并不显著。
为了验证此控制策略对电机参数的不确定性具有鲁棒性,将参数值(Rm,Lm)改变了10%,仿真结果如图6所示。结果表明,此控制策略对电机参数的不确定性有良好的鲁棒性。
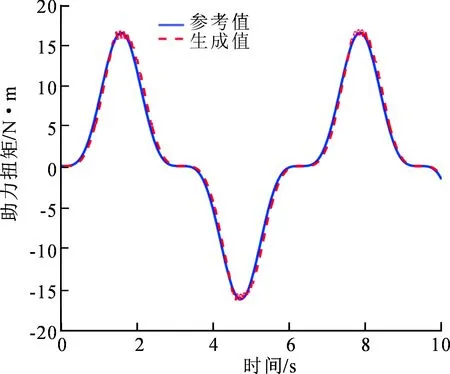
图5 电机助力扭矩跟踪

图6 电机角度和助力扭矩跟踪表现(参数值改变了10%)
4.2 硬件在环试验
在CCS软件中编写控制策略代码,然后烧录到基于TMS320F28035单片机的EPS控制器中,采用CAN通信协议。
方向盘角度、电机角度和方向盘扭矩等信号可在上位机上CVI软件制作的图形用户界面上显示,车速信号通过图形用户界面输入。图形用户界面可显示及更改一些系统参数。
测试控制策略的跟踪效果。设置车速为40 km·h-1,开始试验时先静止2 s,然后向右转动方向盘(文中向右的角度为正,向左的角度为负)至4 s后维持。结果如图7~8所示,电机的角度跟踪和扭矩跟踪能达到良好的效果。

图7 硬件在环试验的电机角度跟踪

图8 硬件在环试验电机助力扭矩跟踪
测试电机参数不确定性。车速设置为40 km·h-1,任意左右不间断转动方向盘10 min,让助力电机发热改变电机的电阻和电感参数。摆正方向盘,静止3 s后向右转动至4 s后维持,结果如图9所示。
电机的电阻和电感参数改变对电机角度和助力扭矩跟踪的影响不大,所以此控制策略对电机参数不确定性有良好的鲁棒性。
仿真结果和硬件在环试验结果都能良好的实现电机角度和助力扭矩跟踪以及对电机参数不确定性有很好的鲁棒性,表明了该控制策略在40 km·h-1和60 km·h-1不同车速下都有很好的表现。
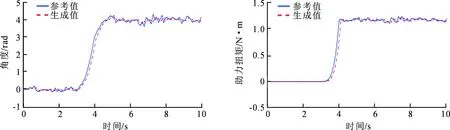
图9 硬件在环试验中电机角度和助力扭矩跟踪(参数值改变了10%)
5 结 论
文中提出了一种新型电动助力转向系统辅助转矩跟踪的控制策略。将单车模型生成的路面反作用力添加到EPS动态模型中,改善方向盘的转向感。利用参考电机角度模型生成的电机角度代替电机电流或电压来控制电机提供助力,电机角度信号形成的回路包含了负载扭矩的干扰,提高了系统的稳定性。用ISMC算法跟踪由参考电机角度模型产生的参考电机角度,为控制电机提供参考助力扭矩。仿真及硬件在环试验结果表明,该控制策略对电机参数的不确定性具有良好的鲁棒性,实现了良好的助力转矩跟踪。
