基于改进BP神经网络的导引头电子部件性能预测∗
2020-06-11
(海军航空大学 烟台 264001)
1 引言
电子元器件是航空航天和武器装备系统的重要组成部分,要求其在一定的时间内性能好、高可靠、寿命长,甚至“零故障”[1]。在静态长期贮存维护过程中,由于受到温度、湿度、振动、光照以及电化学腐蚀等外界影响,其内部组成材料性能发生物理和化学变化,对应的性能参数也将改变,从而会造成使用障碍,甚至失效[2]。对电子元器件进行性能预测,对于制定测试实验计划,有效改善使用条件,有着十分重要的意义。神经网络的机理是仿造人脑神经元网络对信息进行抽象处理,用多种连接方式将不同基本模型连接起来而组成不同的网络结构,它具有并行范围广、分布式存储和处理、自组织、自适应和自开发能力的特点,特别在处理需要同时考虑多种制约因素和不同条件下的、逻辑关系模糊的信息方面适用性较强[3]。目前神经网络在电子元器件故障诊断和性能预测方面应用广泛,例如,黄瑞毅[4]利用神经网络模型预测非工作状态时的电子元器件可靠性性能参数时间序列,与传统应用回归模型预测的结果比较,神经网络模型预测精度有较大提高。胡桂廷[5]构建在模型辨识基础上建立的BP神经网络,经过多次训练后对光伏电池的最大功率点电压进行预测,取得了理想效果,证明具有很好的适用性。邹心遥[6]等提出一种基于BP神经网络的电子元器件寿命预测方法,对MOS电容加速寿命进行试验并分析数据,得出该方法对预测MOS电容失效时间具有很好的实用意义,并且精度也符合要求。
BP(Back Propagation)神经网络[7]是1986年由Rumelhart和McCelland组成的科学小组提出的,该网络的训练算法采用的方法是通过反向传播训练误差来调整各层权值阈值,最终达到理想训练效果,该算法具有结构清晰明了、算法简单高效等特点。BP算法在实际应用中也存在不足,体现在网络对初始值和学习因子的选取敏感,优化目标函数复杂且可能存在多个极小点使得网络陷入局部极小,误差收敛达不到预期精度[8]。为提高BP网络训练收敛速度和减少误差,避免收敛陷入局部极小,本文提出一种对BP神经网络结构中赋值常数的动量因子进行改进,用前后两层误差反馈来调整动量因子的取值,使得动量因子在约束收敛震荡的同时,对权值和阈值的调整速率的精确度方面也起到一定作用。仿真试验证明改进后的BP神经网络在一定程度上提高了网络整体映射能力。
2 BP神经网络
2.1 神经元模型
神经元[9~10]是神经网络系统的基本处理单元,它是构成神经网络的基础。神经元在生物学上是以生物神经系统的神经细胞为基础的生物模型,在对生物神经系统进行研究的基础上探讨人工智能的机制,把神经元数学化产生了神经元数学模型[11]。图1是人工神经元的示意图。
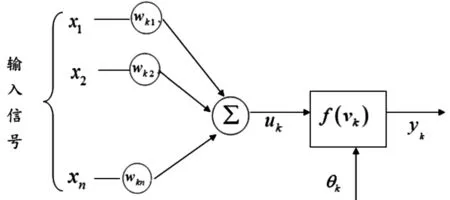
图1 神经元结构模型[12]
神经元模型可用下列表达式阐述:


神经元的输出决定于激活函数的类型,常见的激活函数主要有阶跃型、线性型、双曲型和对数s型等。
2.2 BP神经网络
BP(Back Propagation)神经网络采用误差反向传播来调整各层权值阈值的算法,广泛应用于函数逼近、系统辨识、语言识别和数据处理等领域[13]。BP网络的主体结构由一个输入层、一个或多个隐含层和一个输出层组成,各层传递函数可不同,常见隐含层中的神经元采用sigmoid型传递函数,输出层函数采用纯线性传递函数,其结构如图2所示。
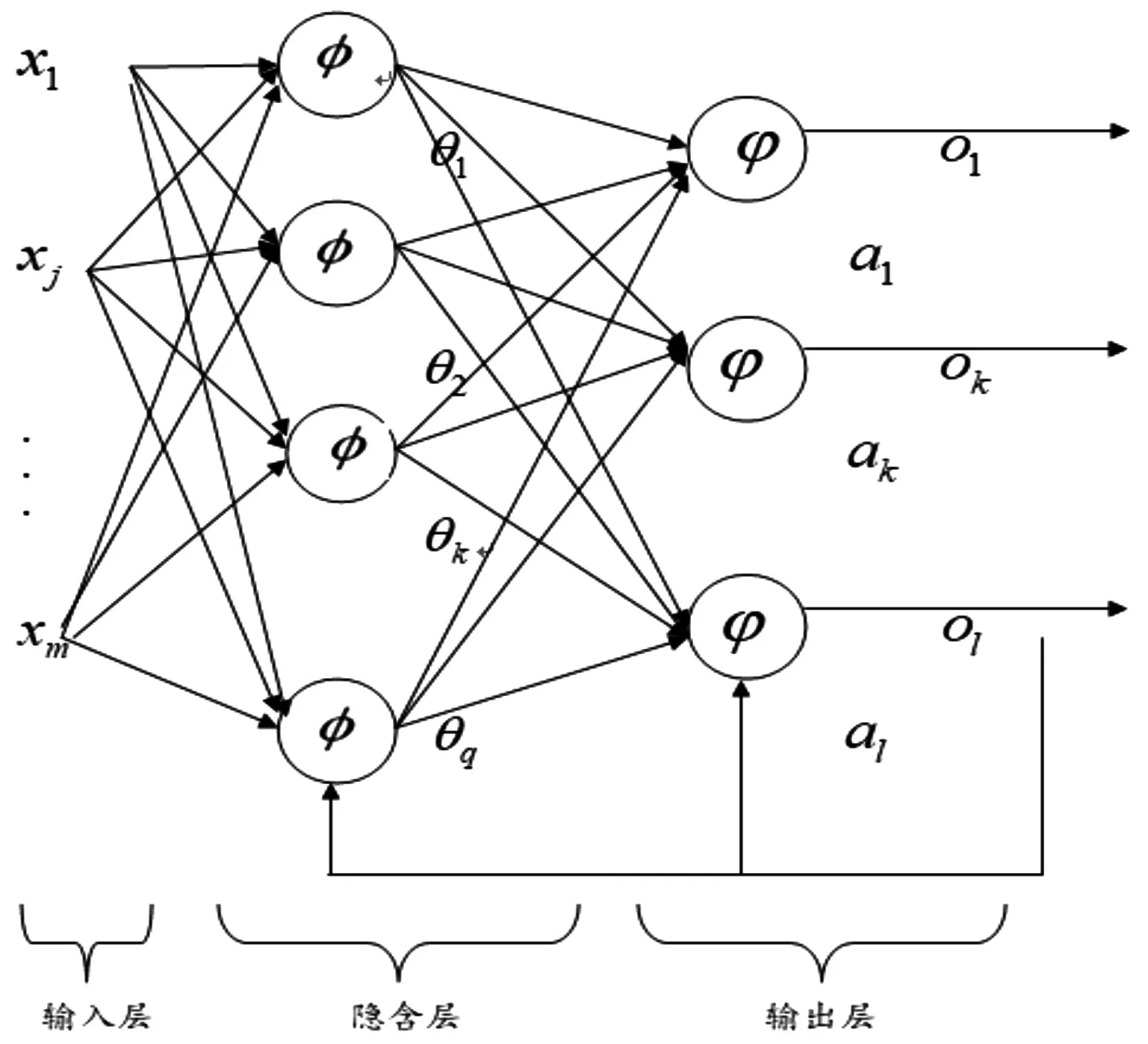
图2 BP网络结构
BP网络在学习过程中,网络的权值和阈值不断修正,首先输入模式经过输入层正向传播至隐含层,在隐含层的处理后传送输出层,每一层神经元的状态只受它上一层神经元状态影响。如果输出达不到期望,则进入反向传播环节,误差在反向传播的过程中不断修正各层连接的权值和阈值,直至误差达到精度要求为止。
结合BP结构网络,其算法推导过程如下:
1)输入信号正向传播过程:
隐含层第i个节点的输入

输出层函数为线性函数,则第k个节点的输入为
第k个节点的输出ok为

定义误差函数

其中定义第k个节点输出的期望值为Fk,Ek表示输出误差,预测精度即真实值与期望值之间的误差,误差越小,则说明精度越高[14]。
2)反向传播过程:
定义误差函数隐含层权值公式为

输出层权值公式为:

隐含层阈值公式为

输出层阈值公式为

式中,η为学习率[15],;α为动量因子[16],;t为调节次数;δ与偏差有关[17]。
对于输出层:

对于隐含层:
通常采用梯度下降法来调整BP神经网络各层连接权值和阈值调整量。
隐含层权值调整量为
输出层权值调整量为

隐含层阈值调整量为

输出层阈值调整量为

因为

则输出层权值调整量为

隐含层权值调整量为

输出层阈值调整量为

隐含层阈值调整量为

2.3 改进型BP神经网络
为了使网络预期精确度更高,训练速率更快,在传统BP神经网络算法中误差反向传播环节对隐含层和输出层的权值阈值进行修正。为达到预期,本文提出对BP神经网络中常数项动量因子赋变量值,可根据误差反馈调整值的大小,相比较BP神经网络,改进后的BP神经网络各层权值阈值调整不再是前两层简单线性关系,通过增加输出误差比值来调整大小,能够更深层将输出误差变化的影响因素考虑进去,在网络训练过程中,增加了前面输出误差的影响,在有效约束收敛时产生的震荡同时,提高了预测精度,在一定程度上提高了网络映射能力。对学习速率η的改进体现在通过相邻两层输出误差的比较来改变η的大小,合理调整训练进度,能够有效改善训练时间过长,学习速率过缓的问题。
3 改进BP神经网络模型及算法
与常规权值调整公式中常数项动量因子α0不同,改进后的动量因子是一个变量,其取值受前面输出误差的影响,且大小随输出误差比值大小做调整。按照经验可知,,误差调整总体呈下降趋势。
现令

则式(2)~(8)、式(2)~(9)调整为
同理阈值的调整为
此外,通常取常数项的学习速率η对网络的训练性能也起一定作用。η取值要求合适但没有绝对定量,取值过小,会使得训练收敛减慢,训练时间过长;取值过大,会网络稳定性降低,收敛效果变差[18]。综合考虑训练时间和稳定性两方面因素,参照预先设定的误差参数,提出对η取值进行调整,当网络输出误差较上一层输出超出设定值,则减小η值,反之增加,直至网络训练收敛达到预期。η取值如下:

通过前后两层误差自动调整η来一定程度上保证网络尽可能以最大允许速率训练。
4 基于改进BP神经网络预测方法
基于改进BP神经网络的预测步骤如下:
由此可得出m组样本数据(Rj,Mj),j=1,2,...,m。其中包括训练样本和测试样本。
2)网络结构初始化
网络结构首先要确定隐含层的层数,然后确定网络输入层、隐含层和输出层的节点数目。隐含层层数的确定对网络结构具有重要影响,层数增加能在一定程度上提高精度,降低误差,但是同时也使得结构复杂,延长了训练时间,因此大多采用具有一个输入层、一个输出层和一个隐含层的三层网络模型结构,当然要视具体情况而定[19]。设输入层节点数m为评价指标的个数,输出层节点数n一般为1,隐含层节点数q的确定有多个经验优化关系,选择其中的一个,即
3)网络参数初始化
网络结构训练过程中,各层权值、阈值的确定是关键所在,按照专家经验,权值的初始值w取值在(- 0.3,+0.3)范围内。
4)训练网络
利用改进的BP神经网络,计算网络输出及误差,当网络收敛至一定程度中止训练,否则调整各层权值阈值,直至达到训练目标。
5)预期性能分析
为了科学合理的评判网络预测效果,需要从不同角度评判预测性能。网络预测速率方面采用运算收敛至目标的迭代次数来评判,网络预测精度方面采用预测值与真实值的相对误差来评判,综合二者来评判网络的整体预测效果。
5 实例分析
通过对导引头实测数据的研究分析,雷达导引头[20]中故障率较高的部件有发射机、接收机、电源组合和天线组合,通过测试各部件所得数据来分析导引头性能及健康状态,其中在导引头各部件中故障率占比较大的元器件有:电源、磁控管、二极管等。其中以雷达导引头中27V电源为研究对象,以下是电源5年每季度电压变化测试数据并进行归一化处理,见表1。

表1 电源电压检测数据归一化处理结果
取其中连续6个季度的检测值作为输入向量,第7个季度的检测值作为目标向量,则可得到表2,取前8组数据作为训练样本,后3组作为测试样本,最后通过测试值与预测值对比进行误差分析。

表2 网络训练样本和测试样本
前人大量实验证明,一个三层BP神经网络经过多次训练能够完成任意m维到n维的映射,且达到一定精度。输入层节点为m=6,输出层节点为n=1,按照经验公式计算,隐含层节点应取q=8,由于隐含层节点数的选取对网络精度和运算速率影响较大,现取q=7,9,11,13,然后通过网络训练观察精度和运算速率来确定q最优取值。设网络训练次数为2000,训练目标0.0001,w的初始取值在(- 0.3,+0.3) 内选取,η=0.05,θi(0)=0.9,ak(0)=0.9,隐含层所有映射关系都是s型函数,利用Matlab进行仿真试验,得到隐含层节点不同取值所对应的训练误差曲线,如图3所示。
通过对隐含层取不同值,观察网络收敛速度和误差精度,在优先考虑误差精度的基础上考虑运算速率,如图1~4。对比发现,当隐含层节点q=7时,网络收敛速率最快,当q=9时,收敛速率有所增加,但预测误差最小。综合比较,隐含层数q=9总体效果较好,则改进后BP神经网络输入层、隐含层和输出层节点分别取6、9、1。
为验证改进的BP神经网络预测性能,现以2017年三、四季度和2018年第一季度电源电压检测数据为期望数据,分别以传统BP神经网络和改进神经网络进行电源电压预测,利用Matlab仿真试验,得到两种算法下训练速度和误差结构曲线图,如图5所示。

图5 改进前后两种算法预测误差曲线图
通过观察图5和图6可知,改进BP神经网络算法预测精度较高,预测值与期望值拟合度较高,预测平均误差为0.45%,而传统神经网络预测平均误差为4.8%,在预测误差方面,改进BP神经网络明显由于传统BP神经网络。在运算速率方面,改进BP神经网络在迭代809次后,误差精度就达到预期,而传统BP神经网络迭代1000次仍未达到预期。由此可见,改进BP神经网络比传统BP神经网络运算精度更高,收敛速度更快,具有更强的映射能力。
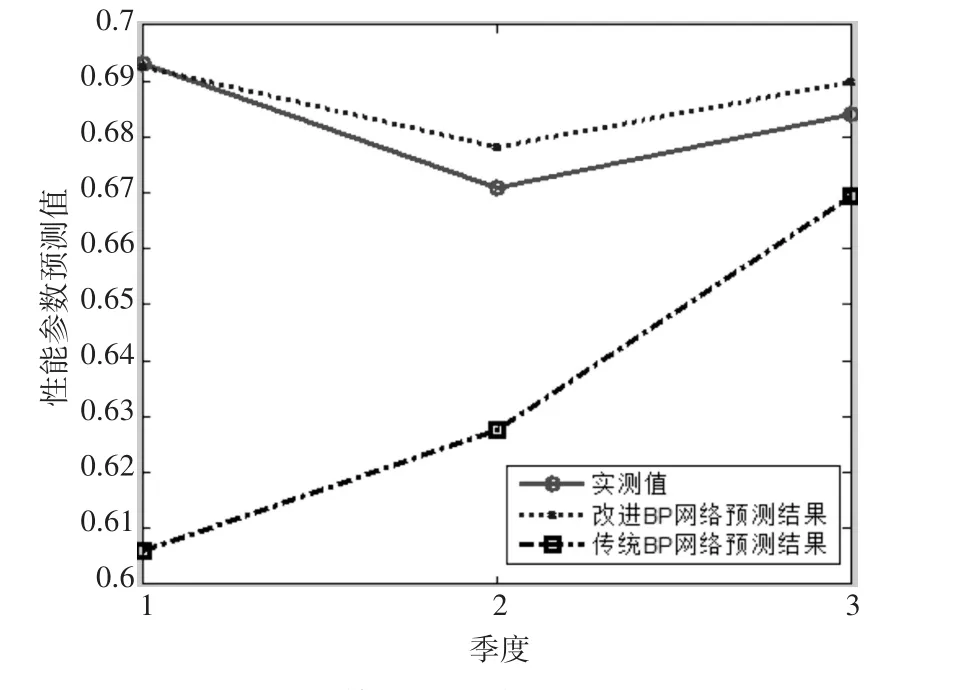
图6 两种算法性能参数预测曲线
6 结语
本章在对BP神经网络研究的基础上,提出了改进型BP神经网络,并对某型防空导弹雷达导引头发射机上电源电压性能进行预测,通过仿真实验证明,改进型BP神经网络对导引头发射机电源电压性能预测具有很好的适用性,相比较传统BP神经网络具有运算精度更高,收敛速度更快的优点,网络映射能力更强。下步工作主要研究改进BP神经网络对其他电子设备的适用型,并进一步提高网络的稳定性。
