浅析一种用于塔式太阳能热发电站的定日镜全自动清洗车
2020-06-09陈康立张旭中王李波周宇明黄圆明
陈康立,张旭中,何 龙,谭 潇,王李波,周宇明,黄圆明
(浙江中控太阳能技术有限公司,杭州 310053)
0 引言
太阳能热发电作为一种可再生能源利用方式被广泛应用。根据太阳能采集方式不同,太阳能热发电可以分为槽式、塔式、碟式和菲涅尔式4种技术类型。其中,塔式太阳能热发电是利用大量定日镜将太阳直射光聚集到吸热塔顶部的接收器上,接收器将吸收的太阳光光能转换成热能,再将热能传给工质,经过蓄热环节,再输入至蒸汽发生器,膨胀做工,以带动发电机发电,最后以电能的形式输出[1]。塔式太阳能热发电的原理示意图如图1 所示。
定日镜由反射镜、支撑桁架、转动装置及立柱组成。大量的定日镜组成镜场,而镜场作为塔式太阳能热发电站的主要组成部分,其造价占电站整体造价的一半以上。比如在投资达1.42 亿美元的Solar One 电站中,镜场的投资比例占了52%[2]。镜场的清洁度关系到整个电站的发电效率,维持镜场较高的清洁度可有效提高电站的效益。
我国西北地区适合建设塔式太阳能热发电站,但此类地区往往风沙较大,定日镜长期在户外追日,其表面容易积灰,导致反射率降低,这会影响电站的发电效率,降低电站运行的经济性。因此,定日镜的清洗工作是塔式太阳能热发电站运营中的关键环节。为了提高定日镜清洗工作的效率与安全性,降低清洗工作的成本,减少清洗工作对定日镜日常追日产生的影响,需制定高效、安全的定日镜清洗方案,并采用相应的清洗车对定日镜进行清洗。
本文介绍了一种基于导航系统和镜场整体控制的定日镜全自动清洗车,其可以大幅减少人力资源,并实现夜间清洗,提高了电站运营的经济性。

图1 塔式太阳能热发电的原理示意图Fig. 1 Schematic diagram of tower type CSP
1 定日镜全自动清洗车的结构
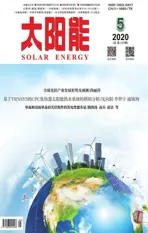
目前,由于不同的塔式太阳能热发电站中采用的定日镜规格各不相同,从2 m2的小型定日镜到超过100 m2的大型定日镜都有,因此,清洗方案也大相径庭。不同规格的定日镜采用不同的清洗车,具体如图2 所示。
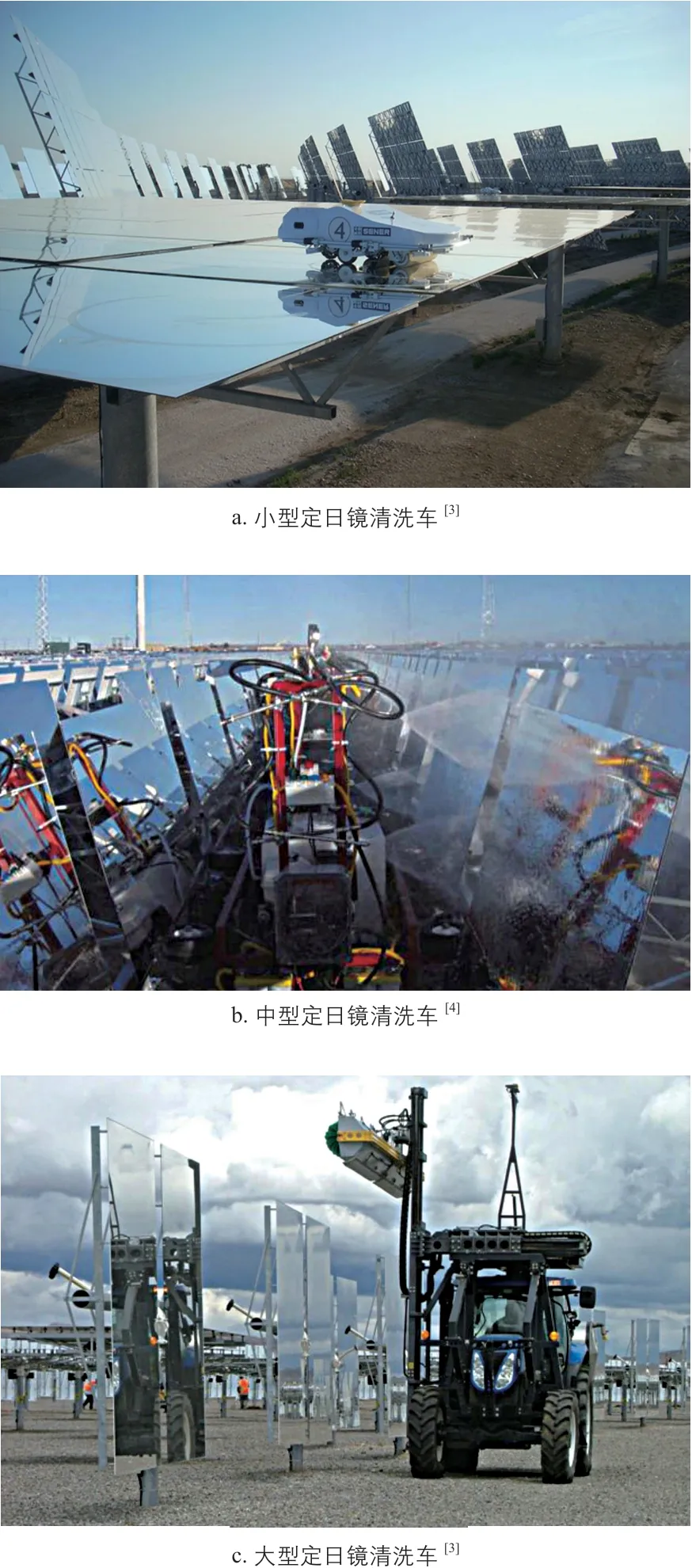
图2 不同规格定日镜采用的清洗车Fig. 2 Cleaning vehicle for heliostats with different specifications[3-4]
现有的定日镜清洗设备大多涉及到人工操作,但塔式太阳能热发电站中的定日镜数量极多,若完全依靠人工操作来进行定日镜的清洗,非常消耗人力资源。因此,采用定日镜全自动清洗车对电站运营至关重要。
1.1 定日镜全自动清洗车的车体结构
为了能够在正常行走的同时跨过定日镜镜面,本文设计的定日镜全自动清洗车的车体采用跨越式门架结构,使清洗车在工作时横跨于一行定日镜之上,可一边行走一边对定日镜进行清洗作业。定日镜全自动清洗车的示意图如图3 所示。
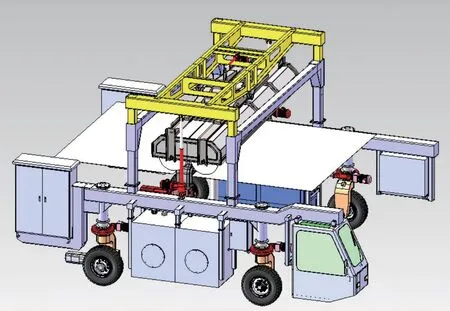
图3 定日镜全自动清洗车示意图Fig. 3 Schematic diagram of heliostat automatic cleaning vehicle
定日镜全自动清洗车的车体两侧为车辆驱动部件,每侧安装有2 组轮胎。两侧车体通过中部横梁进行连接,形成了一个完整的门架结构。门架内部宽度略宽于定日镜宽度,门架顶部距离水平姿态时的定日镜的高度为60~80 cm,这样能保证清洗车横跨于定日镜之上进行清洗工作。
定日镜全自动清洗车采用4 个转轮向,以保证清洗车在行走过程中有尽可能小的转弯半径。由于4 个轮子均可以转向,清洗车具备八字转向,因此其可以采用斜向行走、横向行走、原地自转等多种运动模式,可保证车体能在道路环境复杂的定日镜镜场中顺利行走。
1.2 定日镜全自动清洗车的清洗机构
定日镜全自动清洗车的清洗机构安装在升降平台上,采用尼龙刷辊加喷水的方式进行清洗。1 个清洗机构中有2 根刷辊,单根刷辊的两端装配有台阶轴及键槽;刷辊采用两支点支撑的方式,可大幅加强刷辊旋转过程中的稳定性。清洗机构的运动由其上安装的传感器的反馈信号来控制,进而完成整个镜面的清洗工作。
升降平台的升降通过安装在车身前部的2 个超声波传感器来反馈,依靠减速电机与滚珠丝杠驱动滑架来实现,从而调整刷辊到定日镜镜面的距离,并可通过升降平台两侧的独立驱动来微调刷辊的角度。
当冬季气温低于0 ℃、定日镜清洗无法继续采用水洗方案时,可人工关闭清洗车的喷水机构,转而采用干刷清洗模式。为了保证清洗效果,在干刷清洗模式下,清洗车的清洗机构将采用双排刷辊,以通过1 次清洗达到2 次的清洗效果,缩短了清洗时间。
1.3 安全防护系统
清洗机构至定日镜镜面间,除了有超声波测量距离外,还安装了多组限位开关,以确保刷辊不会触碰到镜面。此外,车身自前向后安装了4 组拉线传感器,分别布置在车体内侧上部的左前、左后、右前和右后部位。如果定日镜全自动清洗车意外偏离轨迹时,定日镜碰到任何一组拉线传感器,将会触发报警装置,并强制清洗车停车;只有在人工解除报警并将车身调整至正确位置后,清洗车才会继续向前行进。
2 定日镜全自动清洗车的功能系统
本文设计的定日镜全自动清洗车是根据在西北地区投运近4 年的中控德令哈10 MW 塔式太阳能热发电站的现场实测数据优化设计的,并在青海德令哈的塔式太阳能热发电站中得到了充分测试验证。
假设镜场设计时的平均清洁度为85%,那么理想的清洗前的平均清洁度应高于80%,清洗后的平均清洁度应高于90%。而实测的单个定日镜清洁度随时间变化的曲线显示,其清洁度从90%降至80%的时间约为7 天(受到季节及天气状况影响,可能会存在波动)。根据实际测试,定日镜全自动清洗车对镜面进行一次清洗后可将单个定日镜的清洁度从70%提升至约90%;清洗15天后镜场的平均清洁度才降至78%以下,所以按照5 天清洗一次设计清洗周期较为合理。由于我国西北地区沙尘量大,如果依然参照国外的运营模式,每2~3 个月清洗一次,那么全年镜场的平均清洁度将仅约为60%,发电量损失将超过
30%。
定日镜全自动清洗车可在夜间工作,每日可工作16 h,按照5 辆车计算,为了在相同的清洗时间内完成清洗任务,采用人工清洗方案时,由于人工清洗白天只能清洗8 h,则需配备10 辆常规清洗车和10 名专职驾驶员。由此可以看到,采用定日镜全自动清洗车的清洗方案能够节省大量人力成本开支。
当1 辆清洗车在进行定日镜清洗时,会影响大约30 面定日镜的正常追日,综合估算发现,当10 辆清洗车一起工作时,将导致镜场可用率下降约0.8%。在相同清洗任务及相同工作时间下,所需要的定日镜全自动清洗车数量较少,且运行速度更稳定;同时,全自动清洗车清洗单面定日镜的耗时仅约为30 s,对定日镜正常追日的影响较小。综上所述,采用定日镜全自动清洗车对镜场的影响更小。
2.1 定日镜全自动清洗车的导航系统
定日镜全自动清洗车的导航系统包括卫星导航系统与惯性导航系统。卫星导航系统采用载波差分(RTK)技术实现全自动清洗车的厘米级定位,具有全天候、导航误差不随时间积累的优势,可保证定位精度在2 cm 以内,且实时性好。惯性导航系统主要用于车体航向的确定,尤其是在卫星导航系统存在遮挡时,有了惯性导航系统,定日镜全自动清洗车仍可以正常使用。定日镜全自动清洗车的导航系统以卫星导航系统为主,惯性导航系统为辅。
由于卫星导航系统仅可以提供清洗车的位置信息,但清洗车在自主驾驶运行过程中还需准确获取车辆的运行方向、与定日镜的相对位姿关系、运行避障策略等信息,因此需采用惯性导航系统来对清洗车的位置、速度、角度、角速度等实时信息进行测量。定日镜全自动清洗车的运行路径示意图如图4 所示。
图4 全自动清洗车的运行路径示意图Fig. 4 Schematic of the automatic cleaning vehicle running path
由于定日镜全自动清洗车在镜场中行进时还会遇到各种复杂的地形环境、定日镜姿态干扰等未知情形,因此其应该配备红外测距仪或成像相机来实时监测车辆的周围环境,以降低车辆的运行风险。
2.2 定日镜全自动清洗车的控制系统
配备有导航系统的定日镜全自动清洗车通过以太网连接到主控室,操作人员通过主控室的上位机获取清洗车自身状态信息和周边环境数据,并根据控制需求和获取的清洗车相关信息输入相应的控制指令,控制指令经以太网传输给定日镜全自动清洗车,该清洗车的工控机解析接收到的控制指令,并根据控制指令完成相应的作业。
定日镜全自动清洗车的控制系统包括工控机、主控制器、防撞监测与避障系统、牵引制动机构及转向电机。
工控机用于采集车载设备的数据,并执行核心导航算法及控制算法的运算,可输出或存储车辆实时位置动态信息及其他相关的运行数据。
主控制器通过CAN 网络接收工控机输出的清洗车的实时信息,控制车体的牵引制动机构和转向电机,实现全自动清洗车的行进速度与转向控制。
防撞监测与避障系统主要起保护作用,避免全自动清洗车在行进过程中撞破定日镜镜面。该系统可采用云台相机、红外相机或车载雷达来实时获取清洗车周围的图像,并经由工控机运行图像处理算法来控制全自动清洗车的行进;同时在车体周围安装传感器,主控制器通过接收传感器信号来控制全自动清洗车的行进。
牵引制动机构包括车载油门和刹车系统,主控制器通过电控的方式,依据工控机下发的指令控制牵引制动机构,从而控制定日镜全自动清洗车的行进速度。
转向电机作为全自动清洗车的执行部分,可以接收主控制器发出的指令并对指令进行响应,从而控制全自动清洗车的执行机构,实现对全自动清洗车转向的控制。
3 结论
定日镜作为塔式太阳能热发电站的重要组成部分,其清洁度会极大影响电站的发电量,本文介绍了一种用于塔式太阳能热发电站的定日镜全自动清洗车,并得到以下结论:
1)定日镜全自动清洗车可大幅降低塔式太阳能热发电站的运营成本。全自动清洗车每天可清洗16 h,而人工清洗方案仅能在白天工作8 h,因此为了使花费的清洗时间相同,人工清洗方案需要配置2 倍的清洗车数量。而且随着清洗车数量的增加,无法正常跟踪追日的定日镜数量会相应增加,则镜场可用率会降低,进而影响电站效益。
2)采用定日镜全自动清洗车可实现定日镜镜场的随时全自动化清洗,将大幅提高镜场的平均清洁度,根据实际测试,定日镜全自动清洗车对镜面进行一次清洗后可将单个定日镜的清洁度从70% 提升至约90%,从而提高镜场的聚光集热效率。
3)全自动清洗车清洗单面定日镜的耗时仅约30 s,对定日镜正常追日的影响较小。