长竹蛏逃逸游动观察研究
2020-06-08刘甜毕树生
刘甜 毕树生


摘 要:竹蛏以穴居为主,主要利用其斧足挖掘洞穴。在食物、环境等发生变化时,竹蛏也会出现逃逸游动行为。本文通过高速相机观察到长竹蛏在逃逸游动时,其斧足会鞭动摆动。通过这种方式长竹蛏得以在短时间内快速前进;通过计算得知长竹蛏的游动速度跟其大小正相关,成年长竹蛏游动速度能达到每秒12倍体长。该研究丰富了竹蛏行为学特征数据,对竹蛏人工养殖、海洋捕捞、近海生态环境恢复以及水下仿生机器人研制都有参考价值。
关键词:竹蛏;斧足;游动
中图分类号:Q811
Abstract:The Solen strictus are mainly cave dwellers,using their axe feet to dig caves. The Solen strictus also exhibit escape-swimming behavior when changes in food,environment,etc. occur. In this paper,the Solen strictus were captured on a high-speed camera as they escaped,and it was found that the Solen strictus whipped while the water outlet between the foot and the coat membrane sprayed water outwards. This kind of propulsion allows the Solen strictus to advance rapidly in a short period of time. It is calculated that the swimming speed of Solen strictus is positively correlated with their size and that the adult Solen strictus can travel up to 12 times their body length per second. This study enriches the data on the behavioral characteristics of Solen strictus and is of interest to Solen strictus in artificial farming,marine fishing,offshore ecological restoration and underwater bionic robot development.
Keywords:Solen strictus;Foot;Swimming
1引言
仿生水下機器人在海洋资源探索与开发、海洋军事安全、海洋生态环境监测与保护等领域有极为重要的应用[1-3],有关水下仿生机器人的研究也是目前的研究热点。水下生物的种类非常多,各类生物在水中的运动模式不尽相同。鱼类的波状摆动推进运动研究最早、最多,也是水下生物最广泛的一种运动方式,主要是依靠身体横向扭曲,往复摆动,以横波的方式从前向后传播运动[4]。目前国内外研究者已经从理论分析、数值模拟、试验观测等多个方面对鱼类的推进机理进行了大量研究[5-8]。此外还有以海龟、虾、蟹等生物的其它运动模式及相应的研究[9]。
竹蛏是一种双壳软体动物,以穴居为主,通过壳的开合配合其斧足运动,可以在泥沙质海滩挖掘洞穴,在洞穴中上升和下降。除挖掘行为以外,有些种类的竹蛏还也可以进行弹出式游泳[10-11],比如大竹蛏(Solen grandis Dunker)、长竹蛏(Solen strictus Gould)、爱尔兰大竹蛏(Ensis Siliqua)、北美荚蛏(Siliqua patula)、尖刀蛏(Cultellus scalprum Gould)[12]等。这是一种非常独特的运动方式,竹蛏以这种运动方式实现了快速游动。有关于竹蛏斧足挖掘方面的研究报道较多,目前已有对竹蛏斧足挖掘功能的仿生研制,比如Winter等人制作了一款机器人——RoboClam [13-14]。但是,关于竹蛏游动方面的研究以及针对竹蛏独特的游动行为方面的仿生研究均未见报道。竹蛏的挖掘和游动行为都是极具特点,这为仿生机器人的研究提供了非常好的参考借鉴。
本文以长竹蛏为研究对象,主要探究长竹蛏逃逸游动时的运动特性。通过高速相机观察长竹蛏的逃逸游动过程,对不同大小的长竹蛏进行逃逸游动观察,逐帧分析获得其游动速度及加速度数据。通过该研究可以丰富竹蛏行为学特征数据,同时对水下仿生机器人研制有重要参考价值。
2 材料与方法
试验使用的长竹蛏采集自河北省秦皇岛市南戴河区葡萄岛近海沙滩,在退潮期进行挖掘,选取外壳无任何损伤的长竹蛏,放入带砂子和海水的鱼缸,带回实验室暂养3天。由于海水温度较低,水温按每两小时增加3℃的方式增加到(20.0±1.5)℃,暂养期间保持继续供氧。试验用蛏子规格:成年长竹蛏(2只),壳长(10 ± 0.3)cm,体重(45 ± 0.3g),稚蛏(2只),壳长(5.3 ± 0.2)cm,试验长竹蛏在试验前禁食24h。
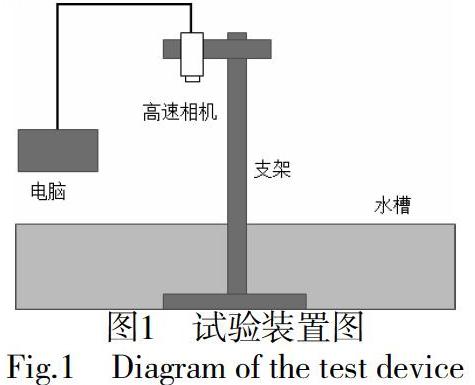
用丙烯酸塑料材料制作透明水槽,尺寸100×30×30 cm,在水槽内堆入一层沙子,厚度1cm,再置入海水,深度15 cm,海水中溶解氧大于0.6 mg/L左右。在水槽上方安装数字摄像仪(SL-6320AK),以拍摄长竹蛏的游泳视频,实验装置如图 1所示。
将长竹蛏从水中拿出10 s再放入试验水槽,由于环境变化会刺激长竹蛏从而发生逃逸行为,对长竹蛏的逃逸行为进行高速相机拍摄。对成年长竹蛏和稚蛏均各做2次试验。对拍摄的视频进行比较,提取典型运动过程,进行逐帧分解,分析长竹蛏逃逸游泳速度、加速度。
3 试验结果及分析
3.1长竹蛏斧足鞭动弹射过程
长竹蛏一般穴居在泥沙里,当食物、盐度等环境因素发生剧烈变化时,会从洞穴里钻出来,通过斧足弹射游动逃离,以寻找更为适宜的栖息地。另外,长竹蛏一般会选择挖掘钻洞以躲避危险,但是,当长竹蛏无法通过挖掘逃逸时会选择游动方式。长竹蛏开始游动时,斧足伸出壳外并向一边逐渐弯曲,长度逐渐伸长。此时,长竹蛏速度基本不变,当斧足达到最大伸长量一半时,开始像鞭子一样突然向另一侧摆动。在鞭动过程中斧足长度仍然在伸长,斧足摆动到与壳长方向一致时开始向壳内收缩。这时长竹蛏开始滑行,斧足跟壳体保持在同一条直线以减小游动阻力,增加游动距离。图2(a)和图2(b)给出了从高速录像中摘录的部分画面以及画面对应的时刻。通过斧足的弹射游动,长竹蛏可以在短时间内快速移动至比较远的距离。长竹蛏滑行速度下降到一定程度或者静止时,会再次重复上述过程。
3.2 运动速度计算
分解高速相机拍摄到的长竹蛏逃逸游动视频,得到逐帧图像。手动标记长竹蛏斧足与壳交界处点的位置,可得相邻两帧之间的移动距离di,已知相邻两帧之间的时间间隔t,可得速度Vi=di/t,进而可得加速度ai =(Vi+1 -Vi)/ t,如图3所示,平均加速度a=(a1 +… + an)/ n(n为总帧数,i = 1,2,…,n-1)。计算得到的从静止到最大速度(Vmax)之间的所有速度的平均值为疾冲速度,最大速度(Vmax)到停止之间的所有速度的平均值为滑行速度。如图4所示。
通过对逐帧图像进行描点标记,分析计算出的成年蛏和稚蛏的最大速度、疾冲速度、滑行速度和加速时间,如表1所示。
通过表1及图4可知滑行速度跟流体阻力相关,长竹蛏个体小,阻力也小。最大疾冲速度跟体形相关,体形大速度快。成年蛏和稚蛏的加速时间接近,说明加速时间跟体形无关。成年蛏疾冲速度达到48 cm/s,接近乌贼最大稳定游动速度[15]。最大速度可以达到11.8 BL/s(118 cm/s),超过多数头足类水下软体生物,这完全不同于人们对贝类速度慢的认识,可见斧足鞭動弹射式推进是一种极具优势的水下推进方式。
分析可知成年蛏的最大加速度74.8 BL/s2(747.5 cm/s2),稚蛏的最大加速度78.6 BL/s2(408.7 cm/s2),即可知长竹蛏游动的加速度跟体形没有关系。斧足的鞭动式摆动能给长竹蛏的运动提供强大的动力。如图3所示。
4结论
本文对长竹蛏斧足鞭动弹射游动行为进行了观测。本文的研究证明斧足的鞭动摆动是一种极具优势的独特的水下运动方式,竹蛏通过斧足的鞭动式摆动在0.5 s内获得的极大动能,说明这种运动形式的效率很高,这对水下仿生机器人的驱动方式的研究极具参考价值。本文的研究丰富了竹蛏行为学特征数据,对竹蛏人工养殖、海洋捕捞、近海生态环境恢复有一定参考价值。
参考文献
[1] Low K H. Current and Future Trends of Biologically Inspired Underwater Vehicles. Defense Science Research Conference and Expo(DSR),2011:1-8.
[2] 李铁风,李国瑞,梁艺鸣,等.软体机器人结构机理与驱动材料研究综述[J]. 力学学报,2016,48(4):756-766.
LI Tiefeng,LI Guorui,LIANG Yiming,et al. Review of materials and structures in soft robotics [J] Chinese Journal of Theoretical and Applied Mechanics,2016,48(4):756-766.
[3] 彭学伦. 水下机器人的研究现状与发展趋势[J].机器人技术与应用,2004(4):44~47.
PENG Xuelun. Research status and development trend of underwater robots[J]. Robot Technology and Application,2004,(4):44-47.
[4] 陈政宏,李志扬. 浅谈流体中生物的推进方法[R/OL]. SciScape 专题文章,2000[2000-12-04]. http://www.sciscape.org/articles/fish_swim/.
[5] Borazjani I,Sotiropoulos F. Numerical investigation of the hydrodynamics of anguilliform swimming in the transitional and inertial flow regimes[J]. Journal of Experimental Biology,2009,212(4):576-592.
[6] Roth E,Sponberg S,Cowan N. A comparative approach to closed-loop computation[J]. Current Opinion in Neurobiology,2014,25:54-62.
[7] Shoele K,Zhu Q. Leading edge strengthening and the propulsion performance of flexible ray fins[J]. Journal of Fluid Mechanics,2012,693:402-432.
[8] 張薇,余永亮,童秉纲. 鱼类巡游中的活体肌肉力学性能预测[J]. 力学学报,2014,46(4):619-625.
ZHANG Wei,YU Yongliang,TONG Binggang. Prediction of mechanical properties of fish muscle in vivo during steady swimming[J]. Chinese Journal of Theoretical and Applied Mechanics,2014,46(4):619-625.
[9] Kruusmaa M,Gkliva R,Tuhtan J A,et al. Salmon behavioural response to robots in an aquaculture sea cage[J]. Royal Society Open Science,2020,7(3):191220.
[10] 张玺,黄修明. 中国海竹蛏科的研究[J].动物学报,1964(02):32-48.
[11] AKIRA A. The Biokinetics of Flying and Swimming[M]. American Institute of Aeronautics and Astronautics,1992.
ZHANG Xi,HUANG Xiuming. Study on the razoraceae in China[J]. Acta Zoologica Sinica,1964(02):32-48.
[12] 陈品健,叶启旺,李碧全. 尖刀蛏生物学初步研究Ⅱ.分布及生活习性[J].集美大学学报(自然科学版),1986(01):46-57.
CHEN Pinjian,YE Qiwang,LI Biquan.The preliminary on the biology of Cultellum Scalprum(Golud)Ⅱ. distioh and Living-habits[J].Journal of Jimei University(Natural Science)1986(01):46-57.
[13] Isava M.,Winter,V A G. An experimental investigation of digging via localized fluidization,tested with roboclam:a robot inspired by atlantic razor clams [2016]. Journal of Mechanical Design,2016,138(12):125001.
[14] Winter A G G,Deits R L H.,Dorsch D S,et al. Razor clam to roboclam:burrowing drag reduction mechanisms and their robotic adaptation [J]. Bioinspiration & Biomimetics,2014,9(3):036009.
[15] Anderson E J. Jet flow in steadily swimming adult squid[J]. Journal of Experimental Biology,2005,208(6):1125-1146.
作者简介:刘甜(1988-),男,博士研究生。
