沉管隧道碎石基础整平监测技术研究
2020-06-08王崇明孔维达王晓进
王崇明,孔维达,雷 鹏,王晓进
(1.交通运输部天津水运工程科学研究所,天津 300456;2.天津水运工程勘察设计院 天津市水运工程测绘技术重点实验室,天津 300456;3.交通运输部广州打捞局,广州 510260)
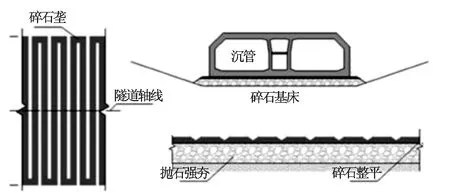
图1 带垄沟的碎石基础
从目前国内外沉管隧道的基础处理发展来看,沉管隧道基础处理的方法主要有先铺法和后填法两大类,先铺法有刮砂法和刮石法,后填法有砂流法、灌囊法和压浆法等。通过对国内外已建设的百座以上隧道基础处理方法统计,先铺法占已建隧道的28%,喷砂法占18%,压砂法占17%,灌砂法占16%,先铺法占的比例最高。后填法的主要优点在于高程便于调节,施工设备占用航道时间短和潜水工作量少,但在地震时容易发生砂土液化,而使基础失去承载力。对于海底沉管隧道,由于水深大、水流复杂、管节体量大,若使用后填法基础需要对管节两端进行临时支撑,而节段式管节在简支状态下受力较为不利,因此海中沉管隧道一般优先考虑先铺法基础垫层[1-8](图1)。

图2 香港沙中线海底沉管隧道工程整平架
碎石整平法是由传统刮石发展为通过下料刮铺的一种先铺法,可以通过设定料斗刮刀的行进方向将碎石垫层铺设成带有垄沟的形式[9]。垄沟形式的主要优点有:在相对较大的波浪和水流情况下仍能适用,具有一定纳淤能力,管节沉放连接后能快速保持管节稳定以及垫层顶面可进行可视化检查。但这种碎石整平的先铺法,管节在着床后高程及纵、横坡不可再调,管节高程与纵、横坡的误差基本取决于碎石垫层的误差,因此管节沉放对基础垫层的精度要求高[10-11],通常情况下允许偏差不超过±40 mm。图2所示为广州打捞局在香港沙中线海底沉管隧道工程中使用的整平架,该整平架有2根出水的垂直定位杆,4根调节范围在2 m以内的液压支撑腿,移动部分包含大车和小车两部分,料斗装在小车上,料斗口装有刮刀,可以将碎石面刮平,供电、液压、传感器数据传输均通过电缆完成,下料管采用软管。
本文针对图2中所示的整平架,设计了一套整平作业水下监测系统,主要融合GPS、压力传感器、倾斜仪、高度计等设备,解决高精度的高程传递问题,确保整平后碎石面高程满足设计要求。
1 高程监测方法
整平架料斗口高程监测采用两种独立的方法,以便相互检核。
1.1 GPS RTK+倾斜仪
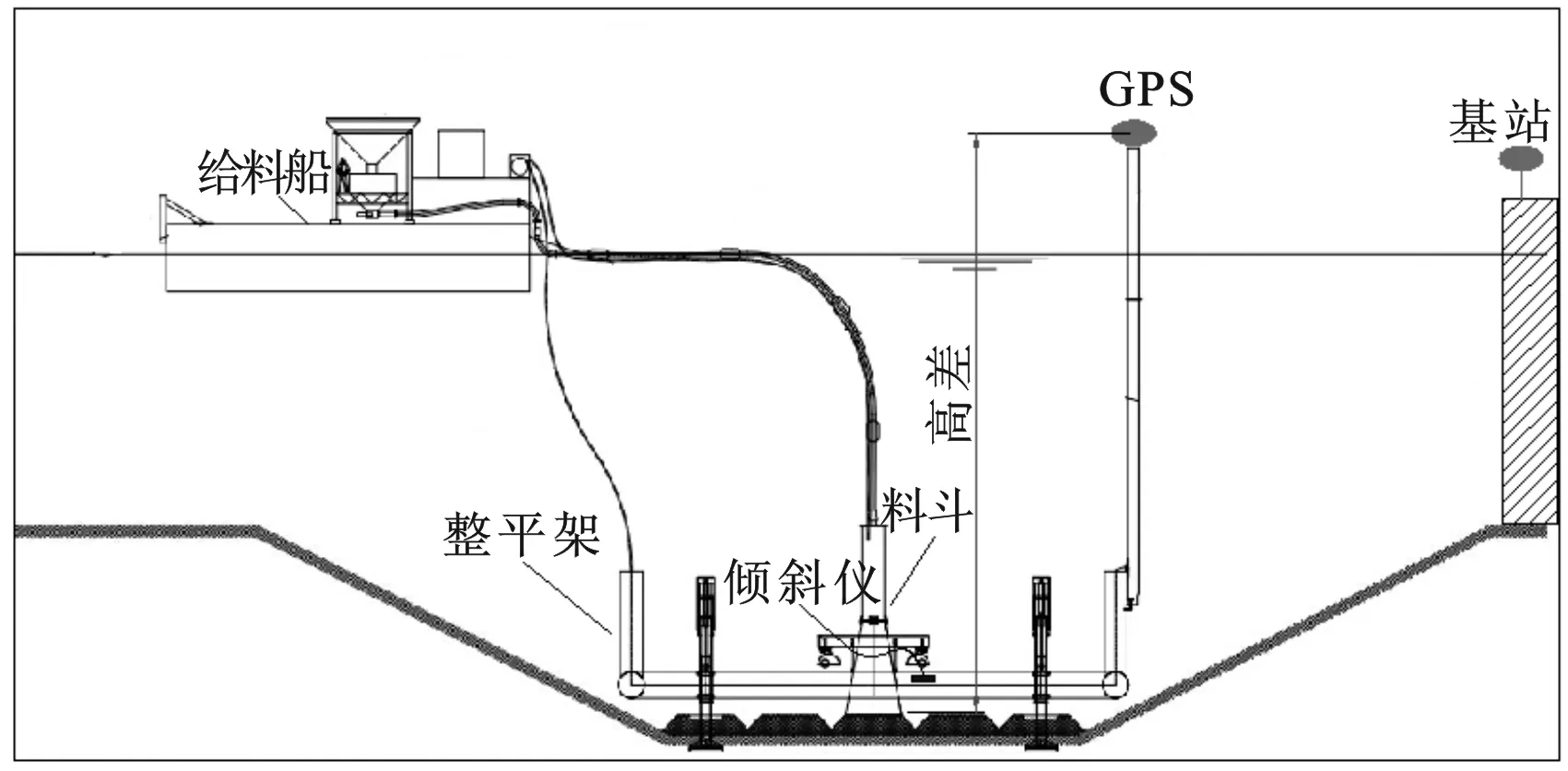
图3 GPS RTK+倾斜仪测量方法
在岸边设立GPS基准站,实时播发差分信息,通过安装在整平架上露出水面的垂直定位杆上的GPS流动站对整平架进行实时三维定位,再根据整平架与料斗之间的相对位置关系和姿态仪数据,推算得到料斗口的实时高程信息,指导整平作业。GPS RTK的高程精度约为20 mm,倾斜仪精度为0.005°(图3)。
设GPS得到的高程值为HGPS,倾斜仪测得的整平架的姿态为横倾R和纵倾P,GPS天线到料斗口的高差为固定值H0,则可按下式计算得到料斗口的高程值H

图4 压力传感器测量方法

(1)
1.2 压力传感器
压力传感器是一种压强测量设备,按照阿基米德原理的液体压强公式
P=ρ×g×h
(2)
式中:P为压力传感器测得的压强值,ρ是水密度,g是重力加速度,h为入水深度。根据这个公式,可以得到整平架的入水深度。
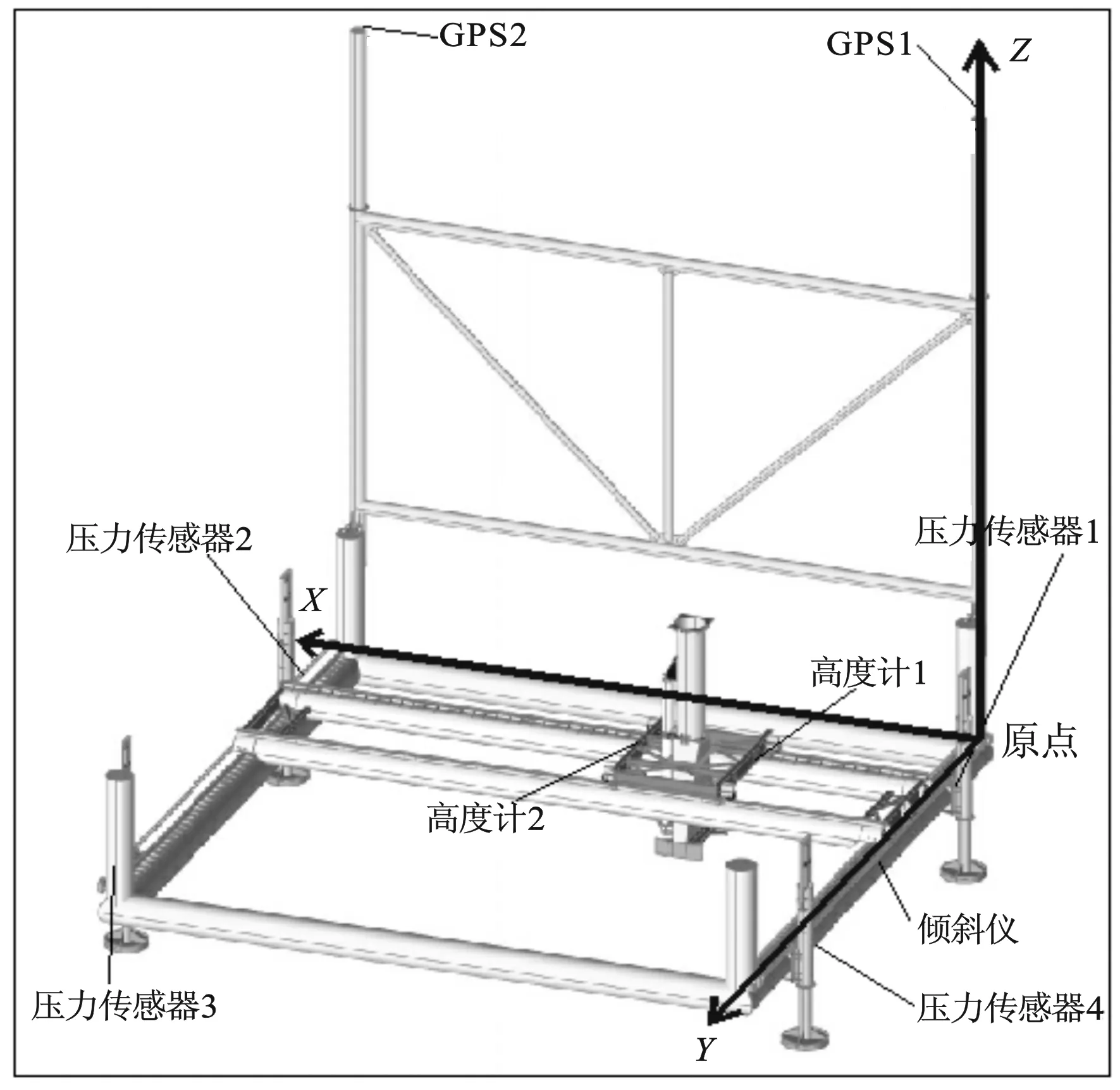
图5 整平架监测设备安装位置及坐标系示意图
在岸边用压力传感器设立验潮站,在整平架上安装多个压力传感器,通过平均海平面将标高信息传递到整平架上,从而得到料斗口的高程。为了减小涌浪的影响,对压力传感器的数据进行平滑滤波。压力传感器精度为0.01%FS,60 m量程的精度为6 mm(图4)。
2 监测设备安装与标定
2.1 监测设备安装
高程监测采用的设备GPS RTK、压力传感器和倾斜仪等,均安装在整平架上;移动料斗上安装2台高度计,用于整平后碎石面的高程检测,设备安装位置如图5所示。
2.2 监测设备标定
整平架上的监测设备安装完成后,下水测试前,在陆地上采用全站仪进行设备的校准和标定,具体方法如下所述。
(1)标定前首先建立整平架三维坐标系,如图5所示,整平前进方向为Y轴,右舷方向为X轴,框体两边轨道顶面为整平架的零基面,Z轴垂直于零基面,向上为正。
(2)设备偏移量取。采用全站仪对整平架上所有的设备进行三维坐标测量,按照整平架的三维模型,获取各个设备的三维偏移量。
(3)倾斜仪校准。用全站仪观测整平架零基面上4个角点的三维坐标,通过调整液压支腿高度,使整平架呈水平状态,记录倾斜仪的数据,通过4个角点的坐标计算出整平架的Pitch和Roll值,与倾斜仪数据进行比对,最终将差值的均值作为倾斜仪的改正值。
(4)GPS RTK天线标定。采用全站仪观测GPS RTK天线在整平架坐标系内的三维坐标。观测时应变换全站仪设站位置和仪器高,取所有结果的均值作为GPS RTK天线的标定值。
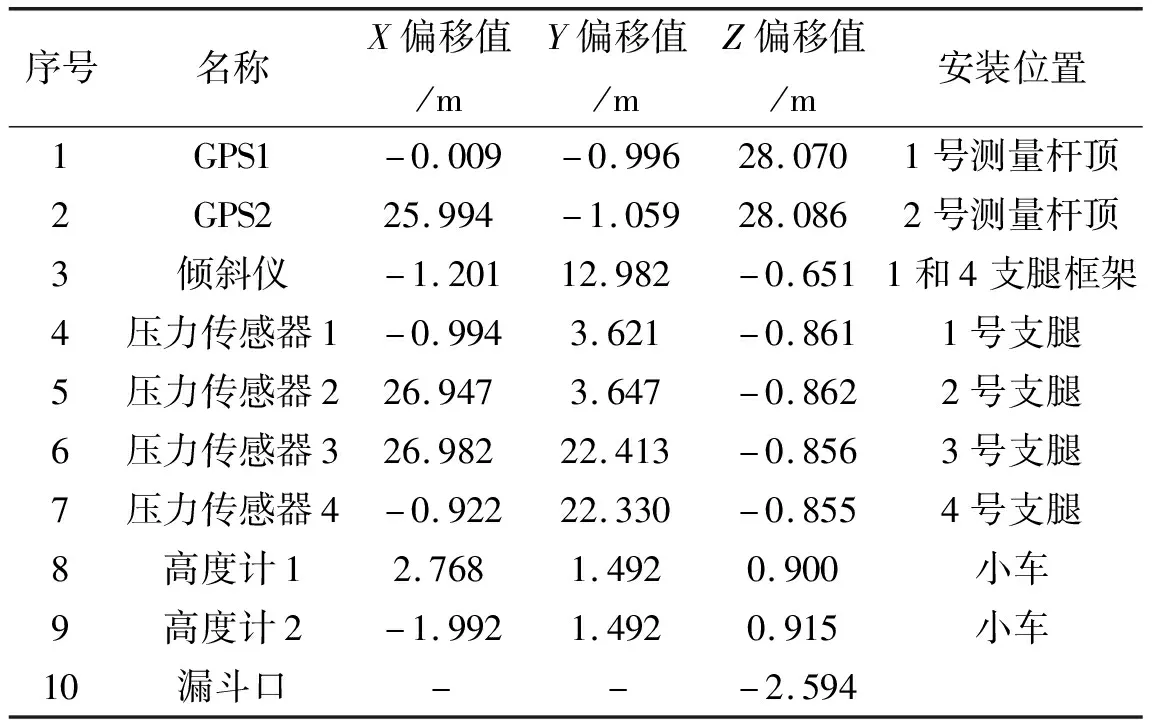
表1 偏移量标定结果
(5)高度计标定。采用全站仪观测高度计和零基面之间的高差,并进行多站观测,取所有结果的均值作为高度计的标定值。
(6)压力传感器标定。作业前将所有压力传感器放在空气中进行大气压测量,分别记录各自初始值进行改正。
本次试验中设备标定结果如表1所示。
3 整平精度测试实验
实验区域为广州珠江某内河码头,在该区域控制点上架设GPS基站,用于整平架测量杆顶部2个GPS RTK进行位置改正;在码头边建立验潮站,通过无线电实时播发水位数据,用于压力传感器高程传递。
整平架入水就位完成后,共铺设了Row2、Row3和Row4等3个条带的碎石,如图6所示,其中阴影部分为铺石区域。Row2铺设设计标高为-1.10 m,Row3铺设设计标高为-0.922 m,Row4铺设设计标高为-0.915 m。
3.1 漏斗口高程推算
用GPS RTK和4个压力传感器2种方式分别推算料斗口的高程,可以作为高程的内符合精度。整平架座底后,GPS RTK推算得到的料斗口高程为-0.794 m,压力传感器1推算为-0.803 m,压力传感器2推算为-0.802 m,压力传感器3推算为-0.782 m,压力传感器4推算为-0.800 m,平均差值11 mm,最大差值为21 mm。该差值包含了设备误差、整平架形变误差等因素,满足设计要求。
3.2 整平后检测
碎石铺设整平结束后,用高度计对碎石面的标高进行检测,以Row3为例进行说明。图7为高度计测量得到的高程与设计高程的断面图。Row3高度计后检测有效采集数据点共186个,其中高度计检测高程与设计高程偏差超过40 mm的12个,平均偏差14 mm,最大偏差69 mm,合格率约为93.5%。

图6 碎石铺设区域
Fig.6 Gravel spreaded area图7 高度计检测高程与设计高程
Fig.7 Altimeter result and designed elevation
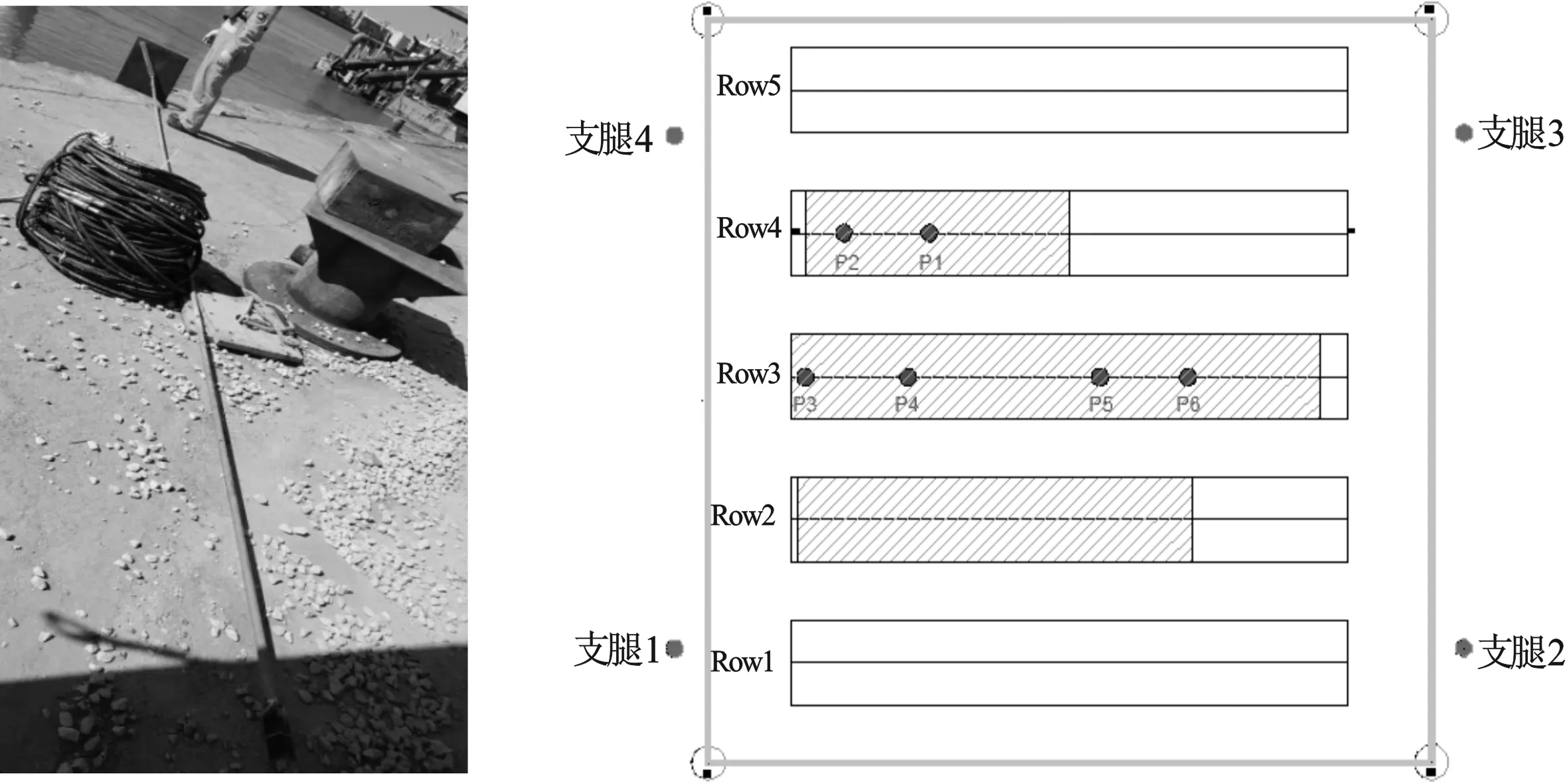
图8 刚性测量杆与测量点位
3.3 测量杆检测

表2 检测结果比对
高度计检测后,采用潜水员辅助刚性测量杆的方式,在岸边用全站仪检测了碎石基础的标高,本次检测共选取了6个点(图8)。
高度计和测量杆两种方式可以作为高程的外符合精度检测。表2中列出了每个点的设计标高、高度计检测结果、测量杆全站仪检测结果及差值。从表中可以看出,高度计与全站仪检测结果最大差值15 mm,平均差值7.8 mm;全站仪检测结果与设计标高最大差值34 mm,平均差值17.5 mm,6个检测点的误差均满足设计要求。
4 结论
本次实验通过高度计和刚性测量杆两种方式检测了碎石整平后的效果,高度计是整体检测,刚性测量杆是任意选点检测,两种检测结果的符合性满足设计要求,验证了GPS RTK和压力传感器两种整平监测方法的可行性,为今后水下基础整平类的项目提供了借鉴。
本次实验中仍然存在部分高程超限点,下一步要在减小误差、提高精度、整平架形变修正、平均海平面高程传递等方面继续开展研究,提高高程的准确性,以便在今后施工中提升整平的合格率,减少二次返工,提高碎石整平作业效率。