智能互动定性定量分析三维立体成像导航技术支持下三维腹腔镜对比达芬奇机器人辅助技术在肾癌保留肾单位手术中的应用
2020-06-08杨启维曹建伟干思舜崔心刚
杨启维 杨 炜 曹建伟 褚 健 干思舜 崔心刚
目前,智能互动定性定量分析(intelligent/interactive qualitative and quantitative analysis, IQQA)三维立体成像导航技术飞速发展,该技术基于患者术前CT或MRI等影像学资料,利用云端分析软件合成精细的三维立体模拟图形,根据需求隐去次要结构、凸显重要组织结构,获取更加科学逼真的术前规划图像,以制订更为精准合适的手术方案[1]。腹腔镜下肾癌保留肾单位手术(laparoscopic nephron-sparing surgery, LNSS)相较于开放手术具有微创的特点,但最早应用于临床的二维腹腔镜只能提供二维平面图像,缺乏立体纵深感,主刀医师需要在不断的试探中获得深度,以及周围脏器的毗邻关系,增大了手术误伤风险,延长了手术操作时间[2]。随着三维技术应用于腹腔镜器械,三维腹腔镜能够实现腹腔内脏器立体视野的展现,使术者在视觉上获得脏器深度感,对脏器之间的毗邻关系有了更加全面的认识[3]。达芬奇机器人辅助技术行保留肾单位手术(robotic assisted nephron-sparing surgery, RANSS)凭借其三维立体放大的视野、高灵活度的机械手在肾癌手术中显示出巨大优势[4],但其购置费用较高导致手术费用较高。本研究旨在对比IQQA三维立体成像导航技术支持下使用三维腹腔镜行肾癌保留肾单位手术(3DLNSS)与RANSS的治疗效果,以及在医疗机构的应用价值。
1 对象与方法
1.1 研究对象 回顾性分析2016年2月—2019年6月海军军医大学第一附属医院、海军军医大学第二附属医院、海军军医大学第三附属医院和海军军医大学附属公利医院收治的163例肾癌患者的资料,其中男91例,女72例;年龄34~78岁,平均年龄为(51±11)岁;根据手术方式分为3DLNSS组85例, RANSS组78例。手术均由副主任医师职称以上的高年资医师主刀完成,术者均具有超过100例LNSS或RANSS的手术经验。纳入标准:①术前CT检查证实为肾癌;②术前血常规、肝肾功能和凝血功能指标均无异常,不伴有尿路感染;③术前心电图、胸部X线摄片、肺功能,以及腹部超声和心脏彩色多普勒超声检查均无明显异常;④术前血压、血糖控制良好,不伴有其他严重心肺和代谢性疾病;⑤术前评估可以接受保留肾单位手术;⑥肿瘤TNM分期为T1N0M0。排除标准:①肿瘤发生远处转移;②肾脏多发肿瘤;③术前有肝肾功能不全或孤立肾;④心、肺功能不全;⑤有严重的脊柱畸形等疾病;⑥尿路感染不能有效控制;⑦出凝血功能指标异常;⑧肾部分切除术后复发肿瘤,或既往曾行腹部其他手术。
1.2 手术方案制订 所有患者均完成入院常规实验室检查和心电图、胸部X线摄片、肺功能、心脏和腹部超声,以及肾动脉CTA等检查。
1.2.1 IQQA图像分析过程 将术前患者肾动脉CTA检查获得的原始二维的医学数字成像与通信(DICOM)影像(美国通用电气公司)连续导入IQQA-三维多参数评估软件制订虚拟手术方案,该软件支持远程登录,可以实现主刀医师与专业三维技术团队间的实时互动。软件对肾脏形态和空间毗邻结构、肿瘤和供应血管、肾门部血管走形和分支进行三维重建和系统分析。见图1。主刀医师根据IQQA结果制订手术方案,术前谈话时通过计算机向家属进行动态演示,使家属更加直观地认识手术难点和风险所在,充分了解手术方案后签署知情同意书。

A 患肾矢状面CT影像 B 双肾冠状面CT影像 C 双肾横断面CT影像 D IQQA重建患肾与大血管的关系图1 通过IQQA精准手术规划智能云终端获取三维重建和数据分析的影像
1.2.2 3DLNSS组手术方案 手术采用高清三维腹腔镜光学双通道成像系统(德国卡尔史托斯公司),配合常规腹腔镜器械,以及显示器、控制器、冷光源、摄像头、三维眼镜等。根据IQQA结果采取经腹腔或经后腹腔入路进行手术,同时根据IQQA数据选择阻断肾动脉主干或其分支。
1.2.3 RANSS组手术方案 根据海军军医大学泌尿外科中心研究[1]结果,认为经腹腔途径的手术空间较大,更适合机器人手术。于达芬奇机器人(美国直觉公司)辅助技术下进行手术,手术均采取经腹腔入路。
1.3 手术方法 两组均于打开肾周筋膜和游离肾周脂肪后,游离肾动脉及其分支,以动脉阻断钳阻断肾动脉或其分支,以冷刀配合吸引器沿肿瘤外周0.5 cm正常肾组织开始剪切肿瘤,完整切除肿瘤连同周围0.5 cm肾组织及其覆盖的脂肪组织。采用改良的“2+1”缝合方式缝合,即第1层采用倒刺线大间距快速连续缝合肾脏内层创缘,主要缝合肾实质或集合系统;第2层在第1层的基础上,于肾脏外缘包膜进针,大间距快速缝合肾脏外层创缘,由于进针、出针主要在肾脏创缘外侧,所以拉线可以更进一步对合创缘,线的首尾用hemlock夹固定,此时松解动脉阻断钳,恢复肾脏血供;第3层采用较密集的针距加固缝合肾脏外层,缝合方向与第2层交叉成八字形。取出标本,放置引流管,依次缝合切口。两组患者均顺利完成手术,无中转开放手术。
1.4 观察指标 收集两组患者的一般资料(性别构成、年龄、BMI)和肿瘤情况[肿瘤直径、PADUA(preoperative aspects and dimensions used for an anatomical)评分、R.E.N.A.L评分、肿瘤位置及其生长属性],记录两组患者手术时间、术中热缺血时间、术中出血量、手术接台时间、手术费用、记录术后留置导尿管时间、术后拔除负压引流管时间、术后住院天数、手术前和术后半年血肌酐水平、手术前和术后半年术侧肾脏GFR、术后并发症、术后病理检查结果。

2 结 果
2.1 两组患者的一般资料和肿瘤情况比较 两组间患者的年龄、性别构成、BMI、肿瘤直径、PADUA评分、R.E.N.A.L评分、肿瘤位置、肿瘤生长属性的差异均无统计学意义(P值均>0.05)。见表1。

表1 两组患者一般资料和肿瘤情况的比较
2.2 两组患者的术中和术后指标比较 两组间患者的手术时间、术中热缺血时间、术中出血量的差异均无统计学意义(P值均>0.05); 3DLNSS组的手术接台时间显著短于RANSS组(P<0.001); 3DLNSS组手术费用显著低于RANSS组(P<0.001)。两组间术后留置导尿管时间、术后拔除负压引流管时间、术后住院天数、术前和术后半年血清肌酐水平及其差值、术前和术后半年术侧肾脏GFR及其差值、术后并发症发生率,以及病理类型的差异均无统计学意义(P值均>0.05)。所有患者术后切缘均提示阴性。见表2、3。


组别N手术时间(min)术中热缺血时间(min)术中出血量(mL)手术接台时间(min)手术费用(千元)术后禁食时间(d)3DLNSS85114.4±21.518.0±5.7120.7±21.732.3±7.2①34.7±5.9①1.6±0.6RANSS78104.0±20.216.7±6.8131.2±25.959.8±3.865.4±9.32.0±0.7
与RANSS组比较:①P<0.001
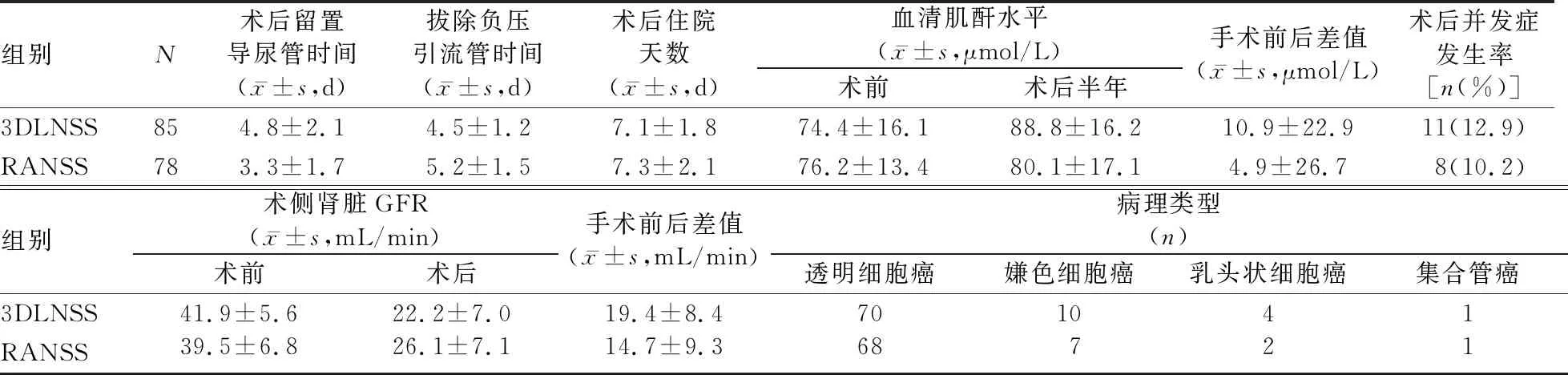
表3 两组患者的术后指标比较
3 讨 论
肾癌的术前诊断正经历着重大变化,IQQA三维重建技术可用于术前三维重建和制定虚拟诊疗计划,IQQA三维系统分析软件由美国EDDA公司开发,均已经美国FDA和中国国家食品药品监督管理局批准而应用于临床。该技术基于二维原始DICOM轴数字影像进行交互式重叠视图,根据多切面计算机断层CT影像自动分割肾脏结构,分段的肾脏解剖结构再进行三维重建,使术者对肾脏的形态结构和肿瘤位置有了更深刻的认识[1]。IQQA智能分析系统存在以下优势:①自带几何算法绘制出肾脏血管树,再智能分析出肾门部大血管所对应的供应肾脏节段;②三维立体显示肿瘤及其边界,术者可以根据三维图像制定虚拟切除边界;③术前谈话更加直观。
欧洲泌尿外科学会(EAU)和美国泌尿外科学会(AUA)推荐将保留肾单位手术作为T1期肾肿瘤的标准术式[5]。研究[6]显示,与行肾癌根治术的患者相比,接受肾部分切除术的患者总生存期更长,且肾功能得到有效保护,生命质量明显改善,CKD和心血管事件发生率明显降低。腹腔镜保留肾单位手术比开放保留肾单位手术更有利于患者术后肾功能的恢复,且具有创伤小、恢复快、术后疼痛减轻等优势[7]。相对于传统二维腹腔镜保留肾单位手术(2DLNSS),三维腹腔镜恢复了裸眼的立体视觉,提供了手术区域更好的深度感和脏器立体毗邻关系, 3DLNSS的术中热缺血时间更短,手术操作失误率更低,且缩短了手术操作时间[8]。
近年来,达芬奇机器人手术系统在国内大城市三级甲等医院中推广应用,其优势总结如下。①成像清晰:其自带三维立体视野,让主刀医师观看到更加直观、高清、放大的手术区域景象[9]。②操作灵活:其机械臂360°自由旋转,超越了人手的灵活程度,完成腹腔镜器械难以完成的动作[10]。③除抖防颤:智能臂可以有效避免术者手部的颤抖,使得切除、缝合、持针等操作更加流畅自如[11]。④“主刀扶镜”:机器人的摄像头完全由主刀医师自己控制,有效避免了扶镜手经验不足,或者扶镜手与主刀医师之间配合不默契而影响手术进程。⑤更易掌握:机器人操作相较于腹腔镜操作具有更短的学习曲线[12]。尽管机器人存在诸多优势,但Tufek等[13]研究指出,对于T1b期肾癌进行保留肾单位手术,腹腔镜和机器人手术后,患者具有相似的肿瘤无进展生存率和肾功能保护率。
机器人辅助外科手术是微创手术发展的趋势,但其应用目前仍存在局限性:①设备购置费用昂贵,较难在三级以下医院普遍开展;②手术费用高于腹腔镜手术和开放手术,加重了患者的经济负担;③触觉反馈力缺失,使得操作误伤风险高于腹腔镜手术,尤其对于没有接受过腹腔镜系统训练的初学者,由于对腹腔内脏器的解剖、质地、柔韧度等缺乏认识,极易在切割、牵拉、缝合等操作过程中损伤腹腔内脏器,主刀医师无法感知机械臂的发力[14];④国内绝大多数三级甲等医院每家只配备有一台机器人手术系统,供外科各科室使用,同一科室不同主刀医师需轮流使用,由于患者数量众多,等待手术排期时间较长,而肾癌属于限期手术,如不能及时手术,肿瘤浸润转移风险必然上升,不利于患者的预后[15];⑤两台接台的机器人辅助外科手术之间的准备时间较长,接台手术较晚,造成夜间手术和术者疲惫等,不利于手术的精细操作,不能保证手术的质量和安全性;⑥海军军医大学泌尿外科中心总结机器人辅助保留肾单位手术适合采用经腹腔途径,后腹腔途径空间狭小,操作较难,这在一定程度上限制了其在肾脏背侧肿瘤手术中的应用[1]。
基于以上原因,IQQA三维立体成像导航技术支持下行三维腹腔镜就具有较大优势:①IQQA与术前诊断和术前准备可以同时进行,不影响限期手术日期;②随着显像技术的不断提高,三维立体视野不亚于机器人手术系统的视野[16];③两台手术之间的准备时间与传统腹腔镜、开放手术没有区别,本研究结果显示,3DLNSS组的手术接台时间显著短于RANSS组,可使接台手术尽早开展,术者在白天以较充沛的精力完成手术,极大地保证了手术的质量和安全性;④随着手术操作器械的不断改进,其操作的舒适性不断接近机器人手术系统的操作臂,且其自然具备的触觉反馈力属性是目前机器人手术系统尚未具备的,初学者可以通过操作器械对腹腔内脏器的质地获得较为直观的感受[17];⑤经腹腔和经后腹腔途径的三维腹腔手术都可以获得满意的手术空间,所以其对于肾脏腹侧和背侧肿瘤均适用[18];⑥手术费用与开放手术、传统腹腔镜手术相近,本研究结果显示,3DLNSS组手术费用显著低于RANSS组,极大地减轻了患者的经济负担;⑦可以作为替代机器人辅助手术的手术方式,使得肾癌的限期手术尽快进行;⑧价格较低,更适合在三级以下医院普遍开展,更便捷地提升全民健康保障。
本研究依然存在许多不足:①研究样本量过小,不能排除发生偏倚,有待后续研究进一步扩大样本量;②后期随访时间较短,由于研究开展至今不足3年,所以本研究中患者的预后缺乏长期随访,故长期预后作为重要的研究指标没有纳入本研究。
综上所述,通过本研究初步得出三维立体成像导航技术支持下对肾癌患者行三维腹腔镜保留肾单位手术,相较于达芬奇机器人辅助手术更适合在三级以下医院逐步推广开展,在减轻患者经济负担等方面具有较大优势。
(该论文经审稿,已入选“春蕾杯”科研论文评比)
