Smart3D在空三解算及模型生产方面的探讨
2020-06-08李新宁权君娟
李新宁 权君娟
(宝鸡西北有色七一七总队有限公司 宝鸡 721015)
1 引言
倾斜摄影测量能够实时快速获取地面地物的位置、正侧面纹理等诸多信息,通过GPS测量和后期软件的处理,可以生产出真实纹理的高精度地物三维模型,为BIM、城市三维模型重建、测图等提供了现实三维基础,因此在规划、国土、交通、电力等多个部门得到广泛的应用。为了推动倾斜摄影测量技术的发展,不少软硬件厂家都提出了自己的解决方案,如中海达的iFly D6 六旋翼无人机+iCam Q5 五镜头相机、南方测绘公司的天行HO1300 八旋翼无人机+T51五镜头相机、武汉点云科技有限公司的SkyPhoto全套内业处理软件、Bentley 旗下的Smart3D 系列软件。
本文主要探讨倾斜摄影测量内业处理的前期工作,运用常用的专业软件Smart3D对某一研究区域进行空三解算和模型生产,介绍其中的工作流程、生产效率、精度检测等。
2 背景
为了试验倾斜摄影测量技术在1:500 地形图测绘的可行性,选取了建筑密度约30%、正射像片主点所覆盖面积约0.2 平方公里的某一村庄进行试验。外业航拍采用多旋翼无人机+五镜头相机;设计像片的地面分辨率为3厘米,航向重叠度和旁向重叠度均为75%。航拍和测量结束后统计:每个镜头的像片数是227张,共1135张,每张像片的像素约2千万,外业布测了8个像控点。
空三解算和模型生产对计算机的要求很高,软件的安装和试验工程数据均在固态硬盘上。试验采用的计算机,其主要配置如下表:

Smart3D 是一款基于图形运算单元(GPU)的快速三维场景运算软件[1],具有处理精度高、纹理真实、自动化程度高、输出格式多样化等优点。Smart3D系列软件包括Master(主控台)、Setting(设置)、Engine(引擎)、Viewer(浏览)、Editor(修模)等。Bentley 公司将其收购后不断更新版本,本文使用的版本是4.4.6.845中文版。
3 项目设置
(1)像片处理
外业像片是由一个正射镜头和四个倾斜镜头拍摄出来,不同镜头的相机参数会有所不同,因此按镜头将像片放置在五个不同的文件夹中,不同镜头的像片名称其前缀尽量保持不同,可以采用ACDSee等软件进行批量重命名。如果天气忽明忽暗等原因引起像片色调差异偏大,则需采用易拼图等专业软件进行匀光匀色处理。
(2)创建工程及设置
打开主控台Master,创建新工程,工程名称不能为中文,确定好名称和路径后进入主界面。
“影像”节点下添加整个目录,将五个镜头的像片添加到五个不同的影像组,正射照片所在的影像组建议排在第一位,方便初次刺入像控点。添加完成后软件自动根据像片的EXIF 识别出每个影像组的相机信息。
4 刺像控点与空三解算
该实验有8个像控点,均匀分布在测区范围内的平坦位置上,每个像控点对应的正射和倾斜像片达几十张,如果每个像控点人工从1135 张像片找出对应的几十张并刺入相应位置,是极其耗时且容易出错。因此该步骤主要方式为:初次刺入三四个像控点对应的正射照片位置,空三解算后预测出所有像控点所在像片的坐标,然后根据预测坐标将所有像控点刺入相应位置,最后再次空三解算[2]。
(1)初次刺点与空三
在主界面的“Surveys”节点下,点击“编辑控制点”,软件自动弹出“控制点编辑器”窗口,导入像控点坐标文件,并设定好空间参考系统,选择容易判读的三个像控点,在正射像片上刺入。检查无误后保存并退出控制点编辑器,返回主界面中提交空中三角测量,里面的“定位/地理参考”选项中选择“使用控制点进行平差”,其余默认设置,开启引擎Engine,计算机则自动运行空三解算。
测绘行业中像控点坐标常采用高斯投影坐标系或地方坐标系,Smart3D导入像控点后一定要选择空间参考系统,如果是地方坐标系则要输入椭球参数、中央子午线、横坐标偏移量等。不能默认选择笛卡尔坐标系,否则坐标离原点(0,0)越远,模型失真程度越高,这现象与Smart3D的算法有关。
(2)二次刺点与空三
因为初次刺点出来的空三精度是较低的,所以需要刺上所有像控点涉及的正射和倾斜像片,这样出来的空三精度才很高。打开控制点编辑器,查看初次刺点的三个像控点有无粗差,无粗差后在“显示影像”选择“可能是视点”,在控制点列表中点选某一像控点,则软件将该点涉及正射和倾斜像片的位置全部预估出来并显示在影像列表中,逐一选择影像,以影像上点的清晰程度决定是否刺上该像控点。无误后再次按默认设置提交空中三角测量。
Smart3D空中三角测量包括影像关键点提取、相对定向、绝对定向、像主点坐标计算等。空三效率方面,Smart3D 4.4版本比历史版本提高了不少,该计算机配置下1135张像片的一次空三解算时间约为半小时。
5 三维模型的生产
倾斜摄影无论是测图还是三维城市建模等,都是基于可视化三维立体模型上进行。Smart3D 在精确的空三解算后能够输出OBJ、OSGB、3MX等诸多格式的三维模型。
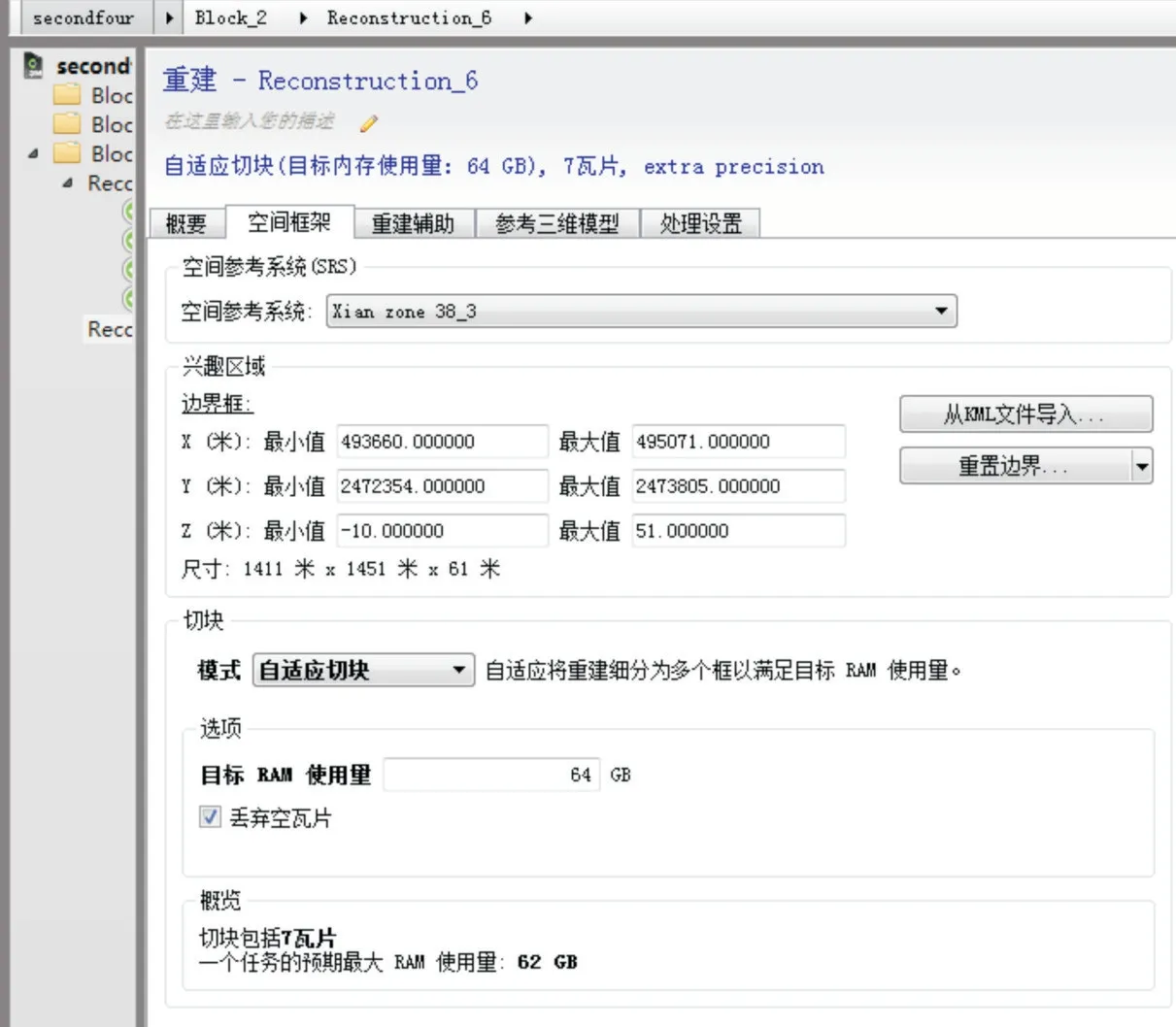
图1 三维模型生成中的空间框架设置
主界面的概要节点中,点击“新建重建项目”,因为数据量较大不能一次性生成一个整体三维模型,需切块。在“重建”界面的空间框架节点中,空间参考系设为导入像控点时的坐标系,切块模式为“自适应切块”,目标RAM 使用量设置为计算机的内存“64 GB”,软件根据设置自动划分成几个瓦片,如图1 所示。然后转移到“重建”界面的概要节点,点击“提交新的生产项目”,目的选择“三维网络”、格式选择所需的三维模型格式、空间参考系统选择导入像控点时的坐标系,其余默认后提交给计算机。该步骤计算机自动运行,需开启引擎Engine,是最耗时间的一步,实验中选择纹理压缩为“JPEG质量70%”,生成的OSGB模型所需时间约为9小时。
如果还要生成其他格式的三维模型,需再次提交新的生产项目,所耗时间比初次三维模型生产的时间少很多,如实验中后续提交的S3C 格式三维模型,生产时间约为1小时。S3C 格式三维模型可以直接在Viewer浏览器中查看效果。
因为该实验是为1:500地形图服务的,所以还需生成正射影像,提交新的生产项目后,目的选择“正射影像/DSM”、采样距离设置为0.05 米、正射影像的颜色源选择“Optimized computation(visible colors)”、不勾选“DSM”。生产正射影像的时间约为1.5小时。
6 精度检测
为了验证模型的平面精度和高程精度,在现场采集了34 个球场分界线、水泥地块分界线等明显平面地物点坐标。然后把模型导入清华山维EPS软件中测量,将现场坐标与软件测量值对比算出:模型的平面中误差为0.041米,高程中误差为0.036米。
地形图的平面精度检测主要是通过房角点、围墙拐点等明显特征点的误差计算得出,为此现场采集了28个该特征点。清华山维EPS倾斜三维测图的作业方式是通过房屋边线、围墙边线交汇出特征点,将现场特征点的平面坐标与EPS 测图的坐标对比,算出地形图的平面中误差为0.056米。
7 结论
通过试验和精度检测得出:利用Smart3D进行空三解算和三维模型生产,可以为大比例尺测图、三维城市重建等工作提供了厘米级精度、纹理真实的现实三维实景基础。这在实践生产中具有一定的指导意义,为倾斜摄影测量技术的发展起到了积极推动的作用。
但是Smart3D 出来的模型还有一些不足之处:(1)大面积水域如鱼塘存在空洞现象[3];(2)茂密植被处难以匹配模型或难以看到地表;(3)对计算机配置要求很高且模型生产效率较低;(4)报告成果内容较为简单,无像主点坐标、连接点坐标等信息。随着技术的不断进步,相信这些不足之处都会得到解决。