基于时空节点选择和深度学习的城市道路短时交通流预测
2020-06-07高悦尔
曹 堉,王 成*,王 鑫,高悦尔
(1.华侨大学计算机科学与技术学院,福建厦门361021; 2.华侨大学建筑学院,福建厦门361021)
(∗通信作者电子邮箱wangcheng@hqu.edu.cn)
0 引言
随着交通需求的与日俱增,大量的交通需求与有限的交通供应之间的不平衡造成了交通拥堵。交通拥堵不仅会导致社会诸项功能的衰退而且还将引发城市生存环境的持续恶化。为了避免拥堵带来的不良后果,根据道路的相关信息提前预知下一时段的交通流状况,对缓解城市道路交通拥堵具有重要的现实意义和理论研究价值。
迄今为止,己经有许多理论和方法应用于短时交通流预测,例如历史平均模型、线性回归模型、神经网络、支持向量机(Support Vector Machine,SVM)预测等[1-4],但使用单一模型有些无法反映数据特征的非线性关系,以及不确定性;有些则是对具有时间序列特征的数据不能较好表达。而将两种或者两种以上预测方法组合起来,可以发挥各自的优点,克服各自的缺陷,以达到更加理想的预测效果[5-6]。与此同时,在实际情况中道路交通流的影响情况错综复杂,道路交通流受多种因素影响,其中不仅包括时间相关影响因素也包括空间相关影响因素。现有的城市道路交通流短时预测研究在时空分析中,多以主观经验选择[7-8]。在时间上,选择以预测时段的前2周期的交通流为输入参数,并且对于不同距离的道路断面所采用的时段相同;在空间上,基本采用与待预测路段直接相邻道路至待预测路段的交通流为基础,没有考虑其他路段可能的影响[9]。然而每一路段都不是孤立存在的,属于整个交通路网的一部分,研究对于交通流的影响关系没有进行详细分析以及道路组成的复杂性考虑不全面。
因此,本文将对交通流特性详细分析,在此基础上确定影响的时间空间范围和候选时空节点集合并使用包裹式特征选择方法和反向传播神经网络模型(Back Propagation Neural Network,BPNN)[10]来提升预测精度。
本文的主要贡献如下:
1)对交通流的交通流时空特性进行详细的分析,通过分析结果完善预测交通流所需数据,选择有效的候选时空节点集合。
2)提出了一种时空节点选择和深度学习的城市道路交通流短时预测方法,运用时空特征选择得出交通流预测结果。
3)对比应用不同数据及模型的实验结果验证本文方法可以有效提升预测准确性。
1 问题的形式化描述
1.1 基于传统方法的交通流预测及其存在的问题
由交通流机理分析可知,若是要获得路段a在[t,t+Δt]时段的交通流就要知道在该时段能够流入该路段的不同路段的交通量(假设路段a的交通流只能通过路段b和路段c进入,从路段f流出,路段位置示意见图1),即:

其中:qa[t,t+ Δt]为[t,t+ Δt]时段路段a的车流量,qa[t-Δt,t]为[t- Δt,t]时段路段a的车流量,qb⁃a[t,t+ Δt]为[t,t+Δt]时段路段b流入路段a通过检测点的车流量,qc⁃a[t,t+ Δt]为[t,t+Δt]时段路段c流入路段a通过检测点的车流量,qa⁃f[t,t+ Δt]为[t,t+ Δt]时段路段a流入路段f通过检测点的车流量。
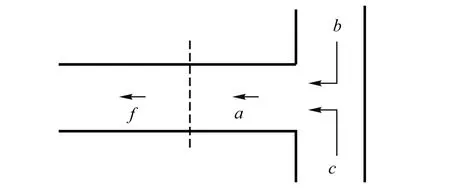
图1 路段位置示意图Fig.1 Schematic diagram of road section location
路段b和c的[t,t+Δt]时段的车流量又是从能够与之相连的道路车流影响得出,而[t,t+Δt]时段的交通流为未发生事件无法获取数据,因此多从路段本身的历史规律并使用带时间序列的交通流变化趋势加上部分不确定影响因素来求解q[t,t+ Δt],即 影 响 为f(δ,r∗q[t- Δt,t],r∗q[t-2Δt,t-Δt],r∗q[t-3Δt,t-2Δt],…)其中,q为某时段的交通流,Δt为一个周期时段长,r为各时段的交通流增减趋势,δ为交通流的不确定性车流增减变量。
在此情况下交通流变化趋势、r和δ等量无法直接测量获得,且利用平峰或高峰一种状态下建立的理论或者仿真模型存在过拟合的嫌疑和模型推广性适应性问题。
1.2 基于数据驱动的交通流预测的问题的形式化描述
问题模型 道路的短时交通流预测是要根据研究区域范围内有影响关系的道路交通流空间节点{1,2,…,j,…,n}对应的时空交通流{q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[t-mΔt,t-(m-1)Δt], …,qj[t-Δt,t],… ,qj[t-mΔt,t-(m-1)Δt],… ,qn[t- Δt,t],… ,qn[t-mΔt,t-(m-1)Δt]}(Δt为时间间隔,n为空间节点个数,m为时间段个数),预测出待预测道路空间节点j未来时段[t,t+Δt]的交通流量qj[t,t+Δt](如图2)。
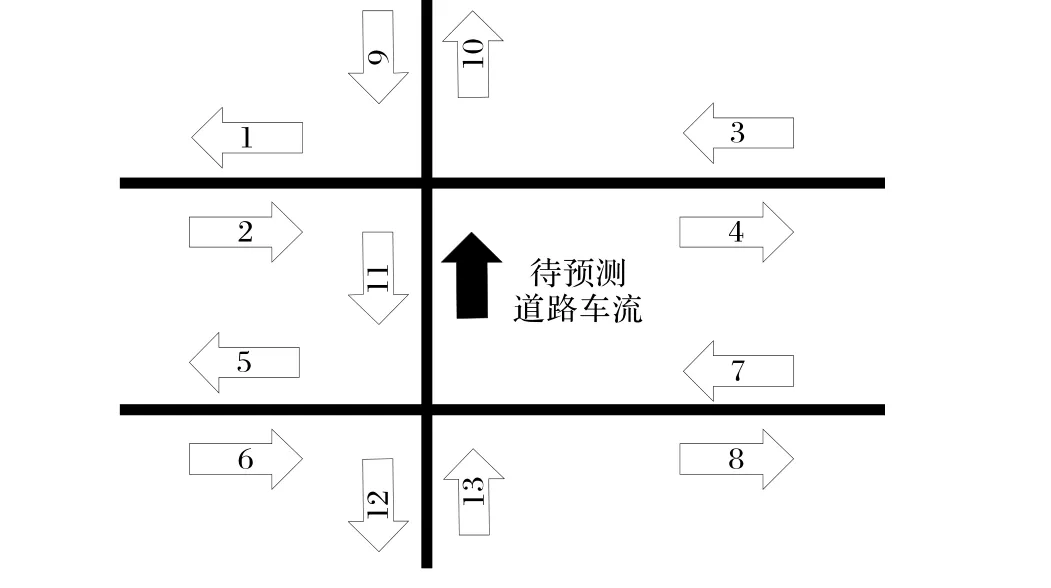
图2 空间节点示意图Fig.2 Schematic diagram of spatial nodes
该问题的难点在于:道路交通流空间节点{1,2,…,j,…,n}在最接近预测时段的前m个时间段对应的时空交通流{q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t-Δt,t],…,q2[t-mΔt,t-(m-1)Δt],…,qj[t-Δt,t],…,qj[tmΔt,t-(m-1)Δt],…,qn[t- Δt,t],…,qn[t-mΔt,t-(m-1)Δt]}与待预测道路空间节点j在[t,t+ Δt]时段的交通流量qj[t,t+Δt]之间存在复杂的影响关系,每个时空交通流的影响强弱不同;与此同时,由于交通流特性的不同,单一模型不能很好地适应其需求,也需要选取合适的方法模型充分利用交通流的特性。
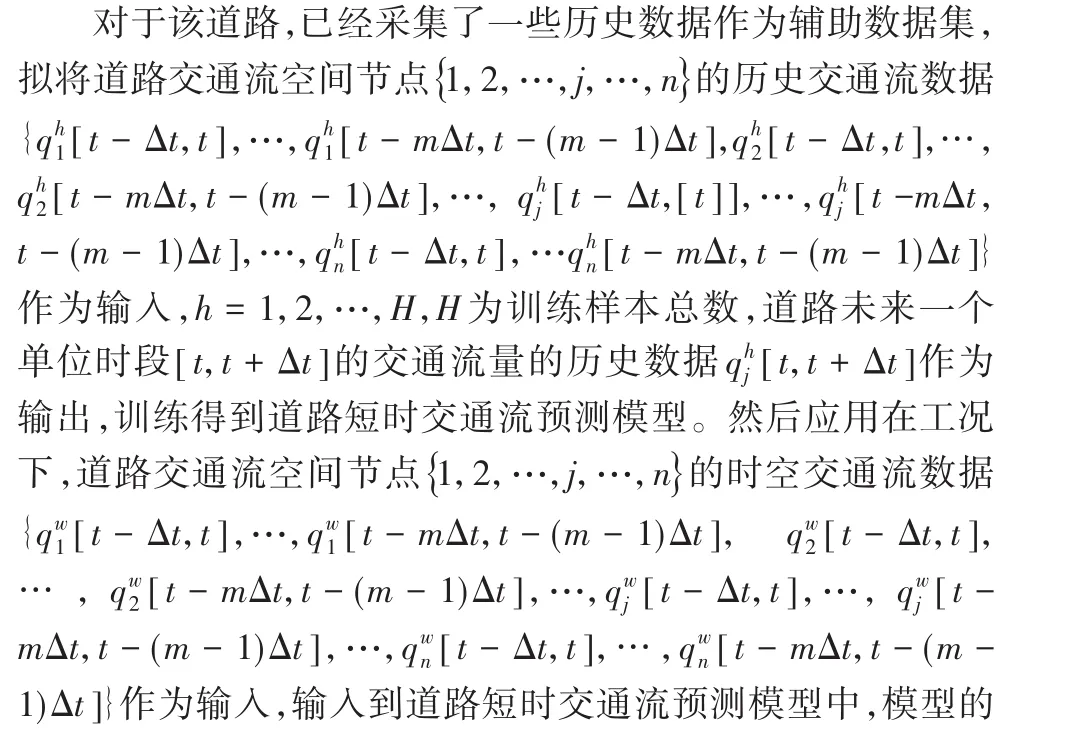

即道路短时交通流预测问题的关键是时间间隔Δt和时间段个数m的确定和空间节点{1,2,…,j,…,n}的选择,以及预测模型的建立方法。
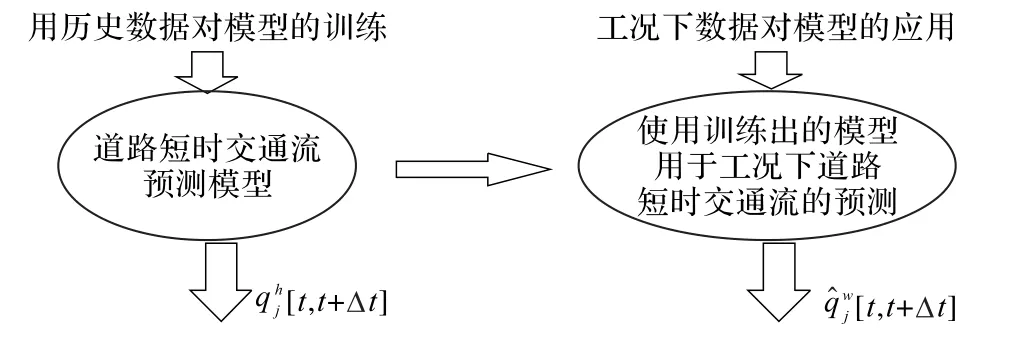
图3 基于数据驱动的道路交通流短时预测问题的模型Fig.3 Data-driven model for short-termprediction of road traffic flow
2 基于相关性及包裹式的交通流时空节点选择
2.1 交通流时空相关性分析
2.1.1 时间相关性分析
交通流的时变性很强,具有明显的趋势和连贯性。本文截取安徽省宣城市开放数据集某道路断面的一日交通流数据[11],对这些数据进行分析,进一步明确交通流时间变化特性。
如图4所示,在平均工作日每日的交通流的一天之中交通流会出现高峰现象,机动车数量剧增;同时,白天的交通流相对较多,随时间变化比较显著,夜晚的交通流相对较少,随时间变化比较平稳。可知,交通流的时变性很强,具有明显的趋势和连贯性。同时,城市道路交通流是以人参与为主,人的出行习惯和规律在一定程度上影响了交通流的变化规律性。由于上下班及其他社会活动在工作日交通流变化曲线波形也是基本相似的。但人们的行为通常具有不确定性,由于路线选择的变更,出行目的地的不同,都会造成人们出行行为发生改变,从而导致交通流的不确定性。因而交通流受此影响,也具备一定的随机不确定性。
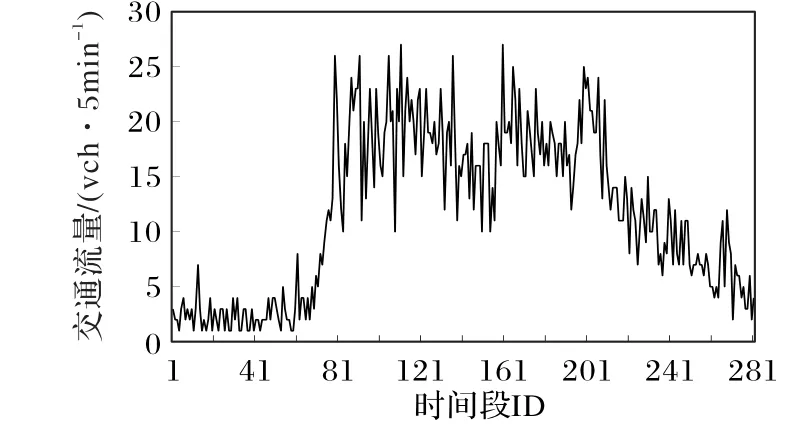
图4 工作日交通流变化曲线Fig.4 Workingday traffic flow curve
由交通流的时间相关性分析可知,对路段的交通流进行预测可以利用路段本身的历史数据:根据该路段自身的交通流周期性、相似性以及带时间序列的交通流变化趋势加上部分不确定影响因素对路段未来交通流存在影响,即qj[t-Δt,t],qj[t-2Δt,t- Δt],…,qj[t-mΔt,t-(m-1)Δt] 影 响了qj[t,t+ Δt]。
2.1.2 空间相关性分析
由式(1)可知,对路段的交通流进行预测可以利用具有相关关系的其他路段的数据。同时,其他路段的时间序列趋势对不同路段并没有直接的相关关系,有关的只是在下一时段能够到达预测路段的交通量,因此不需考虑其他路段的r和δ,考虑的是各个有相关关系的路段在不同时段通过的交通流并 对qj[t,t+Δt]造 成 影 响 的 交 通 流 ,即 {q1[t-Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],… ,q2[tmΔt,t-(m-1)Δt],… ,qj-1[t- Δt,t],… ,qj-1[t-mΔt,t-(m-1)Δt],qj+1[t- Δt,t],…,qj+1[t-mΔt,t-(m-1)Δt],…,qn[t- Δt,t],…qn[t-mΔt,t-(m-1)Δt]}有关。
2.1.3 小结
根据本文的交通流时间和空间的相关性分析可知,交通流的时变性很强,具有明显的趋势和连贯性,并且具有周期性、相似性以及不确定性。因此预测交通流需要结合这些特性,根据待预测路段本身和具有相关关系的其他路段的交通情 况 影 响 ,即qj[t- Δt,t],qj[t-2Δt,t- Δt],…,qj[tmΔt,t-(m-1)Δt] 的 交 通 流 变 化 趋 势 和 {q1[t-Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[tmΔt,t-(m-1)Δt],…,qj-1[t- Δt,t],…,qj-1[t-mΔt,t-(m-1)Δt],qj+1[t- Δt,t],…,qj+1[t-mΔt,t-(m-1)Δt],…,qn[t- Δt,t],…qn[t-mΔt,t-(m-1)Δt]}的非线性影响关系,考虑时间、空间节点的选择才能更加贴近真实情况。
2.2 交通流时空候选节点确定
对于城市中的行车距离而言,使用曼哈顿距离更加符合城市道路的实际情况。假设两个位置点(x1,y1)、(x2,y2),则它们之间的曼哈顿距离为:

本文以预测路段的道路交通流检测断面位置为中心画曼哈顿距离为s的边,将被包括的路段列为空间节点候选范围(即将空间范围上可能涉及的路段包括进来),如图5所示,其中每条线段代表一条路段,加粗的线段表示为被选择的路段。

其中:s为车辆行驶路程,v为车辆行驶速度。
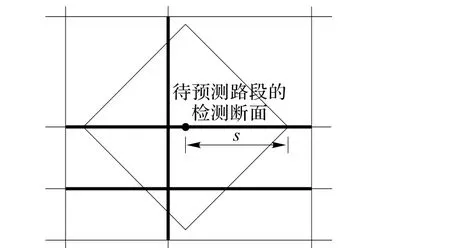
图5 空间节点候选范围Fig.5 Spatial nodecandidaterange
根据qj[t,t+Δt]与待预测路段本身历史数据和具有相关关系的其他路段的交通情况影响,即qj[t-Δt,t],qj[t-2Δt,t- Δt],…,qj[t-mΔt,t-(m-1)Δt] 和 {q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[t-mΔt,t-(m-1)Δt],…,qj-1[t- Δt,t],…,qj-1[t-mΔt,t-(m-1)Δt],qj+1[t- Δt,t],… ,qj+1[t-mΔt,t-(m-1)Δt],… ,qn[t-Δt,t],…,qn[t-mΔt,t-(m-1)Δt]},则将可能影响qj[t,t+Δt]的不同路段的不同时段交通流作为时空候选节点。由于道路为双向行驶,则将其作为不同的路段分析,将候选空间范围内的所有路段进行标注,每一个节点号表示一个道路断面。建立时空节点候选集合{q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[t-mΔt,t-(m-1)Δt],…,qj[t-Δt,t],… ,qj[t-mΔt,t-(m-1)Δt],… ,qn[t- Δt,t],… ,qn[t-mΔt,t-(m-1)Δt]},即初步选定了m∗n个候选时空节点。
2.3 基于遗传算法的交通流时空节点包裹式特征选择
全面考虑的特征数量往往较多,其中可能存在不相关的特征,特征数越多,分析特征、训练模型所需的时间就越长,模型也会越复杂,其推广能力会下降。本文先使用包裹式特征选择方法[12]对待预测路段交通流具有影响的特征进行筛选,从而达到减少特征个数,提高模型精确度,减少运行时间的目的。
以预测误差值最小为目标函数。交通流时空节点选择的过程就是从候选时空节点集合中找到一个子集使目标函数最佳。这是一个0-1组合优化问题。
因此本文选择遗传算法(Genetic Algorithm,GA)[13]进行求解。遗传算法是一种启发式搜索算法,基于基因遗传学和自然选择原理,它通过多个染色体之间的组合交叉和变异,不断迭代来逼近最优解。运用该算法该对交通流时空节点选择的基本框架如图6所示,其中Imax为最大迭代次数,采用训练样本集上误差平方和的倒数作为目标函数计算适应度:

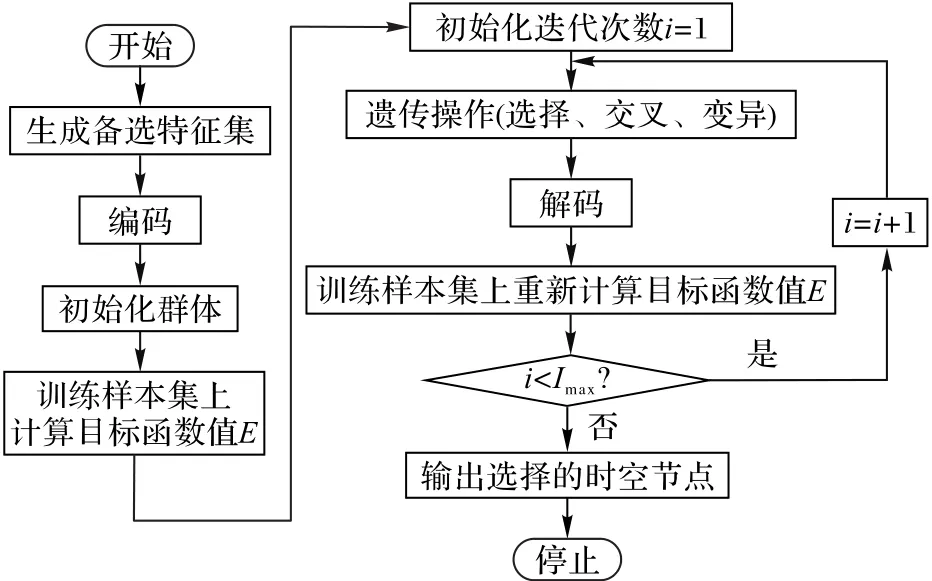
图6 遗传算法选择基本过程Fig.6 Basic processof genetic algorithmselection
同时求解该问题需要将解空间映射到编码空间,染色体的每一位对应时空候选集合{q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[t-mΔt,t-(m-1)Δt],… ,qj[t- Δt,t],…,qj[t-mΔt,t-(m-1)Δt],… ,qn[t- Δt,t],…,qn[t-mΔt,t-(m-1)Δt]}中的元素,若染色体某一位值为“1”,表示该位对应的交通流时空节点参与最终的建模;反之,则表示“0”对应的交通流时空节点不参与最终的建模(如图7所示,节点用qn,m简略表示)。采用定义的目标函数即预测误差值对群体中所有的染色体进行评价,保存预测误差值最低的染色体;采用轮盘赌选法对群体的染色体进行选择操作,按照概率进行交配和变异,更新最小误差值对应的染色体,经过不断的迭代进化,最终筛选出最具有代表性的交通流时空节点参与建模。选择出最优的染色体,即最优时空节点集合。
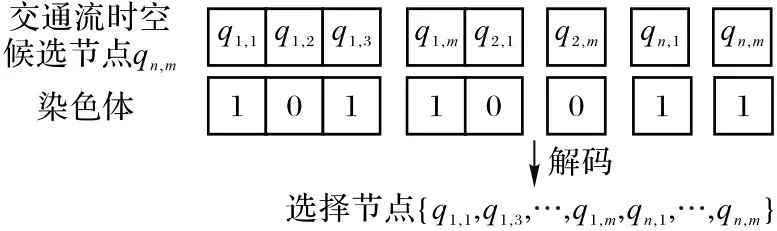
图7 编码规则Fig.7 Encoding rules
3 基于BPNN的短时交通流预测模型
3.1 反向传播神经网络介绍
BPNN是一种按误差逆传播算法训练的多层前馈网络,是目前应用最广泛的神经网络模型之一。它能学习和存储大量的输入-输出模式映射关系,而无需事前揭示描述这种映射关系的数学方程。在一定学习规则下,对提供的学习样本进行学习,通过反向传播来不断调整网络的权值和阈值,使网络的误差平方和最小。该算法实质是把样本的输入与输出问题变为非线性优化求解问题,并采用梯度下降法进行求解。
BPNN的特点对于利用具有相关关系的其他路段的时间空间节点历史数据求待预测的路段的交通量是相类似的,对于交通流的不确定性也能够体现,即探索qj[t,t+Δt]与{q1[t- Δt,t],…,q1[t-mΔt,t-(m-1)Δt],q2[t- Δt,t],…,q2[t-mΔt,t-(m-1)Δt],…,qj[t- Δt,t],…,qj[t-mΔt,t-(m-1)Δt],…,qn[t- Δt,t],…,qn[t-mΔt,t-(m-1)Δt]}之间的关系。
3.2 基于时空节点选择和深度学习的短时交通流预测模型
以误差平方和的倒数作为适应度函数,本文提出的模型即采用遗传算法对时空节点进行选择,将选择出的节点数据作为BPNN的输入。本文提出的基于时空节点选择和深度学习的短时交通流预测的流程如图8所示。
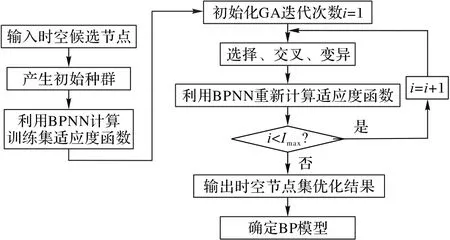
图8 交通流短时预测模型训练过程Fig.8 Training process of traffic flow short-time prediction model
主要步骤为:
1)全部的m*n个时空节点为候选,设置种群大小N,最大代数Imax,初始化代数计数i=1;初始种群产生,随机产生N个初始串结构数据,每个串结构数据即为一个个体,N个个体构成了一个种群,在训练样本上采用BPNN计算种群中个体的适应度。
2)依次进行选择、交叉、变异操作产生新种群。
3)根据新种群解码后确定的时空节点作为输入变量,以训练样本上误差平方和的倒数作为适应度函数,采用BPNN计算新种群的适应度,采用轮盘赌法确定各个体被选中的次数。
4)计数i<Imax是,则代数计数i=i+1,转2);否则转5)。
5)优化结果输出,即时空节点组合的确定,最终的BPNN城市道路短时交通流预测模型确定。
3.3 方法的理论分析与比较
在时空数据使用范围的选择上,文献[7-8]直接采用相对主观经验判断,文献[9]也仅计算与待预测路段具有上、下游关系路段的相关系数来选择时空范围。而本文在时空数据上根据车辆到达的可能性划定范围并根据遗传算法进行优化选择,对比其他方法,本文较少运用主观经验,考虑最大可能性并从数据出发,运用算法进行时空节点的选择(见表1)。
同时,在本文的基于时空节点选择和深度学习的短时交通流预测模型中说明的优势之外,从交通短时预测的一些常用的预测模型来看,神经网络在大部分交通问题上(如:交通流预测、交通流状态识别、交通事件的识别、车辆定位、交通事件的预测、交通参数的融合、交通诱导方案、紧急事件救援方案)的适用性较好,同时多数研究也偏向于使用神经网络作为交通流短时预测模型。交通流数据不同的交通特性,在BPNN强大的学习及映射能力下被充分地利用。
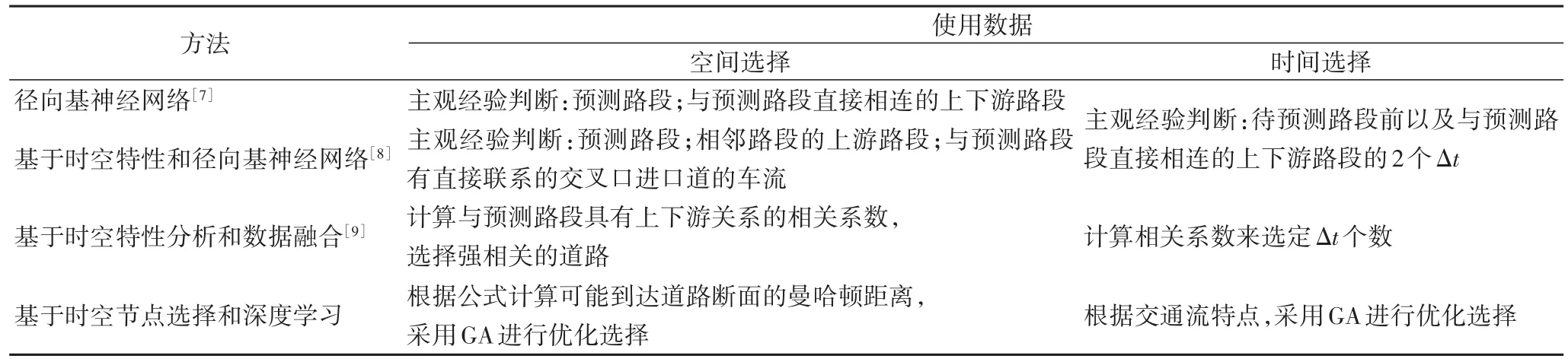
表1 使用的数据对比Tab.1 Used datacomparison
4 城市道路短时交通流预测实例及结果分析
4.1 实验对象和数据说明
本实验以福建省泉州市田安北路(津淮街与丰泽街所截路段,车流方向向北)为实验对象,数据使用2019年8月一周共5个工作日的路段交通流量。将数据集为一组{q1[t-Δt,t],…,q1[t-mΔt,t-(m-1)Δt],…,qn[t-mΔt,t-(m-1)Δt],qj[t,t+ Δt]}记为一条数据,其中qj[t,t+ Δt]即为预测的目标值,时段为每日8:00至22:00,5 min一条有168条,共有840条。分为每日一组进行K折交叉验证得出平均误差,K为5。训练样本H为672,测试样本k为168。在v=25 km/h,Δt=5的情况下s范围内的能够检测的空间节点数n为28。
4.2 评价方法和指标
在衡量方法的预测精确中通常采用一些指标,这些指标值越小就表明相应模型的预测效果越好。本文采用平均绝对误差(Mean Absolute Error,MAE)和平均绝对百分误差(Mean Absolute Percentage Error,MAPE)这2个指标来评估模型的预测精度:
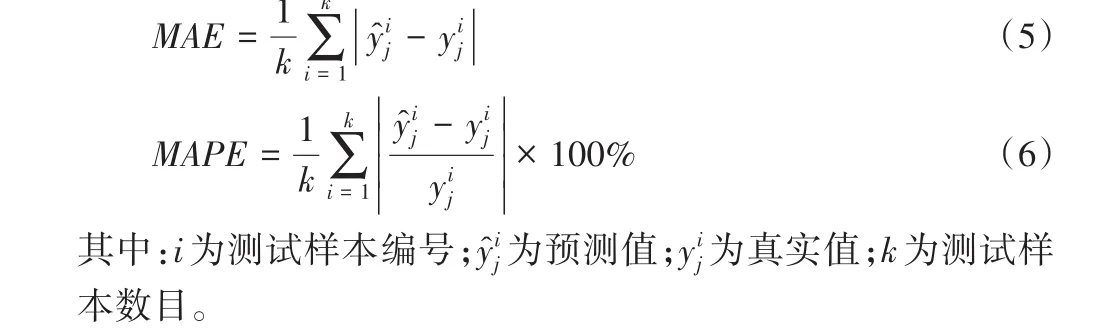
4.3 实验参数设置
实验中在用遗传算法进行时空节点选择时,其选择、交叉、变异分别采用比例选择算子、单点交叉算子、单点变异算子,种群个数为20,交叉概率为0.6,变异概率为0.05,最大进化迭代数为200。
BPNN在进行交通流预测时,为四层神经网络,其中:输入层节点个数为筛选的时空节点个数;隐层为2层,第一层节点数为39,第二层为8,隐含层函数tansig;输出层函数purelin,的学习率设置为0.01,goal为0.1,最大迭代次数1000次。
其外,对比算法的支持向量机(SVM)核函数选择为RBF(Radial Basis Function),梯 度 提 升 树(Gradient Boosting Decision Tree,GBDT)深度为3,最大迭代次数为100,最小叶子节点数1,损失函数为deviance。
4.4 短时交通流预测模型实验结果
4.4.1 时间节点范围和预测时间间隔对实验结果的影响
将时间节点作为变量,选择最接近预测时段的前m个Δt的时间段(m=2,3,4,5,6),模型的预测结果如表2所示。可以看出,在取m=4的时候模型预测效果较优,因此取m=4。
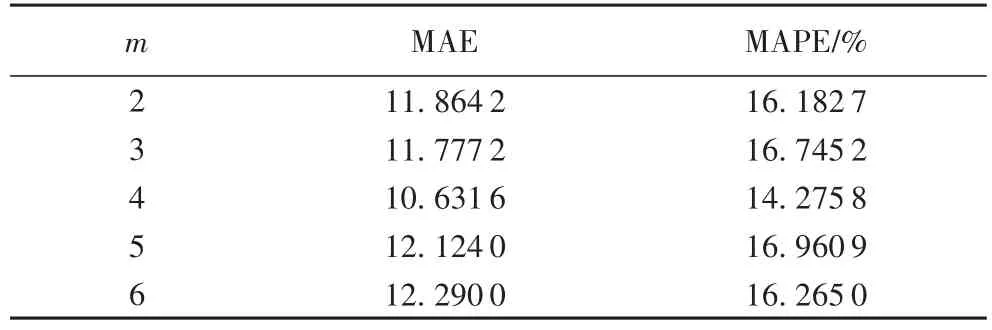
表2 使用不同时间节点范围的预测结果Tab.2 Prediction results usingdifferent temporal noderanges
为了探究交通流预测时间对模型的影响,选择了不同的时间间隔(Δt=5,10,15,20)进行实验,模型的预测结果如表3所示。可以看出在Δt的取值不断增大时MAE也随之增大,即预测值与真实值之差的绝对值在不断拉大,MAPE有下降趋势,以MAE为重,故取Δt=5。
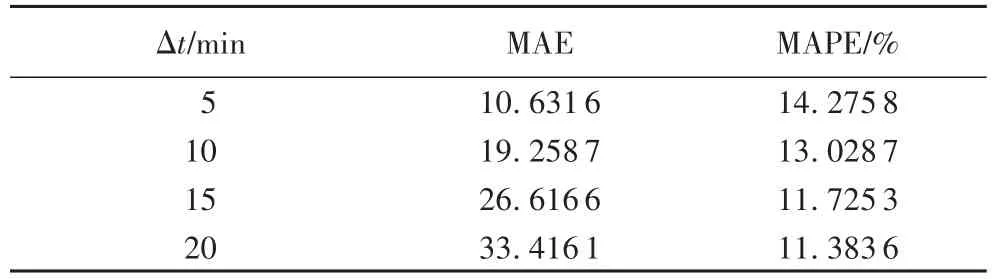
表3 短期交通流预测时间对实验结果的影响Tab.3 Influenceof short-term traffic flow prediction timeon experimental results
在确定最优短期交通流预测时间Δt=5和时间节点范围m=4后,本文提出的基于时空节点选择和深度学习的城市道路短时交通流预测的MAE为10.631 6,MAPE为14.275 8%,筛选出的时空节点个数平均为49。
4.4.2 对比方法的实验结果
本文设置了多个对比实验来对比不同情况及模型的精度:1)为不考虑其他路段可能的影响,仅使用了与待预测路段相邻空间的交通流数据,即空间节点为直接连接的上下游路段;2)使用SVM模型;3)使用GBDT模型。
同时,本文使用安徽省宣城市2016年12月15日8:00至22:00交叉口车道交通量开放数据集[11]对本文模型进行验证。以HK-95最后20条做测试集,得MAE和MAPE分别为17.1790和12.5713%。
综上所述,根据本文所设置的对比实验,得出的最终实验结果如表4所示。
4.5 实验结果分析
1)根据表2,可以发现当选用4个Δt时间段作为时间节点范围时与选用其他的预测效果略优,本文选用的4个Δt作时间节点范围能够提升模型的精度。
2)从表3中可以看出在短期交通流预测时间间隔不断加大的情况下,MAE也随之增大差距明显。
3)根据表4可以发现,仅使用与待预测路段相邻空间的交通流数据的预测效果比考虑所有可能性的空间范围数据的预测效果在MAE和MAPE两个值上分别高出了0.257 3和0.999 1个百分点,预测效果较差。说明基于时空节点选择和深度学习方法对路网组成及交通流特性分析较好,数据利用较全面。
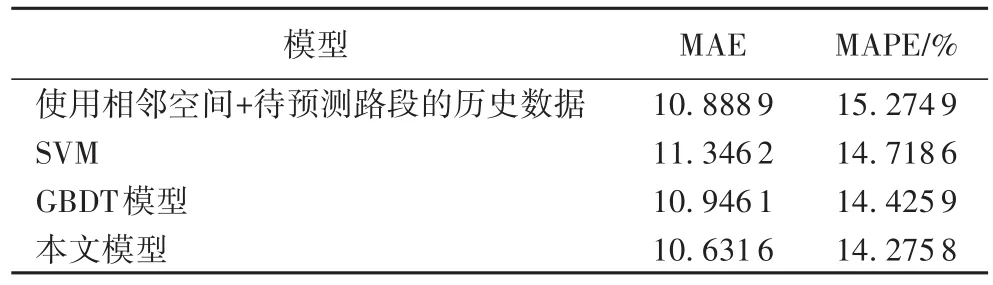
表4 几种模型的实验结果对比Tab.4 Comparison of experimental results of several models
从以上分析可以得出,本文提出的基于时空节点选择和深度学习的城市道路短时交通流预测具有最佳的预测性能,对比其他方法预测准确率都有不同的提升,表明本文方法是一种有效的短时交通流预测方法。
5 结语
本文在理论和数据表现上对交通流特性进行分析,了解了交通流的周期性、相似性、不确定性等时空特性,并分析了与路段未来交通流有影响关系的对象。使用遗传算法进行最优时空节点集合中元素的选择,最后通过BPNN模型的预测结果得出最终的交通流预测值。在使用数据上更加全面地考虑了交通流特性和路网的复杂性,实验证明在与交通流数据的选择以及与其他模型的对比上,本文提出的基于时空节点选择和深度学习的城市道路短时交通流预测模型对城市道路的短时交通流预测在MAE、MAPE上都具有最优的预测精度。
同时,对交通流的复杂性还可以更深入地研究,且本实验的模型中BPNN的隐层层数和节点数可以进行更多次的实验寻找最优结构,以进一步降低模型的预测误差。
