低重频雷达回波准最大似然速度估计
2020-06-06朱天林黄亚楠傅茂忠邓振淼
金 胜, 朱天林, 黄亚楠, 傅茂忠, 邓振淼
(1.北京跟踪与通信研究所, 北京 100094; 2.厦门大学信息科学与技术学院, 福建厦门 361005)
0 引言
脉冲雷达是目前广泛使用的雷达体制,而其固有的速度模糊问题一直没有很好的解决方案[1-2]。在雷达信号处理领域,火箭、导弹等高速目标的快速捕获和跟踪一直是研究热点,近年来具有高速高机动特性的临近空间飞行器使脉冲雷达面临更加艰巨的挑战[3-10]。跟踪这类高速目标时的速度模糊现象会产生错误信息并严重影响接下来的目标检测、成像和跟踪等算法的性能[11]。为此,本文对脉冲雷达的速度解模糊问题进行深入研究。
目前已经有多种方法可以实现解多普勒模糊。廉志玲等提出利用发射多重频脉冲信号的方法来解速度模糊,但是这类方法计算量较大且需要改造雷达相应硬件结构,不利于工程实现[12]。孟飞等研究使用距离跟踪数据的微分值来解速度模糊。该方法通常需要2 s以上的观测时间才能得到较为平稳的观测值。另外由于距离跟踪数据存在测量误差,因此该方法的误差较大[13],滤波器输出结果的速度估计值精度通常在十几米每秒左右。李亚超等对宽带信号采用相邻相关法进行速度估计,可以得到目标的无模糊速度,但是该算法不适用于窄带信号[14]。苏军海等基于Radon变换,通过构造代价函数的方式对速度模糊折叠数进行搜索[15]。该方法由于使用了基于图像的处理方法,因此需要在高信噪比条件下使用大量脉冲数进行估计。综上所述,目前已有的解模糊算法在脉冲雷达上的工程实现受到了诸多限制,且性能还不够理想。
本文分析了脉冲雷达的目标回波信号,在不改变现有脉冲雷达系统的基础上,根据回波信号的似然函数的分布特性提出了一种速度粗估计方法。该方法基于相参脉冲回波信号的距离-速度模糊函数的盲速旁瓣在速度真值处达到最大值,在真值两侧的旁瓣对称逐渐减小的性质,通过合适的算法设计搜索盲速旁瓣的峰值位置,该位置对应的速度即为目标速度估计值。本方法利用通常认为是不利且尽量避免的盲速旁瓣进行速度粗估计,只需要利用少数脉冲即可以得到目标速度的估计值,在脉冲重复频率较低的脉冲雷达里具有较好的应用前景。
1 数学模型
线性调频脉冲是现代雷达常用的一种发射信号形式,其基带信号的复数形式为

(1)

雷达信号在空间内传播,被目标反射后到达雷达接收端。因此,雷达接收到的目标回波可以写为
(2)
式中,r(t)为在t时刻雷达与目标散射点之间的径向距离,fc为载波中心频率,c为光速,z=A· exp(jθ)为未知的目标复散射系数,u(t)为复加性高斯白噪声。由于本文讨论的是低重频雷达,雷达信号的脉冲宽度远小于脉冲重复间隔(PRI),因此可以采用走停模型描述回波信号,即认为目标相对于雷达的运动在脉内可以忽略不计,而仅考虑脉间目标相对于雷达运动所产生的时延。因此,可以将回波信号中的瞬时往返时延2r(t)/c近似替换为脉间的往返时延τm。在一个相参处理间隔(CPI)内,假设目标作匀速直线运动,那么第m个脉冲的往返时延可以表示为
(3)
式中,tm=mTr为慢时间,Tr为脉冲重复间隔PRI的时间宽度,r0和v0分别为t=0时刻目标相对于雷达的径向距离和速度。当目标沿着径向远离雷达时v0为正,靠近雷达时v0为负。将式(2)中的2r(t)/c替换为τm,得到走停模型下的基带回波信号:

(4)
对基带回波的时域信号作傅里叶变换,可以推出回波信号的频域表达式:

(5)

对基带回波信号进行匹配滤波就可以实现脉冲压缩,并且匹配滤波器的传输函数是发射信号的脉冲包络的共轭。因此,在频域上对基带回波信号进行匹配滤波,实现如下:
YPC(f)=Srb(f)S*(f)
(6)
将式(5)代入式(6)中,得到
(7)
Yk,m=zexp(-j2π(fc+kΔf)τm)+Uk,m
(8)
式中,k=-K,…0,…K为频域上信号带宽内的采样点,Δf=γΔt为频域采样步长,每个脉冲的带宽B0=(2K+1)Δf,m=-M,…0,…,M为一个CPI内的积累脉冲序号,积累脉冲数Np=2M+1。经过匹配滤波器(线性滤波器)后的噪声项Uk,m仍然可以近似为复加性高斯白噪声,设它的方差为σ2。为了方便下文仿真分析,这里先定义输入信噪比为脉冲压缩后的频域数字信号的信噪比,即
(9)
利用多个相参脉冲回波可以构造目标的距离-速度模糊函数,从中可以得到目标的运动参数信息。接下来首先给出距离-速度二维模糊函数的构造方法,随后分析速度维模糊分析的特性,由此推导出一种快速速度粗估计方法。
2 速度维似然函数分析
由式(8)可知,样本Yk,m服从均值为z· exp(-j2π(fc+kΔf)τm)、方差为σ2的复高斯分布,其概率密度分布为
p(Yk,m;z,r,v)=
(10)
由于不同样本间满足相互独立的条件,因此对所有样本求取似然函数,得到

(11)
进一步求得对数似然函数
lnL(z,r,v)=-(2K+1)(2M+1)ln(πσ2)-
(12)
求解上式的最大值,得到目标运动参数的最大似然估计:

exp(j2π(fc+kΔf)τm(r,v))|
(13)
因此,具体在求取目标运动参数的最大似然估计时,需要在可能的参数空间内对目标的径向距离和速度进行联合搜索。理论上,在满足样本数足够多且搜索步长足够小的条件下,通过最大似然估计就能达到参数估计的克拉美-罗限,即实现理论上的最优估计。
为了分析速度模糊现象并引出本文算法,这里另外定义r,v的似然函数:
(14)
将Yk,m中的信号复散射系数z置为1,噪声项Uk,m置为0后代入上式,得到
H(r,v)=
(15)
注意到r0,v0只是决定了H(r,v)在距离维和速度维上的中心位置。为了分析方便,将r0,v0置为0,将H(r,v)的中心位置设在原点,最终得到了只与r,v有关的似然函数表达式:
(16)
取r≡0代入上式,得到速度维似然函数:

(17)
上式中的函数G定义为

(18)
函数G在绝对值符号内是一个周期性的sinc函数,其周期大小为2π且在γ=2nπ(n为任意整数)处周期性地出现峰值。
为了直观地观察展示速度维似然函数分布,这里给出一组典型的雷达参数:载波中心频率fc=3 GHz、带宽B=5 MHz、采样频率fs=10 MHz、脉宽T=25 μs、脉冲重复频率fr=300 Hz以及积累脉冲数Np=33。图1 (a)为速度真值所在的无模糊范围内的速度维似然函数分布,它接近sinc包络。而从大范围进行观察时,速度维似然函数会周期性地出现峰值(除速度真值对应的主峰之外的峰称为盲速旁瓣),如图1 (b)所示,各峰值之间的间隔即为最大无模糊周期,并且各个峰值形成了巨大的外包络。从整体上看,构成外包络的局部小峰值随着速度与真值的偏移呈现衰减趋势。

(b) 整体
由于式(17)的表达式过于复杂,不便于进行定量分析,因此需要继续对式(17)进行化简分析。假设
(19)

(20)
按照前面对函数G的讨论,可以得到函数W(v)的周期为
(21)
可以看到,式(21)的具体值与m有关。而函数U(v)的周期为

(22)
假设v为vu的整数倍,即v=Nvu,N为整数,此时有

exp(2π×N)=1
(23)
将式(23)代入式(17)可以得到外包络分布函数:

(24)

图2 外包络函数、似然函数和最小周期函数G对比

从速度维模糊函数可以看出,其外包络在速度真值两边随着速度值与真值的差单调减小。由此,可以根据这个特性进行目标速度的估计。
3 准最大似然速度粗估计
按照前面对速度维似然函数分布的分析,一种比较简单、直接的解速度模糊思路是:以获得的目标速度估计值作为初始值,设定vs作为步长,大范围地求取速度维似然函数外包络上的各峰值,最后搜索最高峰所在的位置。但是在图1 (b)的情形下,在真值附近范围的外包络过于平缓,并不存在一个突出的峰值,容易受到噪声影响,因此最终搜索到的不一定是速度真值。


(25)

(26)



(27)
(28)

(29)

4 仿真及分析
由于前面给出的解速度模糊算法需要对给定雷达参数的速度维似然函数进行具体分析,为了方便讨论,这里使用表1中的B组雷达参数下进行仿真实验与分析。同时,目标运动参数设为r0=100 km,v0=2 000 m/s。假设距离跟踪数据的微分值与目标真实速度相差较大,为vc=2 100 m/s。
无模糊范围间隔数n是本算法的关键参数。但是,目前并没有给出关于间隔数n的合适选值,这里将n设为整数10,20…50,进行5组仿真实验。为了研究噪声和间隔数n对算法精度的影响,在各组仿真中设置输入信噪比-10~5 dB,步长1 dB,每个信噪比下进行1 000次蒙特卡罗仿真。最终得到在给定的具体雷达参数下,本节所提出算法的速度估计值均方根误差与输入信噪比之间的关系如图3所示。如果算法得到的速度估计值落在以速度真值v0为中心的无模糊范围内,即认为正确解模糊;反之,则得到错误的解模糊结果。解模糊的正确率也是评判算法的标准之一。同样地,设置输入信噪比-10~5 dB,步长1 dB,每个信噪比下进行1 000次蒙特卡罗仿真。可以得到算法的解模糊正确率与输入信噪比之间的关系如图4所示。
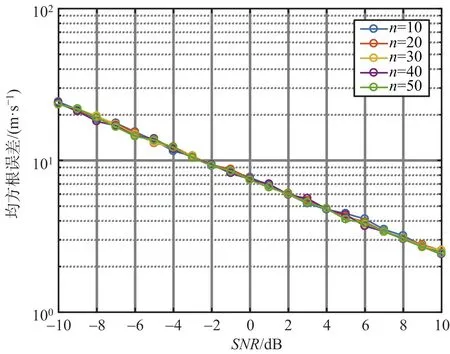
图3 速度估计值均方根误差与间隔数及输入信噪比之间的关系

图4 解模糊正确率与间隔数及输入信噪比之间的关系

n∈Z+
(30)

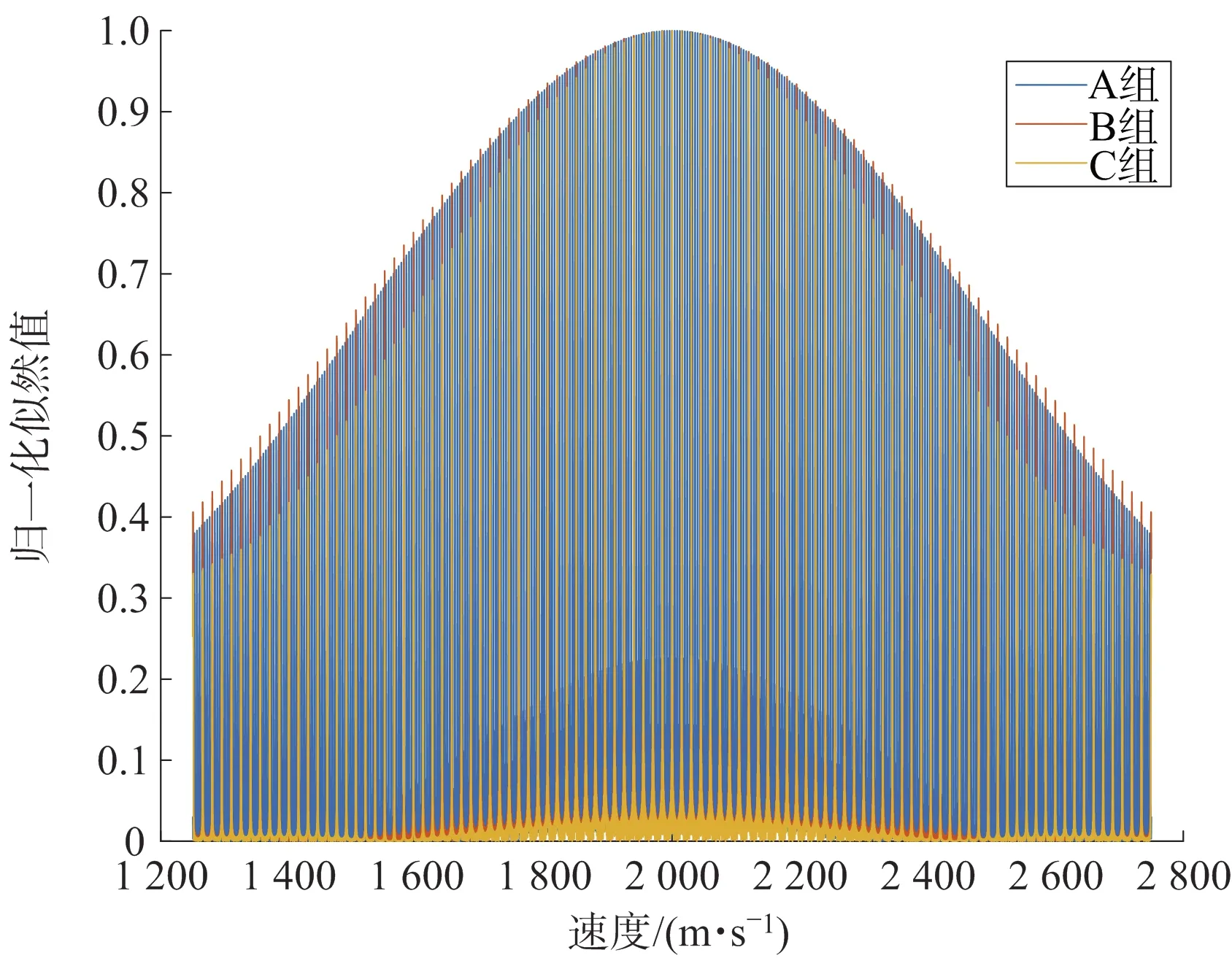
本文提出的算法依赖于速度维似然函数分布的特性,因此本节还将讨论雷达参数对速度维似然函数分布的特性的影响。这里选取表1中3组雷达仿真参数进行仿真分析。如图5所示,A组参数与B组参数的外包络主瓣宽度接近,C组参数外包络主瓣宽度较小。另外,可以看到B组参数与C组参数的无模糊周期一样,而A组参数峰值更为密集。

表1 雷达仿真参数

(a) 局部
(b) 整体

图6 A组、B组和C组雷达仿真参数下均方根误差对比


图7 A组、B组和C组雷达仿真参数下解模糊正确率对比
5 结束语
