彩色摄像机颜色分辨力测量
2020-06-05徐记伟方海棠邢冀川
徐记伟,杜 仙,方海棠,邢冀川
彩色摄像机颜色分辨力测量
徐记伟1,杜 仙2,方海棠3,邢冀川1
(1. 北京理工大学 光电学院,北京 100081;2. 国网宜昌供电公司信息通信分公司,湖北 宜昌 443000;3. 塔里木油田公司信息与通讯技术中心,新疆 库尔勒 841000)
为实现对彩色摄像机颜色分辨力测试,设计了通过双离散颜色源、反射式准直光学系统和四杆靶靶标模块组成的测试装置。双离散颜色源分别产生经过标定的前景和背景颜色光束,经过准直光学系统,最终合成四杆靶测试靶标图像。该系统在测量过程分别获取各频率下从靶标图像中提取的目标靶标并对其进行色差计算,通过图像算法对测试靶标进行判断和识别,获得彩色摄像机的最小可分辨色差(minimum resolvabledifference,MRED)和最小可探测色差(minimum detectabledifference,MDED),实现对彩色摄像机颜色分辨力的客观检测。
彩色摄像机;颜色分辨力;四杆靶测试靶标
0 引言
在视觉识别、艺术再现和军事目标探测领域,彩色摄像机相比于单色成像系统,能够从空间场景中获取更丰富的频率信息。然而彩色摄像机也面临图像颜色失真、不均匀性等问题,严重降低了彩色摄像机的空间分辨力。到目前为止,现有对成像传感器分辨力的研究大部分集中在“黑白”问题,只有很少部分涉及到颜色分辨力的测量[1],为了获得彩色摄像机对两种颜色差异的分辨能力,因此需要对彩色摄像机颜色分辨力进行精确地测量。
典型的颜色精度测试是通过颜色测试卡来进行颜色测试,然而这种方法工作量大,而且无法测试不同空间频率的色差。文献[2]和文献[3]中使用两路能产生特定颜色共轭像的光源及平行光管组成的颜色分辨力测量系统都需要由人来对彩色摄像机颜色分辨力进行主观判断。本文提出了通过标定的颜色光源产生双路控制四杆靶标图像,并结合图像算法对靶标图像中的目标进行探测和识别的颜色分辨力测量系统将会更加客观、有效地实现颜色精度和分辨力的测量。
1 彩色摄像机颜色分辨力测试系统
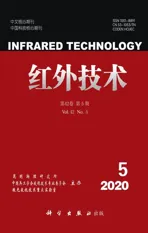
本装置由一个双离散的颜色光源和反射式目标靶组成的单个光学系统,产生双路颜色可调的单色光照射测试靶标,通过测试靶标来填充被测彩色图像传感器,由此对彩色摄像机的颜色分辨力进行测试。其中每一个颜色源都处于闭环控制状态,整个系统的输出被精确地校准。实验装置原理图如图1所示。
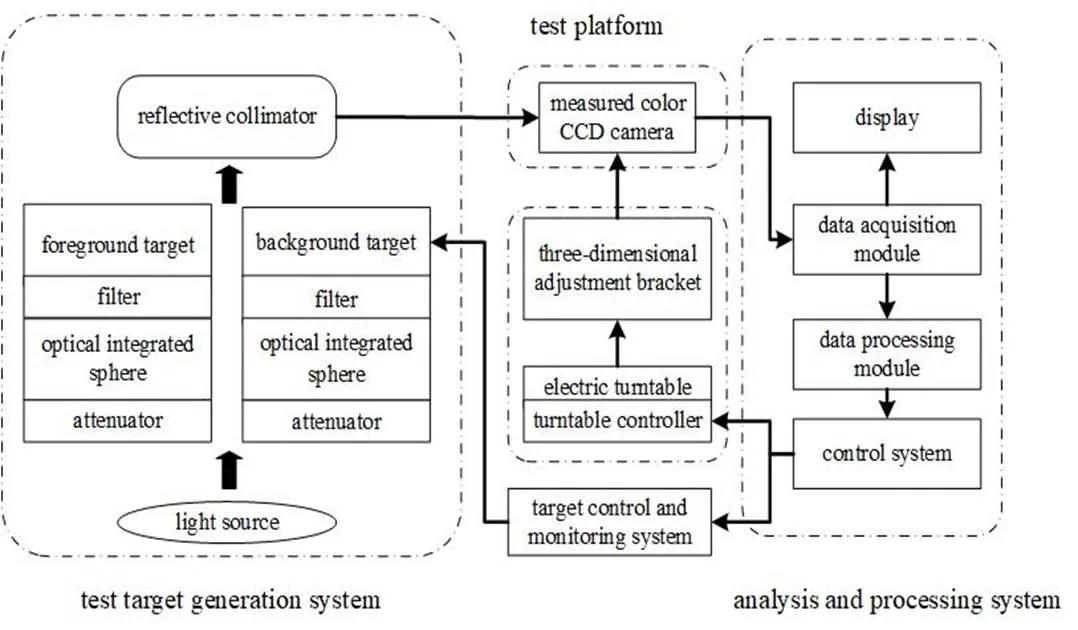
图1 彩色摄像机颜色分辨力实验装置原理图
颜色光源是通过两组双积分球[4],来产生颜色可调的双路颜色光。双积分球装置主要由主积分球、次积分球和滤光片组等组成。主积分球和次积分球主要是为了在滤光片上得到均匀光和消除滤光片所引起光源的不均匀性;滤光片通过3个可独立运动的滤光片在次积分球内产生任意的颜色光。为了对输出的颜色光进行精确地控制,每一个双积分球颜色源上都有两个光亮度传感器和光谱传感器形成闭环控制系统,分别对光源的亮度和光谱特性进行精确控制。双积分球光源结构如图2所示。
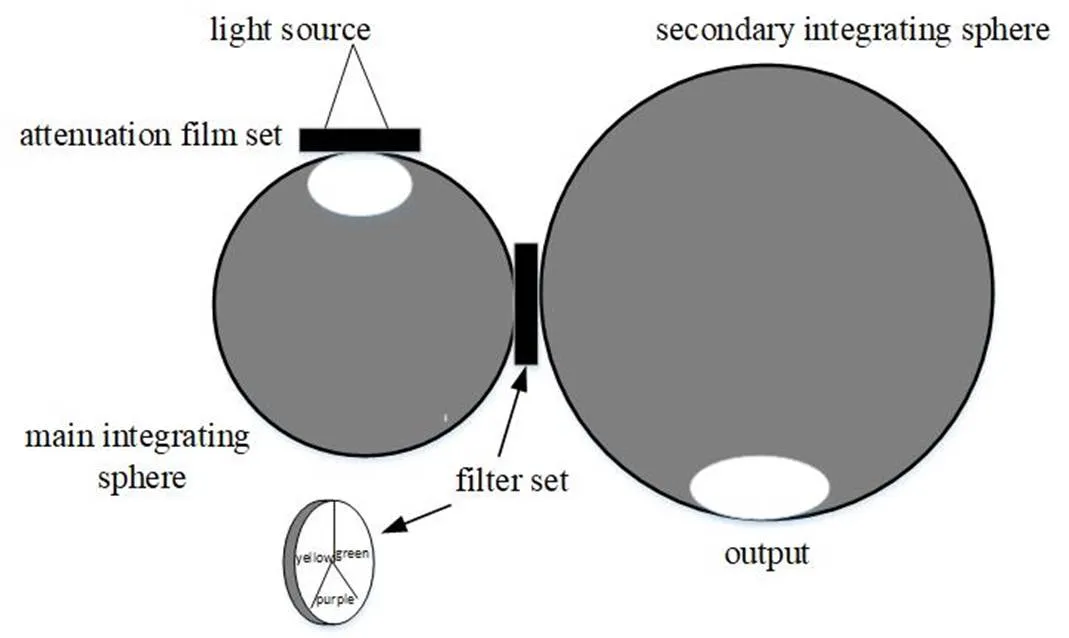
图2 双积分球颜色源系统结构
测试靶标是进行彩色摄像机颜色分辨力测试的核心部件,双路颜色光源分别照射测试靶标,通过装置中反射式光学系统将靶标图像投射在被测彩色图像传感器上。为了实现双路颜色测试图像,测试靶标是成对设计的,分为前景靶标和背景靶标。测试靶标合成如图3所示。
图3 测试靶标合成图
为了提高颜色光的保真度,系统采用了反射式光学系统[5]。传统的反射型准直器可以有一个折返镜和一个离轴抛物面组成,但是本系统要求有两路颜色靶标图样合成一路测试靶标图像,因此在光路中加入了一个分光棱镜用于在光谱和空间上组合前景通道和背景通道。光学系统原理图如图4所示。
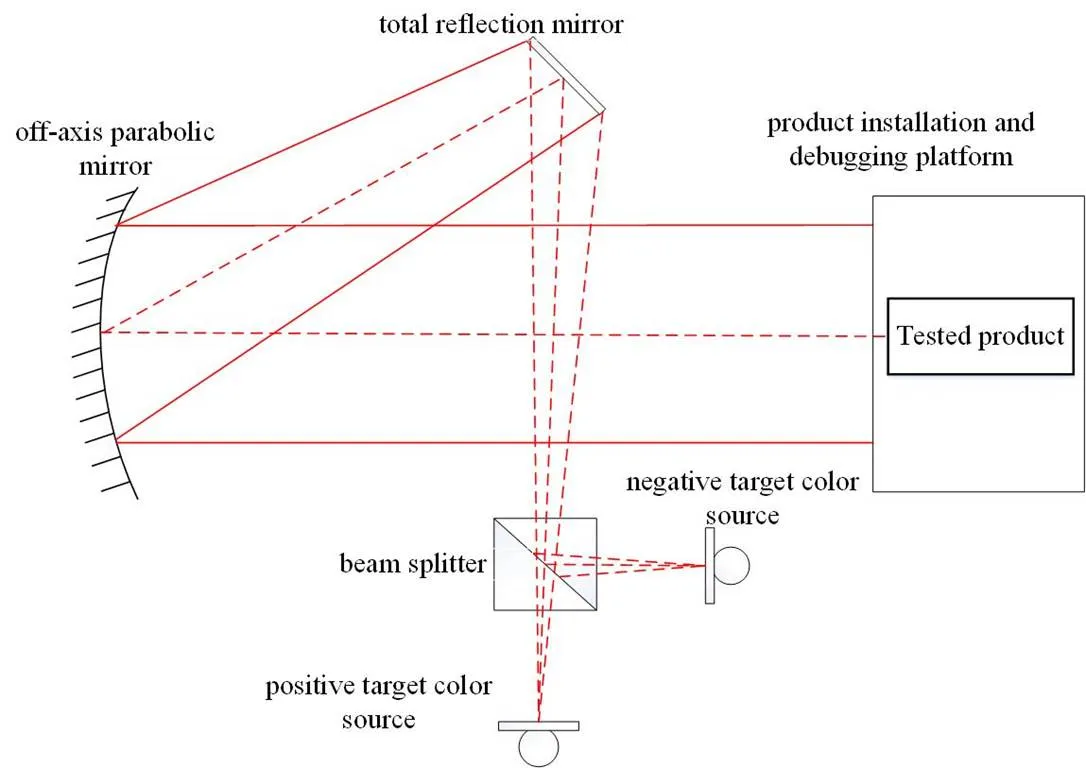
图4 光学系统原理图
2 彩色图像的特征提取与色差计算
2.1 目标特征提取
通过测试靶标图像客观地测试彩色摄像机颜色分辨力的过程中,需要对测试靶标图像进行预处理。在人主观测量彩色摄像机的颜色分辨力时,由于人眼观察图像具有一定的积分效应[6],一定程度上消除了部分随机噪声,因此在预处理时不进行过多的图像滤除噪声和改善图像信噪比。仅仅对彩色摄像机采集的靶板图像在0.1s内进行帧平均处理去除部分随机噪声,同时避免了图像条纹特征的失真[7]。
要从图像中提取颜色条纹特征首先要确定四杆靶的位置,选取颜色差异较大的靶标图像,通过自适应边缘检测和图像分割算法分别对测试靶标的感兴趣区域和靶杆位置区域进行处理。由于在测量过程中靶板相对于摄像机处于静止状态,将此区域作为一个定值。测试靶标图像处理流程图,如图5所示。
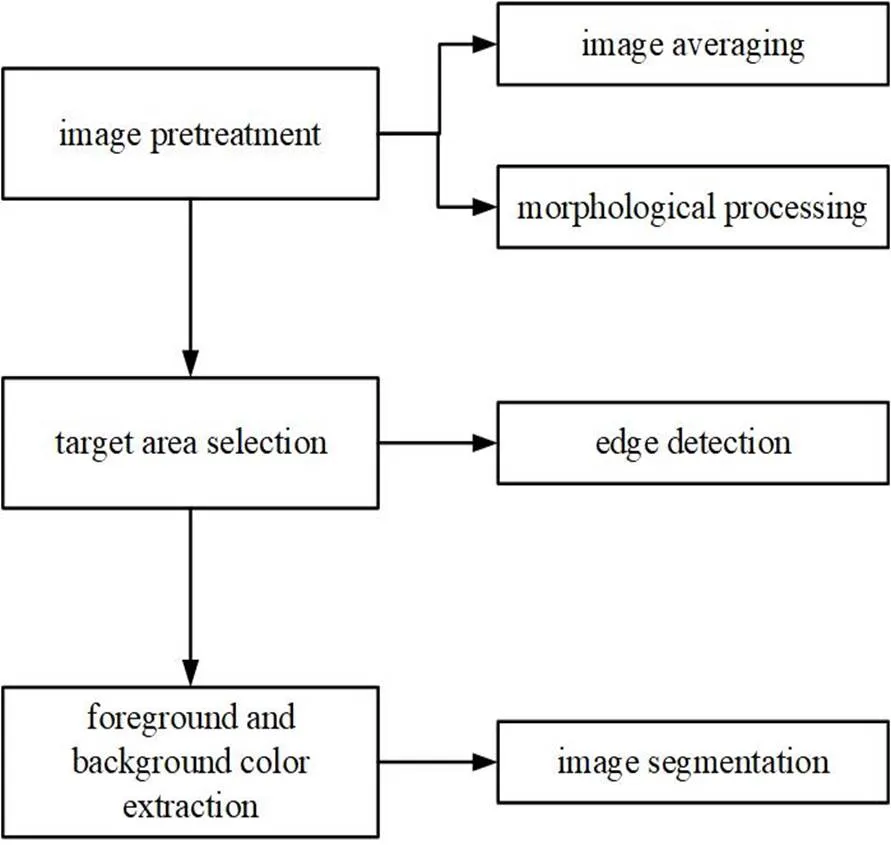
图5 测试靶标图像处理流程图
2.2 图像色差的计算
图像色差进行计算是在三维CIE L*a*b*均匀色度空间中进行的。CIELAB均匀颜色空间以等距性好、色差分辨力高[2]以及更加逼近人类的视觉感知,已经作为国际通用的测色标准。如图6所示,L*a*b*色度空间立体图。
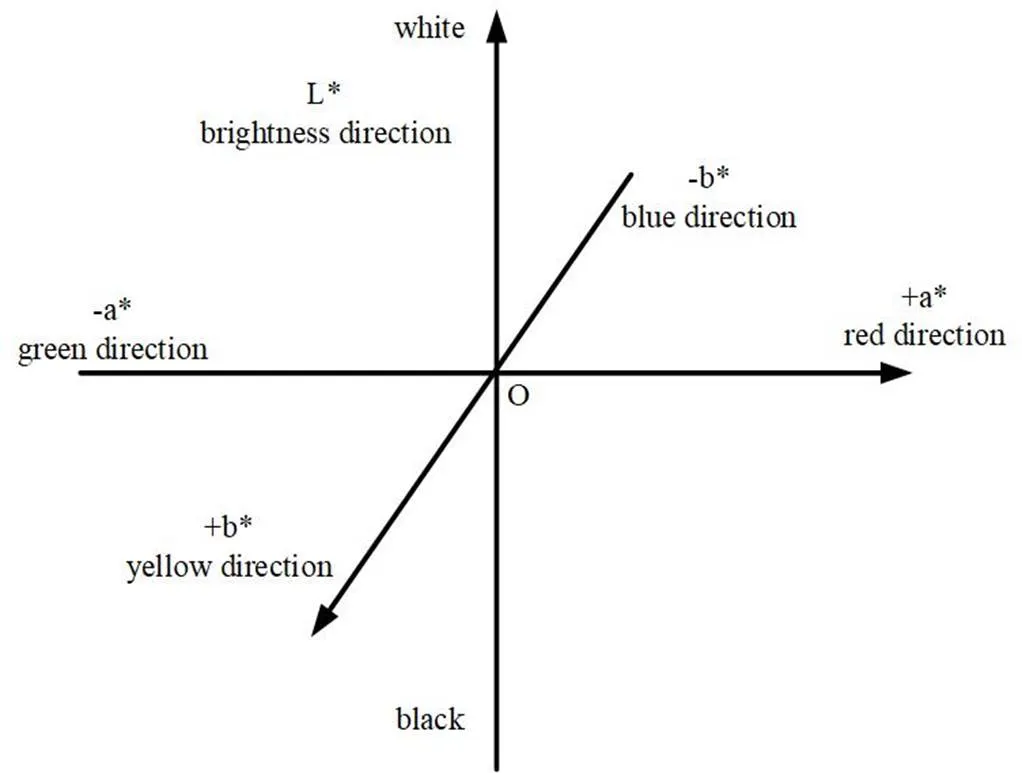
图6 L*a*b*色度空间立体图,L*表示颜色的明度,a*正值表示偏红,负值表示偏绿;b*正值表示偏黄,负值表示偏蓝
2.2.1 颜色空间的转换
假设彩色摄像机的颜色空间为sRGB[8],而sRGB和CIELAB颜色空间是不能直接转化的,需要先从sRGB颜色空间转化为CIEXYZ颜色空间,在经过CIEXYZ颜色空间变换到CIELAB颜色空间,转化程序如图7[8]所示。由sRGB转化为CIELAB可以通过一个3×3的矩阵转换来实现[9]:

由CIEXYZ转化为CIELAB的转化公式[9]如下:
明度:
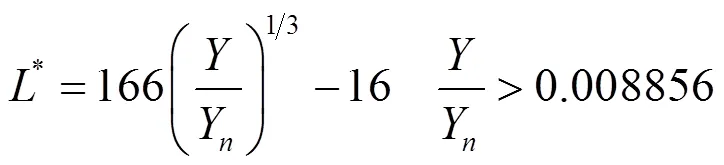
色度:
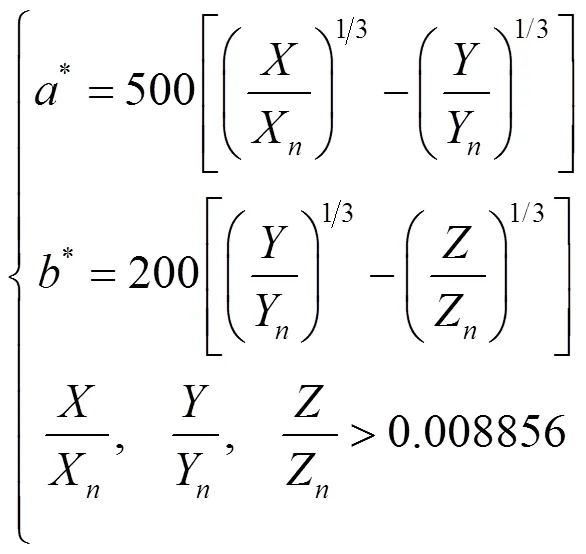
式中:X、Y、Z为照明光源的三刺激值所对应标准照明体的三刺激值。
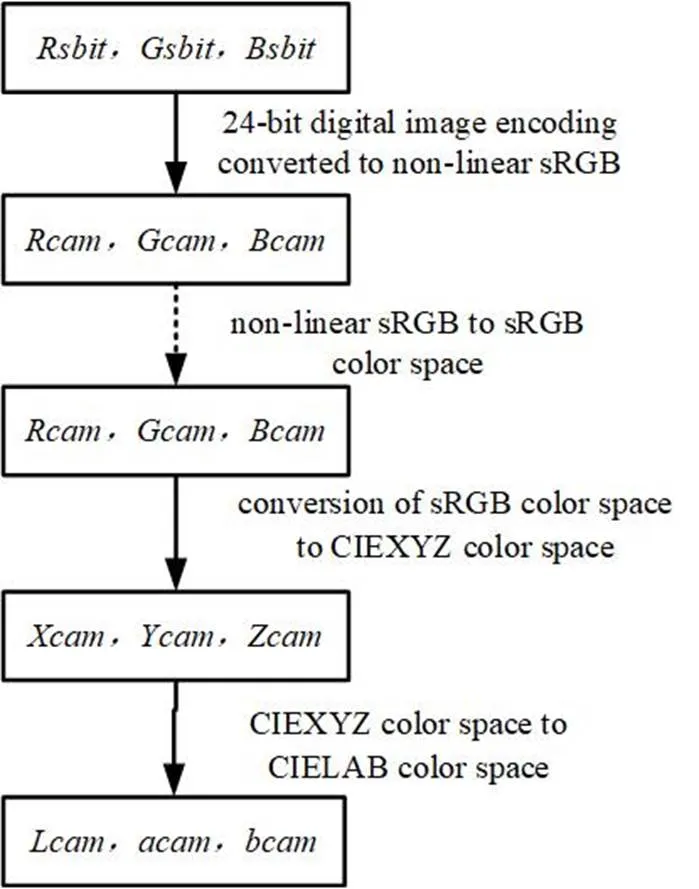
图7 颜色空间转化程序处理流程图
2.2.2 图像色差计算
彩色摄像机采集的测试靶标图像采用的是双色四杆靶图像,可以把前景色和背景色作为感兴趣区域分开处理。在CIELAB颜色空间中,*、*、*三个分量对总体平均色差的贡献是相互独立的,因此可以通过对前景靶标区域和背景靶标区域分别求3个分量的算术平均值[10]:

对彩色摄像机颜色分辨力进行测量就需要色差阈值作为对测试图像判定的依据,当所测量的色差小于该阈值就无法分辨,反之可以分辨;在彩色电视系统中两种颜色恰巧刚好不能区分的色差值[12](just noticeable color difference, JNCD)为5NBS(Dalton, 1987)[13],并且该值已经广泛应用到彩色摄像机颜色检测和校正中[14]。因此取该值作为设备的色差阈值。测试图像的可分辨区域的划分可通过式(6)来描述:
D≥JNCD (6)
3 彩色摄像机色差分辨力测试
本实验通过最小可探测色差MRED、最小可分辨色差MDED两个指标来反映彩色摄像机对颜色的分辨能力。MDED用于量化测试者可探测两种颜色测试图像的最小色差;MRED用于量化测试者可识别两种颜色测试图像的最小色差[3]。MDED和MRED分别可以通过识别四杆靶测试图样中至少一个色杆目标(当识别的像素数占一个靶杆目标的75%时,确认该目标被识别出来时的色差为最小可探测色差)和3个色杆目标(恰好识别每只靶杆图案像素点的75%且识别四杆靶图像中的3个靶杆目标时)所对应的前景色和背景色之间的色差来表示,如图8所示。
在测试过程中先通过光源控制器调节两个光源的参数,使其具有相同的波长、带宽和强度。此时完全不能分辨前景靶标和背景靶标。保持背景光源颜色不变的条件下,调节前景光源的波长(测试中按照lnm的步长进行测试,前景和背景色差变化如图9所示),将会逐渐增大前景和背景颜色的差异。
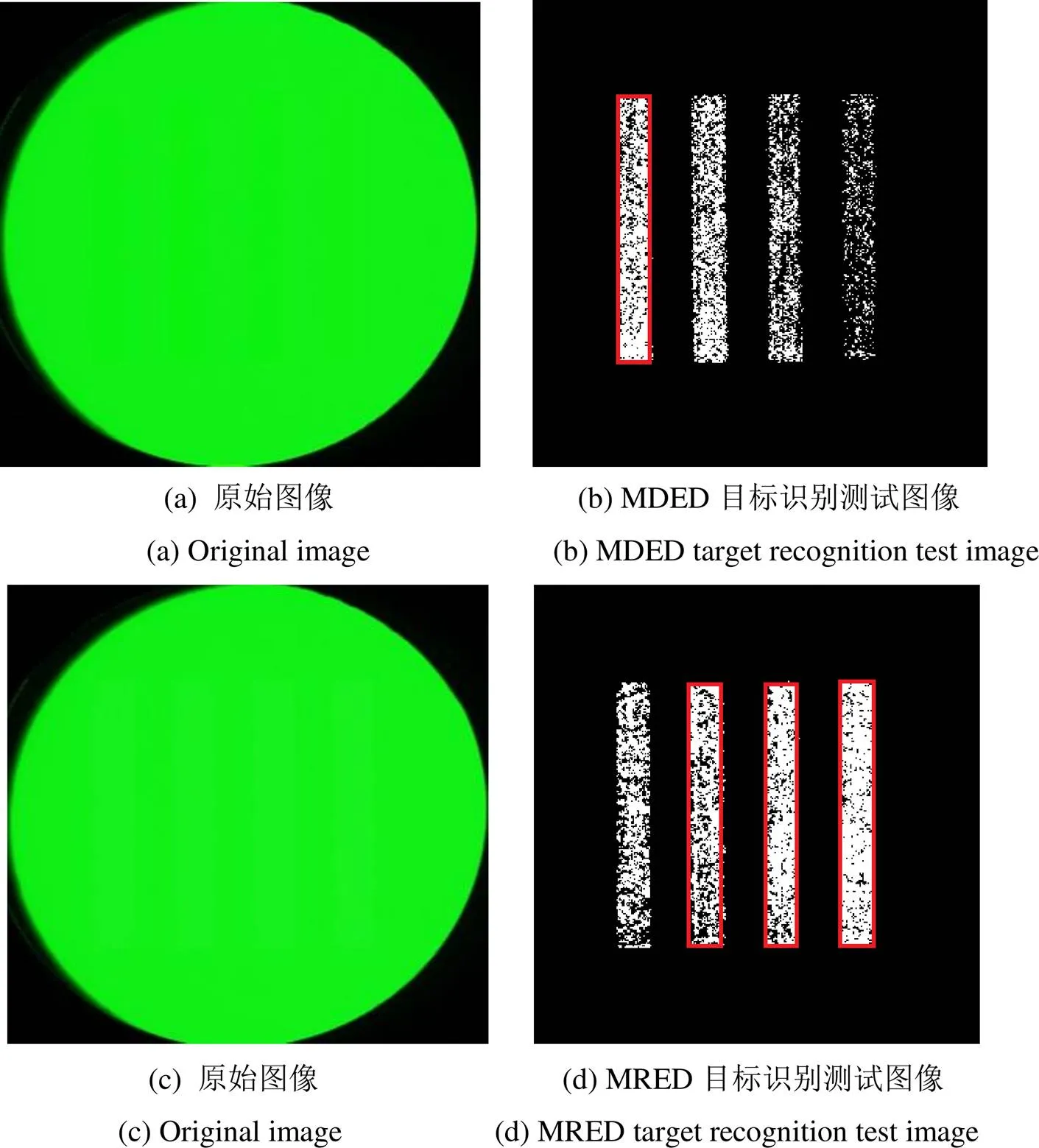
图8 彩色摄像机的最小可探测色差测试图像和最小可分辨色差测试图像
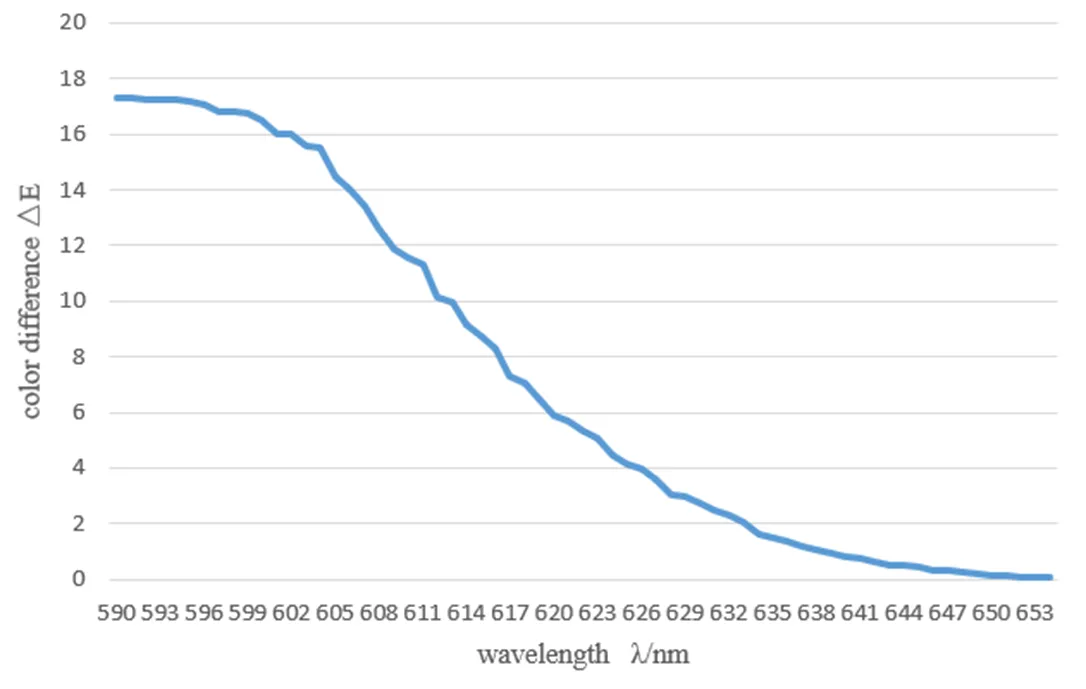
图9 颜色分辨力测试装置从590nm~653nm的色差变化曲线
在此过程中,用被测彩色摄像机连续采集50幅图像,对获取的目标图像数据预处理(图像平均运算)后,作为对彩色摄像颜色分辨力进行测试的颜色样本。通过图5中所示中靶板前景和背景目标提取算法,对获取四杆靶图像中的区域目标按照图7所示的颜色空间转换算法变换到Lab颜色空间,在经过公式(4)和公式(5)计算前景目标和背景目标的色差。MRED和MDED可通过公式(6)计算能够探测到的靶杆像素个数并结合JNCD判别标准对测试靶杆进行分辨。重复上面的测试步骤,只需要更换分辨力靶板的便可以计算出不同分辨力下的最小可分辨色差和最小可探测色差。测试结果如图10所示。
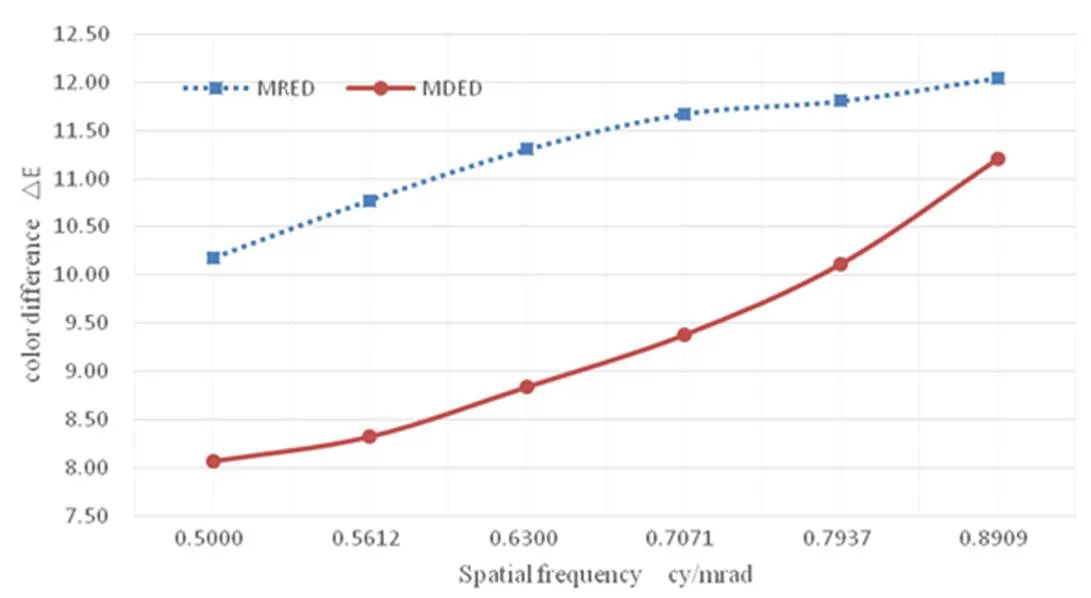
图10 彩色摄像机颜色分辨力测试曲线
由图10可知,随着空间频率越大,最小可探测和最小可分辨色差也逐渐增加,这一规律符合客观事实。但是其增加的幅度不大,在3NBS左右,该值小于摄像机可以识别的最小色差5NBS,可以忽略不计。因此,在某一种颜色波段范围内(前景色的亮度、饱和度不变,只改变前景波长的情况下),我们可以通过该方法测出各种颜色的最小可探测和最小可分辨色差。
4 总结
本文介绍了使用双色图样测试靶标结合反射式光学系统组成的彩色摄像机颜色分辨力测试系统,该系统通过图像处理算法客观的测量了不同分辨力下彩色摄像机的MDED和MRED。从测试结果分析,我们可以测量和标定彩色摄像机对颜色的分辨能力,尤其对在特殊场合或者在某一特定颜色应用的彩色摄像机的检测提供了客观可行的方法,而且具有方便、快速、准确等特点。该系统也可以应用在对商业摄像机、彩色印染检测摄像机、智能机器人中的人眼仿生相机和彩色医疗设备等颜色分辨力检测方面。
[1] SONG Yuehong, XU Junqing. Digital Camera Color Resolution Test Based on Knife-Edge Method[J]., 2013, 469: 246-250.
[2] 连礼泉. 色差分辨力测量[C]//第十三届全国光学测试学术讨论会论文, 2010: 202.
LIAN Liquan. The measurement of color resolution[C]//13th, 2010: 202.
[3] Jason A Mazzetta, Jason A Mazzetta, Stephen D Scopatz, et al. Relative color delineation testing of visible camera systems[C]//, 2008: 694116.
[4] 荆其诚, 焦书兰, 喻柏林, 等.色度学[M]. 北京: 科学出版社, 1979.
JING Qicheng, JIAO Shulan, YU Bailin, et al.[M]. Beijing: Science Press, 1979.
[5] 顾小超, 胡雯雯, 黄丽俐, 等. 一种离轴抛物面准直光管的设计[J]. 激光与红外, 2008, 38(5): 472-473.
GUO Xiaochao, HU Wenwen, HUANG Lili, et al. Design of the Off-axis Collimator[J]., 2008, 38(5): 472-473
[6] 董伟, 郭颋, 张伟. MRTD客观测量中四杆靶图像的特征提取[J]. 激光与红外, 2002, 32(2): 104-106.
DONG Wei, GUO Ting, ZHANG Wei. The Extraction of Character of Four Bacilliform Target Image in the Objective Measurement of MRTD[J]., 2002, 32(2): 104-106.
[7] 王东伟, 张旭生, 何川, 等. 红外热像仪最小可辩温差客观测评技术[J]. 红外与激光工程, 2010, 39(4): 611-614.
WANG Dongwei, ZHANG Xusheng, HE Chuan, et al. Objective evaluation method for MRTD of IR themal imager[J]., 2010, 39(4): 611-614.
[8] Renee Charriere, Mathieu Hebert, Alain Trémeau, et al. Color calibration of an RGB camera mounted in front of a microscope with strong color distortion[J]., 2013, 52(21): 5262-5271.
[9] Yves Vander Haeghen, et al. An Iamging System with Calibrated Color Image Acquisition for Use in Dermatology[J]., 2000, 19(7): 722-730.
[10] 孙建明, 周世生, 周利国. 基于CIEDE2000色差公式的印刷品色差检测研究[J]. 机械科学与技术, 2011, 30(4): 582-585.
SUN Jianming, ZHOU Shisheng, ZHOU Liguo. Detection of the Printing Color Difference Based on CIEDE2000 Color-difference Formula[J]., 2011, 30(4): 582-585.
[11] 刘浩学, 黄敏, 武兵, 等. 彩色数字图像色差计算方法的研究[J].光学学报, 2012, 32(9): 1-9.
LIU Haoxue, HUANG Min, WU Bing, et al. Study of Difference Evaluation in Color Digital Images[J]., 2012, 32(9): 1-9.
[12] LIU Kuocheng. An Improvement of Just Noticeable Color Difference Estimation[C]//, 2016, 8: 803-806.
[13] N J C Strachan, P Nesvadba, et al. Calibration of a video camera digitizing in the CIE L*u*o* colour space[J]., 1990, 11(11): 771-777.
[14] Montse Corbala´n, Marı´a S. Milla´n, Marı´a J. Yzuel. Color measurement in standard CIELAB coordinates using a 3CCD camera: correction for the influence of the light source[J]., 2000, 39(6): 1470-1476.
Measurement of Color Resolution for Color Cameras
XU Jiwei1,DU Xian2,FANG HaiTang3,XING Jichuan1
(1.,,100081,;2.,433000,;3.,841000,)
In order to calibrate the color resolution of a color camera, an experimental prototype is designed which consists of a double discrete color source, a reflective collimating optical system and four-bar target panel. The dual discrete color sources respectively produce a foreground and background color beam passing through a collimating optical system, and then form a four-bar synthetic image on the color CCD. In the experiment, we extracts the stripe from the target image at each frequency and calculates the color difference of each pixel. Then, we use the criterion to mark the detectable pixels and define the minimum resolvabledifference (MRED) and the minimum detectabledifference (MDED) as two indexes to objectively evaluate the color resolution of the color camera.
color camera, color resolution, four-bar target test target
TN948.41
A
1001-8891(2020)05-0468-05
2019-03-15;
2020-03-06.
徐记伟(1992-),男,河南郸城人,硕士研究生,主要从事光电检测和彩色图像处理等方面的研究。E-mail:maxwell_xjw@163.com。