助扶式智能助老拐杖设计
2020-06-03朱思潮张卫忠徐必刚孙文芳余恒峰
周 杰 朱思潮 张卫忠 徐必刚 张 辉 孙文芳 吴 苗 汪 强 余恒峰
(安徽新华学院,安徽 合肥230088)
目前市面上也已经拥有了一些智能助老拐杖产品,很好的改进了传统机械拐杖的一些弊端, 但是总体的智能化程度远远不够,也显得不够人性化,这已经无法很好的适应现阶段老年人群体的实际需求。因此本文研究的助扶式智能助老拐杖是具有较大的市场空间的,能够为众多老年人群体带来福音。
1 整体的结构设计
作为拐杖的一种,本文研究的助扶式智能助老拐杖最基本的功能就是需要帮助使用者站立,因此就必须要做好结构设计。本文设计的助扶式智能助老拐杖基本结构图如图1 所示,在整个拐杖的顶部,设计了一个塑料握把,帮助老年人能够使用手指进行抓扶。该握把采用了条纹设计, 避免老年人在使用的过程中出现滑动的情况。所使用的塑料材料整体感觉比较温和,即使在寒冷的冬天也不会觉得比较冰冷。在该握把处,还加装了照明灯,这是由于许多老人夜间出行面临着黑暗的环境,稍有不慎就有可能被绊倒。在增加了照明灯之后,能够帮助老人进行照明,提高了安全性能。整个系统设计过程中,对采集到的光强度信号进行实时处理,一旦发现光的强度比较低,就立即自动打开照明灯,如果发现光的强度比较高,就自动关闭照明灯,能够达到省电的目的。该拐杖设计方案中可以看出有一个四角底座,从物理结构上可以看出其稳定性,即使老人完全倚靠在该拐杖上,仍然能够保持较高的平衡性,不至于倾斜。图2 为齿轮组结构图,通过离合器以及减速齿轮组之间的配合,提供一定的推力。在电机设计方面,选用的是直流电机,就是因为该拐杖只能通过内置的电池提供电电池,只能够输出直流电。因此选用直流电机是比较合理的,不再需要经过逆变环节,减少了控制系统的复杂性。该直流电机的额定工作电压为24V。推杆机构采用旋转螺纹设计,螺杆和内杆的长度都是250mm。
2 助扶式智能助老拐杖系统设计
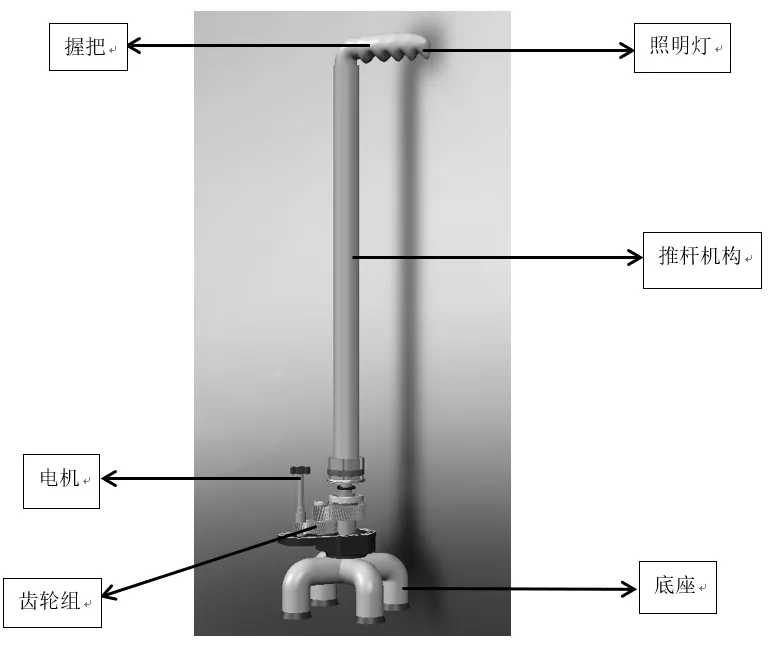
图1 助扶式智能助老拐杖结构设计图
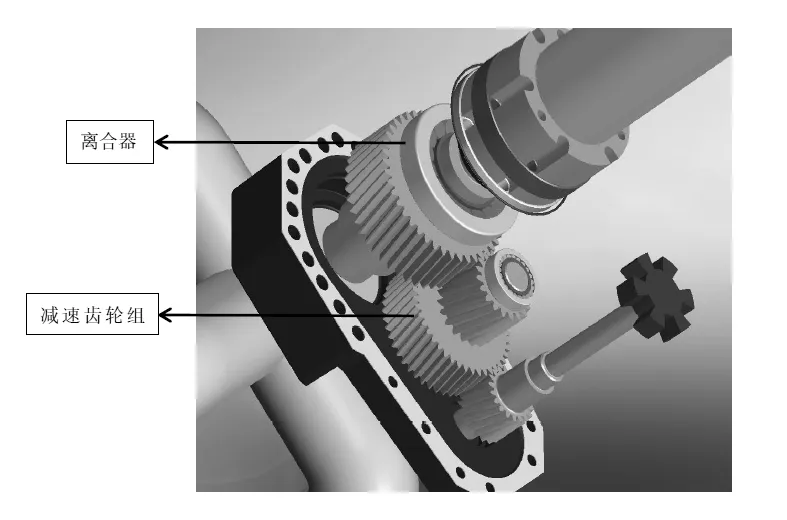
图2 齿轮组结构图
2.1 重要器件的选用。该系统为了能够实现对老人运动状态的监测,就需要使用加速度传感器来得到老人前进的位移速度。最终选择了MPU-6050, 该传感器具有的优势是具有较高的精度,无论是在行进速度比较高的场合还是速度比较慢的情况下,都能够得到比较精确的采样数值。该模块使用了三个十六位模数转换环节。可以根据实际运行情况的需求来确定相应的测量范围。许多家庭为了加强对老年人的保护,会更加迫切的想要知道老年人所处的地理位置。如果每一位老年人都自带一个GPS模块出门,将会带来许多不方便,并且老人也很容易遗忘。因此,可以将GPS模块内置在本文设计的智能助老拐杖内部, 该模块的能耗比较小,因此不用担心会消耗过多的电能而影响到整个系统的续航时间。一旦老人出现了问题,家人就很容易通过该模块来快速锁定老人的位置,从而给予一定的帮助。此外,还需要加装压力传感器,通过该压力模块来采集整个拐杖的承重力情况。要采取一定的抗干扰设计,严格确保所采集到的压力信号的精准度。并且在一些比较恶劣的使用环境中,很容易面临一些其他因素的干扰,而导致获取到的压力值不正确。这也是需要进行优化设计的,本文通过基于STM32 单片机来对压力采集模块进行控制,修正所采集到的压力信息。GPRS模块是现代移动互联网络的重要组成部分,其主要优势是具有较低的价格,并且以较高的速率来实现数据收发。该模块的稳定性比较强,能够实现远距离数据交换。因此将本文设计的助扶式智能助老拐杖运行过程中的各种数据信息进行发送都需要通过GPRS 模块来完成,以便反馈使用者的状态。推杆依靠电机的正反转来完成推拉动作,这样就能够改变推杆的伸缩方向。
2.2 系统运行逻辑。在系统上电开始运行时,首先经过STM32单片机的自检和初始化环节。在自检过程中,首先对各个功能模块的情况进行初始化,采集初始化信号。如果发现存在故障,就可以立即发出警报。经过了该环节之后,在该单片机的控制下,各功能模块不断的对信号进行采集并处理,执行相应的命令。将一些重要的数据信号通过GPRS模块来实现收发,保持拐杖和移动终端之间的流畅信息交互。根据一些功能拓展需求,也可以在该单片机模块上加设摄像头、显示屏等功能,摄像头能够采集老人周围的环境信息,并且通过显示屏模块能够显示一些基本的信息,比如天气状况,拐杖的实际定位等。
3 智能拐杖的设计理念
3.1 功能需求。智能拐杖的设计理念主要包括了以下的步骤:智能拐杖中的控制器可以结合加速度传感器的结果导向,自动判断智能拐杖是否处于平稳运行状态,从而能够依照加速度的判断值来直接判定智能拐杖是否已经摔落。智能拐杖一旦感知到出现摔倒的信号,能够通过拐杖内部的通讯模块向远程信息终端发送智能拐杖已经摔倒的信息,并同时将智能拐杖的地理信息一并发送,使得这些信息能够在手机终端上进行查看。如果智能拐杖没有检测到加速度,将不会发出使用者已经摔倒的信息。由于智能拐杖上的控制器能够在拐杖摔倒以后能够自动驱动压力检测传感器对智能拐杖所感受到的压力是否超过了智能拐杖所能够承受的压力极限。智能拐杖还需要结合有关数据判断是否触发扶起的控制信号。智能拐杖还需要实现能够使得电动推杆伸长的功能,确保能够实现将摔倒的人进行扶起。
3.2 智能拐杖所能够实现的相关功能。结合智能拐杖的设计,智能拐杖在正常工作的过程中,往往可以实现对智能拐杖使用者的实时定位,监护人可以通过所绑定的手机终端来自动获取智能拐杖的位置,从而能够对拐杖使用人的日常生活进行实时监控,确保能够对拐杖所有人的位置进行定位,一旦出现智能拐杖发送异常信息的时候,拐杖能在第一时间将所处的地理信息进行及时的发送,确保实现所设定的监护人能够及时的掌握拐杖使用人所在的地理信息。
4 结论
本文设计了一种新型助扶式智能助老拐杖,具有十分显著的优势。该设计方案能够实时跟踪监测老年人使用者的真实状况,实现对照明灯等的实时控制。并且通过GPRS 模块来对重要的信息进行通信,提高了安全性。并且该设计方案的整体结构设计比较科学,考虑到了老年人群体的真实使用状况,是一种可行性比较高的助老拐杖设计方案。
