基于扩展状态观测器的电动负载模拟器反演滑模控制
2020-06-03代明光齐蓉
代明光,齐蓉
西北工业大学 自动化学院,西安 710129
飞机前轮转弯操纵系统能够操纵飞机在地面滑行过程中转弯,起到纠正飞机航向,保障飞机滑行及起降阶段安全的关键作用。随着功率电传(Power-By-Wire,PBW)技术和机电作动器(Electro-Mechanical Actuator,EMA)伺服系统设计及其高性能控制技术的发展,一些中小型飞机特别是无人机的前轮转弯操纵系统正由传统的液压式替换为电传式[1-2]。电传式无人机前轮转弯系统由EMA驱动,能省去复杂的液压机构及管路,避免了液压油泄漏等问题,且EMA具有结构简单、体积小和控制精度高等优点,能节省安装空间,减轻无人机重量,而EMA性能的优劣直接决定了无人机的滑行和起降性能[3-4]。
电动负载模拟器(Electric Dynamic Load Simulator,EDLS)能够在实验室条件下准确模拟无人机前轮操纵系统在实际运动中的复杂负载特征,以验证和测试EMA伺服系统在各种载荷作用下的动态和静态性能指标。这种实验室仿真负载模拟系统,能够降低成本,缩短研制周期以及通过调节系统参数就可以用于不同型号的EMA伺服系统,具有更强的普适性[5-8]。
随着电机驱动以及电磁转矩高性能控制技术的发展,以伺服电机为驱动核心的EDLS得到了大量的研究和应用[9-11]。面装式永磁同步电机(Surface Permanent Magnet Synchronous Motor,SPMSM)具有转动惯量小、动态响应快、转矩输出精度高等优点,配合符合功率要求的减速机构即可实现大力矩加载,通常用作EDLS的加载执行机构。然而,SPMSM本体具有强耦合,非线性等特点,且不同于传统的位置伺服系统,电动负载模拟器系统是一种被动式力矩伺服系统。被加载EMA机构的伺服运动带来的强位置干扰,会使EDLS产生多余力矩[12],严重影响加载力矩的输出精度。此外,EDLS传动机构中摩擦、间隙等非线性因素也会对加载力矩的输出产生不良的影响,因此,如何设计高性能的控制器是实现高精度加载的关键。
针对EDLS中存在的位置扰动、摩擦力矩、传动间隙以及其他非线性因素对加载力矩精度的影响,文献[13]同时将被加载对象主动运动扰动、摩擦非线性和参数不确定性等因素视为总的外部干扰,利用神经网络和线性差分包含(Linear Difference Inclusions,LDI)构建系统模型,采用并行分布式补偿结构和H∞性能准则实现对外部干扰的抑制,实现高精度力矩加载,但算法较为复杂。文献[14]针对被加载对象的主动位置运动产生的多余力矩问题,提出了一种比例加载谐振(Proportional Resonant,PR)的控制策略,实现了对负载力矩的精确控制。文献[15]提出了一种新型的前馈加反馈的复合控制策略,其中前馈控制采用小脑模型关节控制器,反馈控制采用传统的PID控制器,仿真实验表明该方法能很好地抑制扰动,实现对飞机舵机的高精度力矩加载,但是没有给出实验验证。文献[16]采用鲁棒控制策略解决了被加载对象强位置扰动对EDLS的力矩输出精度的影响,但该算法对系统模型准确性要求较高;文献[17] 采用自适应模糊力矩控制算法,解决算法对系统精确数学模型的依赖,但算法调试对经验要求较高,不利于推广。
反演控制能够简化复杂高阶不确定非线性系统的控制器设计问题[18],滑模控制(Sliding Mode Control,SMC)控制结构简单,不依赖系统的精确数学模型,且对系统中存在的干扰、参数摄动等具有很强的鲁棒性[19]。扩展状态观测器(Extended State Observer,ESO)能用来实时估计系统内外部干扰,观测不确定系统的状态,是一种性能优良的观测器,广泛应用于控制系统中[20-24]。因此,针对EDLS中存在的问题,本文提出了一种基于扩展状态观测器的反演滑模控制策略。通过将EDLS分为2个子系统,利用反演控制的思想,对每个子系统分别设计ESO,以观测出不同子系统中存在的干扰,再通过构建滑模控制器解决干扰误差对系统的影响,利用设计的中间虚拟控制量,逐步递推得到系统所需的控制量,最终实现EDLS的高精度加载力矩输出。
1 电动负载模拟器结构及原理
用于测试电传式无人机前轮转弯操纵系统中EMA伺服系统性能的EDLS结构如图1所示。
根据力矩的传递关系,EDLS主要由加载电机及其配套的驱动系统,测量轴系位置的光电编码器,用于力矩放大的减速机,实时测量轴系转矩的力矩传感器,以及相关的支撑和连接机构等组成。其中,SPMSM为加载电机,是EDLS的力矩加载元件,其输出的电磁转矩经过减速机放大后,通过具有零回传间隙的波纹管联轴器与力矩传感器同被加载EMA伺服系统相连接。并且EDLS通过利用力矩传感器测量的轴系实时转矩和安装在传动轴上不同位置的光电编码器(光编)提供的位置信息,完成相应的力矩闭环控制算法,实现高精度的力矩加载。
由图1可知,EMA伺服系统由EMA控制器及其驱动器和EMA机械本体构成,电动负载模拟器对EMA伺服系统进行力矩加载工作时,EMA伺服系统按照无人机前轮转弯操纵系统实际运行状态给出的运动轨迹作位置伺服运动。无人机前轮转弯操纵系统操纵无人机转弯时,EMA会受到来自地面所带来的复杂的动态载荷,其大小与无人机前轮的转弯角度正相关。因此,实际实验中电动负载模拟器的加载载荷指令,一般由设置的加载梯度系数与安装在EMA端光电编码器测定的转角相乘得到。EDLS控制器利用力矩传感器测定的实际加载力矩信息构成力矩闭环,通过设定的控制算法得出SPMSM驱动系统所对应的控制输入,从而使SPMSM输出合适的电磁转矩,该电磁转矩经减速机放大以及传动机构传动,实现对EMA的载荷模拟。

图1 EDLS结构及原理示意图Fig.1 Diagram of EDLS structure and principle
2 电动负载模拟器数学模型及问题描述
电动负载模拟器是一种典型的被动式力矩伺服系统,结构上EDLS与被加载EMA通过力矩传感器刚性连接,使得EDLS和EMA存在复杂的耦合特性。加载测试时,EMA按期望位置指令做主动位置伺服运动,而EDLS在对EMA进行对应指令载荷加载的同时也需要被动的跟随EMA运动。
EMA的主动位置运动会对EDLS的力矩闭环控制产生强干扰,会在EDLS中产生多余力矩干扰,除此之外,系统中还存在时变参数,传感器量测噪声,摩擦非线性等多种非线性因素,这些因素严重影响了EDLS的加载力矩输出精度,也使得力矩控制变得困难。因此,根据设计的EDLS结构及工作原理,考虑系统中存在非线性和耦合等因素,建立用于EMA伺服系统负载模拟的EDLS的数学模型,并分析影响加载力矩精度的原因,为EDLS的力矩控制器设计提供参考。
SPMSM作为EDLS的载荷输出机构,采用以电磁转矩和电机磁通为控制量的直接转矩控制(Direct Torque Control,DTC)驱动器。通常情况下,其转矩响应时间为1~2 ms,而根据实际技术要求,EDLS的工作频率在20 Hz以内,故基于DTC控制策略的SPMSM能保证电磁转矩响应速度及输出精度。因此,实际工程中,在进行EDLS的力矩控制算法设计时,可以忽略SPMSM驱动器的动态特性和饱和特性,将SPMSM输出的电磁转矩Te与输入到DTC驱动器的转矩控制电压um(t)等效为比例环节,即
Te=Kmum(t)
(1)
式中:Km为DTC驱动器的转矩控制电压um(t)与SPMSM输出的电磁转矩Te的比例系数,其值可以通过对SPMSM驱动系统进行辨识实验获得。
考虑EDLS中存在的摩擦力矩和外部不确定的力矩干扰等非线性因素,则SPMSM驱动系统的运动学方程可以描述为
(2)
式中:Jm为SPMSM转子、减速机和传动轴折合到电机轴上的总的转动惯量;Bm为SPMSM的阻尼系数;ωm为SPMSM的转动速度;Ng为减速机的减速比;TL为负载力矩;Tf为由摩擦非线性、外部不确定干扰等因素引起的未知干扰力矩总和。
力矩传感器用于测量EDLS的加载力矩,忽略其本身惯量和力矩传递过程对加载系统的影响,则力矩传感器可以近似为一弹性模型。根据胡克定律,力矩传感器传递力矩的大小由其两端的角度差确定,故其数学模型为
(3)
式中:KG为力矩传感器的刚度系数;θm为SPMSM的转动角度;θa为被加载EMA的等效转动角度。将力矩传感器和位置传感器的测量误差,以及参数不确定性和未建模动态视为复合干扰,对式(3)求导,可得EDLS输出力矩的动态方程为
(4)
式中:ωa为被加载EMA的等效转动速度;d1为复合干扰项。
由式(3)和式(4)可以直观地看出,被加载EMA运动直接影响EDLS的输出力矩的动态特性。由于EMA的位置信息可以通过安装在力矩传动轴上的高精度位置传感器精确获得,因此可以将被加载EMA的主动位置伺服运动视为对EDLS的已知的强位置干扰。而实际系统中,力矩传感器输出信号不可避免地存在量测噪声,会对闭环系统产生不良的影响。同时考虑到SPMSM驱动系统中存在的未建模动态及参数摄动对EDLS的影响,令x1=TL,x2=ωm,u=um,联立式(1)、式(2)和式(4)可得EDLS的状态方程为
(5)
式中:d2为SPMSM驱动系统参数摄动及未建模动态等未知干扰项;y为电动负载模拟器的输出力矩;ηy为量测噪声信号。
通过安装在EDLS中的力矩传感器和相应位置的角度传感器,EDLS输出的加载力矩及SPMSM的转速可以方便的测量,即EDLS的状态变量x1,x2都可以实时获得。便于设计合适的控制器,在系统存在诸多干扰因素的情况下,实现EDLS对期望加载力矩Tref(t)的精确跟踪。为了方便后续控制器设计和分析,给出如下假设:
假设 1Tref(t)连续,其前两阶导数一致连续且有界。
假设 2θa(t)连续,其前两阶导数一致连续且有界。
假设 3Tf(t)连续,且其导数一致连续且有界。
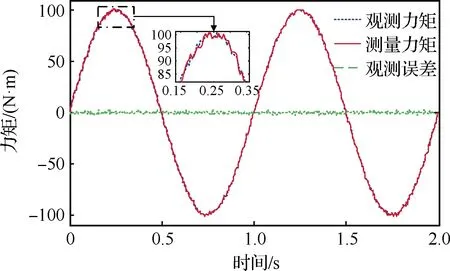
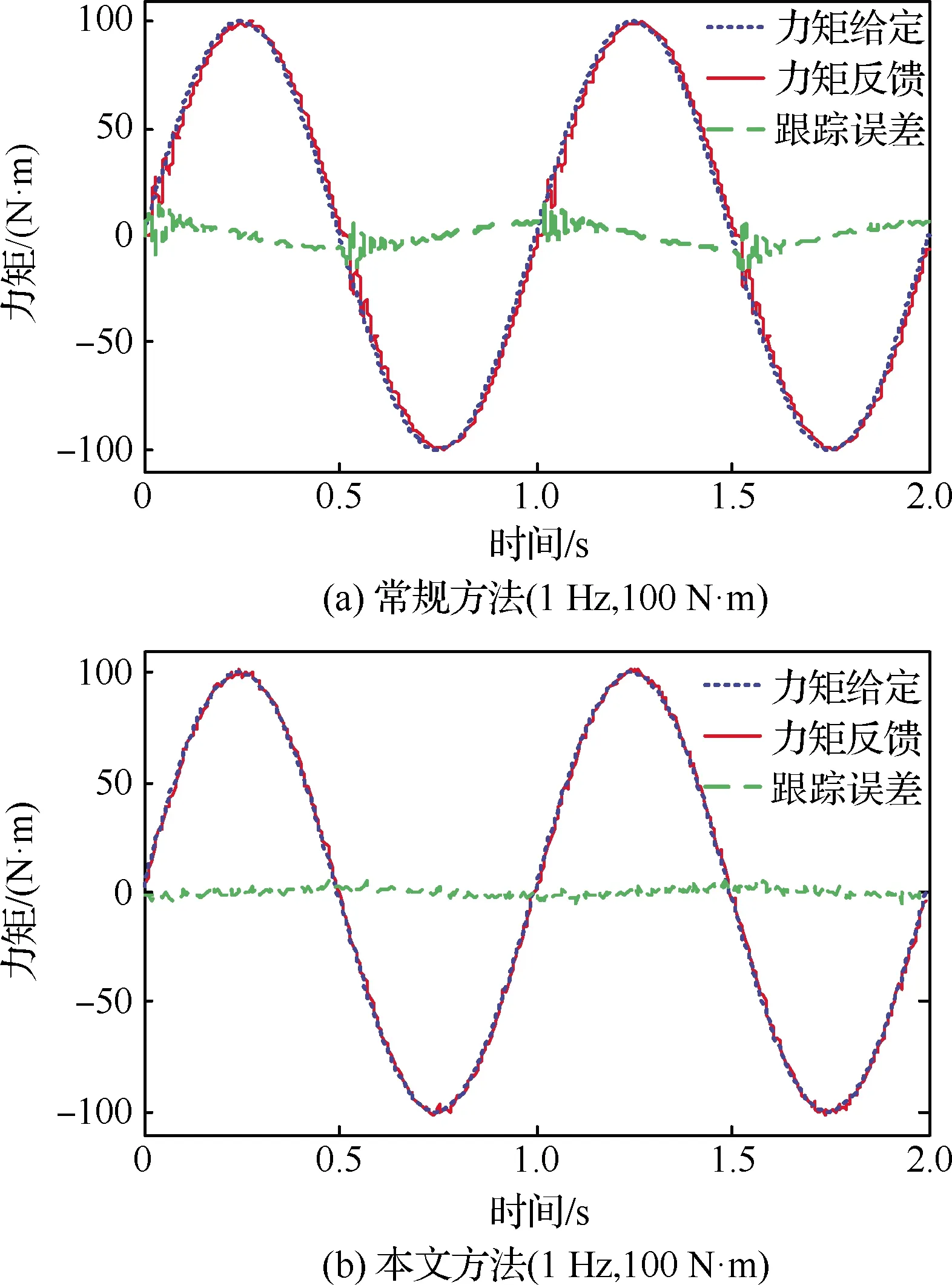
假设 4di(i=1,2)连续有界,且满足Lipschitz条件。即|di| 电动负载模拟器的设计目标是设计控制器,使得状态x1与期望加载力矩Tref的误差能够在有限时间内收敛到零,并且保证电动负载模拟器在存在模型不确定性、未建模动态和内外界干扰等因素情况下加载力矩的跟踪精度和鲁棒性能。本文利用反演滑模控制方法,采用反演递推的思想,将式(5)所述的电动负载模拟器系统,分解为2个子系统,即由式(5)的第1个微分方程描述的负载力矩子系统,记为子系统1,由式(5)的第2个微分方程描述的SPMSM驱动子系统,记为子系统2,对2个子系统分别设计对应的滑模控制器,其控制框图如图2所示。由图2可知,基于扩展状态观测器的EDLS反演滑模控制器的基本设计步骤如下: ① 通过对子系统1构建带有滤波器的ESO,以抑制低通滤波器对ESO观测性能的影响,同时观测出不确定性和干扰的值z12,结合滑模控制强鲁棒性的优点,将EDLS的状态变量x2作为子系统1的虚拟控制量设计滑模控制器,用ESO干扰量的值替代常规滑模控制的高频切换控制项,得出子系统2所对应的参考给定量x2r;② 针对子系统2中存在的参数摄动和未建模动态等因素,设计非奇异终端滑模控制器,使得跟踪误差能在指定的时间内收敛,得出最终控制量u,即EDLS所需的加载力矩控制电压。从而,能够使得EDLS输出的负载力矩达到期望的性能指标。 图2 基于ESO的EDLS反演滑模控制框图Fig.2 Backstepping SMC block diagram of EDLS based on ESO 考虑EDLS的负载力矩子系统: (6) 将状态变量x2作为子系统1的虚拟控制量,控制目标为设计虚拟控制量x2r,使得子系统1的状态x1能在有限的时间内实现对期望的加载力矩Tref的无误差跟踪。在进行控制系统设计时,状态x1可以通过安装在EDLS上的力矩传感器获取,但实际力矩测量中往往含有随机量测噪声,因此,工程实际中,为了滤除力矩传感器输出的高频噪声信号,设计如下的低通滤波器: (7) 式中:τ>0;x1为力矩传感器的真实输出信号;x0为滤波后的信号。 定义负载力矩子系统的误差及其对时间的导数分别为 e1=x0-Tref (8) (9) 实际工程中,由于EDLS中低通滤波器在消除量测噪声的同时,也会使实际的输出信号产生一定的相位偏移,故低通滤波器的动态不可忽略,且力矩传感器的量测噪声会影响传统ESO的观测性能[25]。因此,首先将x0扩展为一阶状态,而后把干扰d1与EMA的位置扰动ωa的总和x1d=(-KGωa+d1)视为复合扰动项,并通过构建ESO对复合干扰项x1d进行估计。记h1(t)= dx1d/dt,由假设2和4,可知h1(t)有界,满足|h1(t)| (10) 式中:b0=KG/Ng。扩展的系统状态x0为滤波后的负载力矩信号,消除了量测噪声对负载力矩子系统的影响,同时补偿低通滤波器对实际加载力矩的输出信号的相位偏移,为了估计x1d的值,设计如下带有滤波器的三阶ESO[25-26],记为ESO1: (11) 式中:β11、β12和β13为ESO1的增益系数;E10为ESO1对扩展状态x0的估计误差;Z10、Z11分别为扩展状态x0和状态x1的估计值;Z12为总和干扰x1d的估计值。记:E11=Z11-x1,E12=Z12-x1d,联立式(10)和式(11),可得 (12) 实际工程中,通常根据加载频率要求和测量得到的力矩传感器输出信号,来设计低通滤波器参数τ,可以认为τ为已知量,故通过选择合适的扩展状态观测器增益β11、β12、β13,可以使得Ao1为Hurwitz矩阵,即Ao1的所有特征根都处于左半平面。如前所述h1(t)有界,这样以来ESO1是有界输入-有界输出(Bounded-In Bounded-Out,BIBO)稳定的[23]。因此,为了简化ESO1的参数设计,参考文献[23,26]所采用的极点配置方法,可以将Ao1的特征根配置在同一位置-ωo1,即 λ(s)=det[sI-Ao1]=(s+ωo1)3 (13) 式中:λ(s)为Ao1的特征多项式;I为单位矩阵;ωo1为ESO1的带宽。通过式(13)系数匹配的方法,可得ESO1的增益系数β11、β12、β13,即 (14) 至此,通过构建的ESO1可以获得负载力矩子系统的总和干扰x1d的估计值Z12。为了获取虚拟控制量x2r,并实现状态x1在有限的时间内实现对期望的加载力矩Tref的无误差跟踪,设计滑模面: (15) (16) 将式(16)中负载力矩子系统的总和干扰x1d替换为其估计值Z12可得负载力矩子系统的虚拟控制量x2r为 (17) 对负载力矩子系统,定义如下Lyapunov函数: (18) 考虑SPMSM驱动子系统: (19) 定义跟踪误差变量e2=x2-x2r,其中x2r为由子系统1得出的虚拟控制量。针对实际中,子系统2存在参数摄动和干扰等因素,控制任务是设计控制器,使得跟踪误差e2在指定的有限时间内收敛,为此,构建二阶ESO对干扰进行估计。由于式(19)中的状态变量x1和x2可以由安装在EDLS上的传感器获得,而未知干扰力矩总和Tf和未知干扰项d2无法从传感器获取,为了方便ESO的设计,记: (20) (21) 式中:f2(x1,x2)为已知系统信息总和;x2d为未知总扰动项。记h2(t)= dx2d/dt,由假设3和4,可知h2(t)有界,即|h2(t)| (22) 式中:b1=Km/Jm,构建如下二阶ESO[21],记为ESO2: (23) 式中:β21、β22为ESO2的增益系数;E21为ESO2对状态x2的估计误差;Z21为状态x2的估计值;Z22为未知总干扰项x2d的估计值。记:E22=Z22-x2d,联立式(22)和式(23),可得 (24) 参考3.1节中ESO1增益的选取方法,首先,选定子系统2所用的ESO2的带宽ωo2;其次,通过选取ESO2的增益β21、β22,使得Ao2的特征根配置在同一位置-ωo2。以此确保Ao2为Hurwitz矩阵,则β21、β22的值分别为 (25) (26) 式中:γ为正实数;p和q为正奇数,且q 定理 1 对于式(19)所示的子系统2,若采用式(26)所述的滑模面,设计控制器设计为 u=u0+u1 (27) (28) (29) 式中:ε>L1,k2>0,k3>0,c2>0,则子系统2的跟踪误差在有限的时间内收敛到零。 证明:由式(22)和式(27)可得 (30) 将式(28)代入式(30),可得 (31) 将式(31)两边同时对时间求导,可得 (32) 将式(29)代入式(32),可得 sgn(S2)-(k3+c2|e2|)S2 (33) 对S2求导可得 (34) 将式(33)代入式(34),可得 (k3+c2|e2|)S2] (35) 从式(35)可以看出,误差e2的幅值可用于调节滑模面的趋近速率,即e2越大,趋近速率越大,系统从非滑模面上的点趋近到滑模面上的时间也越短。 由式(35),有 (36) (37) (38) 定理 2 对于式(5)描述的EDLS,在假设1~4成立的前提下,采用式(11)所述的带有滤波器的三阶ESO1和式(23)所述的二阶ESO2,设计出如式(17)所示的虚拟控制量,采用式(27)所示的负载转矩控制电压。通过对用到的ESO分别选取合适的增益系数β11、β12、β13和β21、β22,并取适当的滑模面参数c1、k1、γ、p和q以及控制器参数ε、k2、k3、c2,则滑模面S1和S2可达,EDLS的跟踪误差会在有限的时间内收敛到零。 证明:对式(38)求导可得 (39) 故,滑模面渐进可达,由非奇异终端滑模特性,可得EDLS的跟踪误差在有限时间内收敛到零。证毕。 无人机前轮转弯操纵系统EMA的电动负载模拟器系统实验台如图3所示,主要包括SPMSM及其驱动系统、减速机、联轴节、光电编码器、力矩传感器,基于DSP的加载控制器和工控机等。 SPMSM电机主要参数为:额定电压380 V,额定功率3 kW,极对数为5,额定转速3 000 r/min,额定转矩9.55 N·m,瞬时最大转矩28.6 N·m,转动惯量0.000 697 kg·m2,摩擦系数0.000 18 N·m/(rad·s-1)。 EDLS相关参数为:减速机减速比Ng=35,由系统辨识得到的Km=0.955 N·m/V,用于力矩传感器滤波器参数τ=60π。 EDLS对无人机前轮转弯操纵系统EMA进行电动负载模拟实验,要求在EMA作位置伺服运动时,EDLS对EMA施加负载力矩,模拟真实情况下EMA所受载荷的情况,用来测试EMA的性能。根据实际系统要求,设定如下实验工况:EMA的运动频率f=1 Hz和4 Hz;EMA的给定位置信号为θref(t)=(8(°)/f)sin(2πft);根据EMA实际运动情况,EDLS期望的负载力矩与EMA的位置相关设定为Tref(t)=12.5fθref(t)。 根据实验工况,本文采用的基于扩展状态观测器的反演滑模控制器。为了解决控制量u中由于符号函数带来的抖振问题,采用S2/(|S2|+σ),σ为正实数,来代替sgn(S2),即在误差容许范围内,以牺牲一定的控制精度为代价,来减少抖振对系统的影响。相关参数设置如下:设置ESO1的带宽为ωo1=200π,则ESO1的增益系数分别为β11=540π,β12=2 000π,β13=133 333.3π2;设置ESO2的带宽为ωo2=1 000π,则ESO2的增益系数分别为β21=2 000π,β22=106π2;反演滑模控制器参数为:c1=1,k1=200,γ=5,p=3,q=7,ε=100,k2=200,k3=180,c2=0.1,σ=0.001。 图3 EDLS实验测试平台Fig.3 Experimental test platform of EDLS 为了验证采用本文控制器时EDLS加载力矩跟踪性能,与传统的反馈加前馈的力矩闭环控制方法在同工况下分别进行EMA的力矩加载实验。电动负载模拟器的性能指标要求是:加载频率1 Hz和4 Hz,在EMA同频运动的情况下,要求加载力矩的跟踪误差≤10%FS,相角变化≤10°。 工况1 飞机前轮转弯操纵系统EMA伺服机构正弦运动,运动频率为1 Hz,最大工作角度为±8°,即EMA位置指令信号为θref(t)=8°sin(2πt),则EDLS的加载指令为Tref(t)=100sin(2πt)。首先给出采用本文方法时,所设计的扩展状态观测器的跟踪结果如图4所示,对比实验结果如图5所示。 工况2 飞机前轮转弯操纵系统EMA伺服机构正弦运动,运动频率为4 Hz,最大工作角度为±2°,即EMA位置指令信号为θref(t)=2°sin(8πt),则EDLS的加载指令为Tref(t)=100sin(8πt)。同工况1一致,首先给出采用本文方法时,所设计的扩展状态观测器的跟踪结果如图6所示。 图4 1 Hz和100 N·m加载力矩观测结果Fig.4 Observation result of 1 Hz, 100 N·m load torque tracking 图5 1 Hz和100 N·m加载力矩跟踪测试曲线Fig.5 Test curves of 1 Hz, 100 N·m load torque tracking 图6 4 Hz和100 N·m加载力矩观测结果Fig.6 Observation result of 4 Hz, 100 N·m load torque tracking 图7 4 Hz和100 N·m加载力矩跟踪测试曲线Fig.7 Test curves of 4 Hz, 100 N·m load torque tracking 对比实验结果如图7所示。为了分析相同工况下,不同控制策略的力矩跟踪效果,由于EDLS的在和曲线为EMA位置的函数,可以将EMA的实时位置和相对应的力矩误差绘制在同一图中,以分析不同控制方法下的力矩跟踪效果,结果如图8所示。 2种工况下加载力矩观测结果与测量结果对比分别如图4和图6所示,可以看出系统在2种工况下都能准确地观测出加载力矩,说明ESO对EDLS输出的加载力矩具有较高的观测精度。由图5和图8(a)的结果分析可得,1 Hz和100 N·m的工况下,间隙的存在使得EDLS在过零时造成力矩冲击,而常规的控制方法很难处理系统中存在的间隙死区和摩擦非线性等因素对加载力矩的影响,其力矩控制精度基本满足跟踪误差≤10%FS,相角变化≤10°。本文方法明显能处理这些非线性因素对力矩控制精度的影响,其跟踪误差≤0.92% FS,相角变化≤3.64°。在4 Hz和100 N·m 的工况下,由图7和图8(b)的结果分析可得,随着加载频率的提高,常规的方法很难处理系统中存在的齿隙,摩擦等非线性因素对EDLS力矩加载精度的影响,且力矩控制精度难以满足系统指标,而采用本文方法,其加载力矩跟踪误差≤2.97%FS,相角变化≤5.73°,虽然相较于1 Hz的情况,性能有些下降,但是力矩跟踪依然具有很高的性能。因此,本文所用方法,能够使得EDLS具有较高的力矩输出精度和鲁棒性能。 图8 不同控制策略的EMA位置与加载力矩误差曲线Fig.8 Error curves of EMA position and loading torque of different control strategies 本文提出的基于扩展状态观测器的电动负载模拟器的反演滑模控制方法具有如下优势: 1) 该控制方法对系统中存在的诸如间隙、摩擦非线性等不确定的干扰,以及系统的参数扰动和未建模动态的扰动具有较强的鲁棒性能。 2) 该控制方案中的扩展状态观测器能够实时观测出系统的扰动量,从而能够实现扰动的动态补偿。 3) 本文提出的控制方法能够实现有限时间的加载力矩载荷谱的跟踪,具有较高的力矩控制精度和较好的动态性能。3 电动负载模拟器的控制器设计

3.1 负载力矩子系统设计


3.2 SPMSM驱动子系统设计



3.3 控制系统稳定性分析
4 EDLS加载实验分析
4.1 实验平台及参数设置

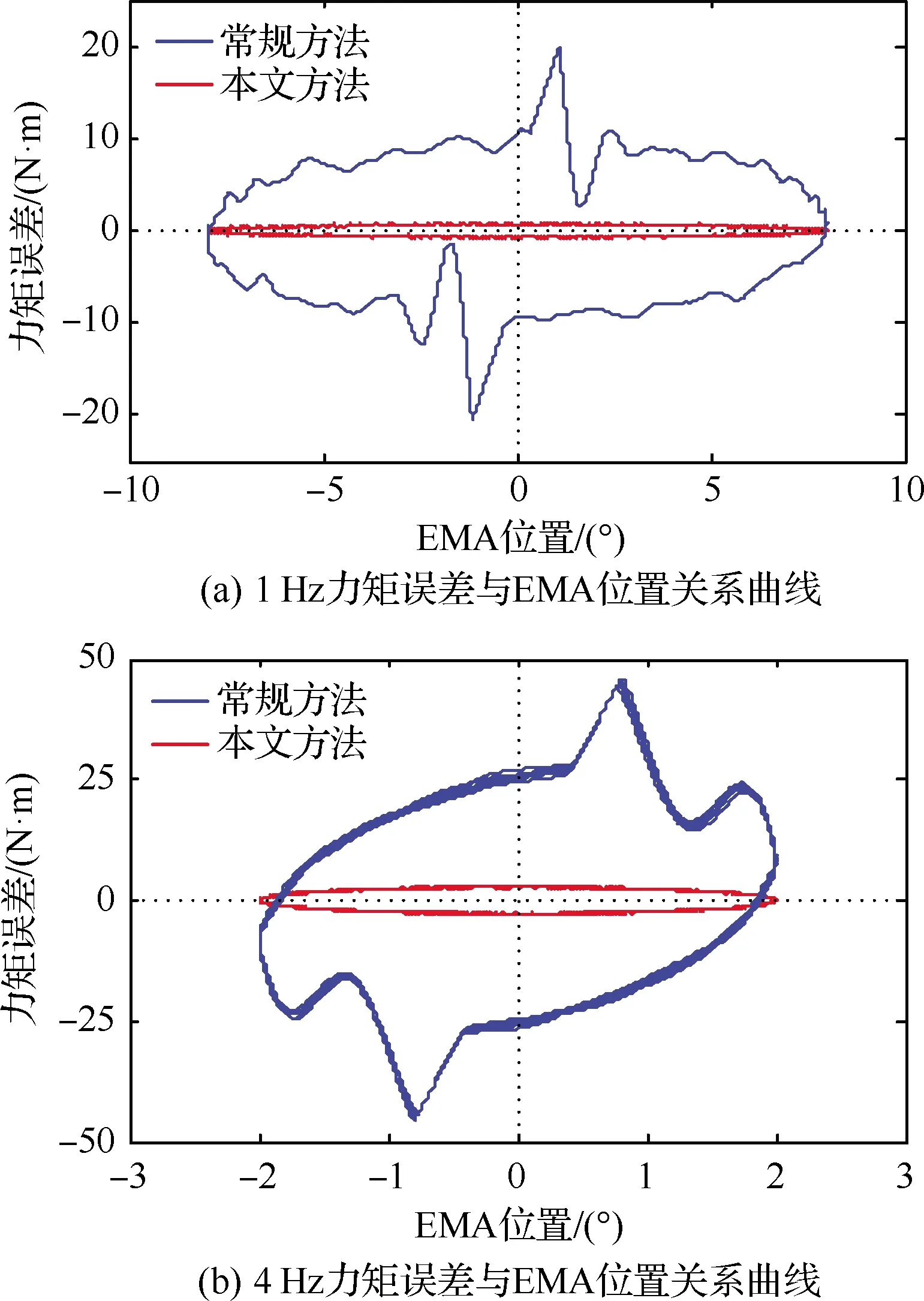
4.2 实验结果与分析


5 结 论
