基于多目标遗传算法的主动悬架滑模控制器设计
2020-06-02高坤明秦志昌郭宗和马驰骋马迎坤
高坤明 秦志昌 郭宗和 马驰骋 马迎坤
(1.山东理工大学 交通与车辆工程学院, 山东 淄博 255000; 2.郑州宇通重工有限公司, 郑州 451482)

主动悬架是未来汽车悬架的主要发展方向, 由于能够实时地产生与路面激励和车身姿态相适应的力,使车辆处于最佳的减振和行驶状态而被广泛关注[1].主动悬架是一个不确定性较高的复杂系统[2-3],汽车在行驶过程中要面临复杂多变的路面情况,悬架系统的刚度和阻尼特性根据汽车的行驶条件进行动态调节[4],主动悬架系统是一个与控制器密切相关的系统,控制策略的优劣直接影响主动悬架性能的好坏,因此选择和设计与主动悬架系统相匹配的控制策略显得尤为重要[5].运用在主动悬架系统的控制方法主要有滑模变结构控制、线性最优控制、模糊控制、PID、LQR 控制等[6-9].其中滑模控制用于处理系统的非线性、模型的不确定性和外部扰动,具有较强的鲁棒性.近年来,滑模控制被广泛应用于非线性不确定性系统问题[10-14].遗传算法是一种随机优化搜索方法[15], 对种群进行初始化后,通过选择、交叉和变异运算等操作,使得整个种群朝着适应度值更优的方向进化,最终收敛得到最优解[16-17].提升车辆乘坐舒适性的主要手段是控制车身垂直加速度,然而车身垂直加速度与悬架动行程以及车轮动载荷存在冲突,为了权衡多个相互冲突的性能目标,多目标优化控制方法在悬架的设计优化中被深入研究[18]. 为进一步提高车辆主动悬架系统的乘坐舒适性和行驶稳定性,本文以建立的二自由度1/4车辆主动悬架系统模型为基础,结合滑模控制理论、李雅普诺夫稳定条件和赫尔维茨稳定性判据建立一种基于二自由度主动悬架的滑模控制策略,利用遗传算法对滑模控制器参数进行多目标优化.
1 车辆主动悬架系统模型
本文参考文献[19],建立二自由度1/4车辆非线性主动悬架模型,如图1所示.

图1 二自由度1/4汽车模型
图中轮胎简化为一个常系数弹簧k2和一个常系数阻尼c2,悬架由弹簧k1、阻尼c1和主动控制力u组成,m1和m2分别为簧载质量和非簧载质量,xs、xu和q分别表示悬架弹簧未变形时车身位移、轮胎位移和随机路面不平度输入,x1、x2为从平衡位置的悬架位移.
建立悬架系统的运动方程,其中悬架的弹性元件包含非线性特性,悬架系统的动态模型如下:

式中:k11和k12分别为悬架弹簧的线性刚度和非线性刚度,g是重力加速度,静态时轮胎受到的总压力为(m1+m2)g,产生的位移xur为:

考虑到非簧载质量的参考位置xur,此时簧载质量的参考位置xsr被定义为:

其中δ0<0,是弹簧静态偏移.将悬架系统模型的状态变量定义为:

系统的状态方程为:

其中:
2 滑模控制器设计
2.1 滑模控制
定义两个状态的跟踪误差为:

式中:x1d(t)和x3d(t)是x1(t)和x3(t)的期望参考轨迹,滑模面的表达式如下:

其中:λ1、λ2、μ1 和μ2 是滑模面参数,又因为在滑模面上满足s(t)=0和˙s(t)=0,则
式 中:ρd=λ1˙x1d(t)+μ1¨x1d(t)+λ2˙x3d(t)+μ2¨x3d(t),根据公式(12)得到等效控制输入为:

其中:σ=1/(μ1b1-μ2b2).
等效控制器(13)要求系统具有精确模型并且不存在外界干扰,然而实际系统存在诸多不确定性并且反馈回路往往受到环境噪声的干扰,导致实际系统不能单纯由等效控制器进行控制.为克服系统不确定性等影响,引入如下切换控制律[20]:

由式(13)和(14)得到可以用于控制实际系统的实时可变的滑模控制力如下:


其中:Fs1=αk11(x1-x3+δ0)3、Fs2=a、Fs3=b分别是f(x)、q和˙q估计的误差极限.非线性弹簧刚度估计误差极限的确定是由方程的线性部分系统模型为基础假设的,α为非线性刚度控制系数,随机路面不
平度输入的估计误差极限是由路面函数假设的,a、b分别为路面函数和路面函数导数的极值[21].
2.2 滑模控制器稳定性证明
为了满足滑模控制的到达条件,利用Lyapunov稳定性理论对滑模控制进行稳定性验证,选取Lyapunov候选函数[11], 将式(16)进行全微分,可以得到:


当上式中K取值如下时,˙V(x)≤-η|s(t)|成立.

由 于 期 望 状 态 值 为x1d=0,x3d=0,˙x1d=0,˙x3d=0,可知ρd(t)=0.
在实际的控制中,因为饱和函数的连续性可代替符号函数削弱系统在滑模控制中产生的抖振,所以在控制器的设计中通常采用饱和函数sat(s(t),φ)替换符号函数sign(x)来避免高频振动[12],饱和函数如下:

式中:0<φ<1是饱和函数边界层厚度.
2.3 滑模面稳定性条件
为满足滑模控制的稳定性条件,在滑模面上s(t)=0,可以求得:

将等效控制ueq代入方程(6)第3行并做微分,

其中:

根据动力方程的变换可以定义一组新的状态变量:

通过新的状态变量,可以将方程(24)写为:

又因为方程(24)的平衡条件为y1=y2=y3=0.因此方程(25)在原点处局部线性化可以得到:
线性化系统(26)的特征方程为:

其中γ是Laplace变量,且

由Hurwitz稳定性可得:
进而得出滑模面稳定性条件

3 多目标优化设计
3.1 目标函数选择
在保证行驶稳定性的同时,能够尽可能地满足驾乘人员对乘坐舒适性的需求是车辆悬架系统优化的主要目的.对于车辆主动悬架系统来说,乘坐舒适性主要由车身垂直加速度和悬架动行程体现,行驶稳定性的评价指标主要由轮胎动载荷目标体现.目标函数如公式(31)所示:
式中:F=k2(x3(ti)+xur-q(ti))+c2(x4(ti)-˙q(ti)),f1、f2和f3分别为车身垂直加速的均方根、悬架动行程的均方根和轮胎动载荷均方根.
3.2 约束条件
对主动悬架车辆进行多目标设计优化时,为了保证汽车行驶的安全性,除了要满足滑模面稳定性条件(32)外,还必须保证悬架动挠度所受碰撞器限制始终在安全范围内,即

式中:xR为允许的最大悬架动挠度.
3.3 多目标优化问题的提出
主动悬架设计优化的实质是具有多个变量及各类约束的优化问题,控制性能以及稳定性由滑模控制器中的6个参数K=[λ1,μ1,λ2,μ2,η,φ]所决定,通过选择这些参数的取值来满足3个目标,因为所有目标都是求最小值,因此主动悬架的多目标优化设计问题写成以下函数:

式中:约束条件g(K)>0,由不等式组(30)和(32)共同构成.
3.4 多目标遗传优化算法
在确定目标函数和约束条件后,结合遗传算法可以输出最优个体,通过迭代过程实现选择、交叉和变异,不断更新个体和种群,最终获得满足优化目标的染色体,本文结合遗传算法对主动悬架的滑模控制器参数进行多目标优化.基于设计者经验和多次的仿真实验,最终选择参数K的取值范围如下:

初始种群数量设为200,最大遗传代数为500,交叉概率设为0.8,变异概率设为0.01,停止代数为500,在Matlab下建立仿真程序,仿真时间为15s,仿真结果如图2~3所示.

图2 多目标优化解集
图2为多目标优化解集,图3为在平面坐标系下最优参数取值.其中图3中每个最优参数取值区间图都表示了6维坐标中的3个维度,颜色的深浅代表某个参数的大小,4幅最优参数取值分布图显示了滑模面的6个参数的取值范围.b1,b2,b3,b4分别为多 目标优化解集中f1、f2和f3的目标函数值分别最小和3个目标函数值折中最优时的解的对应位置,各代号对应的参数位置见表1.
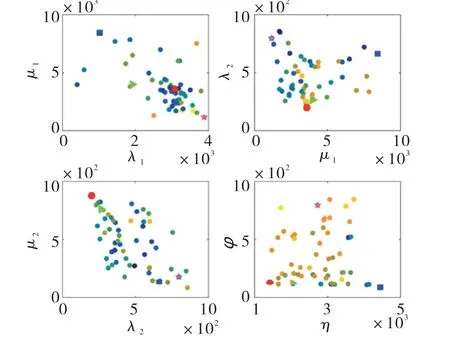
图3 最优参数取值

表1 参数对应解
4 仿真结果分析
根据已建立的模型和算法,进行实例仿真分析,本文利用文献[19]所给的轿车悬架系统以及路面条件为例,包括汽车模型参数以及路面函数,以此证明本文设计的基于遗传算法主动悬架滑模控制器的正确性与可行性,车辆模型参数见表2.
在仿真过程中,路面情况由路面函数(36)决定,模拟的道路轮廓由正弦扰动叠加在凸起和凹下的路面函数上,道路轮廓是时间t的函数.

式中:d(t)=0.002sin2πt+0.002sin7.5πt.
根据已经得到的多目标优化解集,在Matlab环境下建立仿真程序进行仿真验证.从优化结果中选取4种不同要求下的主动悬架在优化前后的控制器参数,如表3所示.

表3 滑模控制器参数
图4~8 分别显示了优化前后的主动悬架在4种不同要求下的车身垂直加速度、悬架动行程、轮胎动载荷以及控制器控制力对比曲线,其中图5和图7分别为车身垂直加速度和轮胎动载荷的幅频特性曲线.


图4 车身垂直加速度对比曲线
图5 车身垂直加速度幅频特性曲线
从图4~5可以看出,对优化前后进行对比,采用GAS1控制时,车身垂直加速度得到了最有效的控制,而采用GAS3控制效果最差.但是从图6中可以发现,在满足悬架动挠度始终保持在所允许的最大限值的同时,采用GAS3控制时,悬架动行程略大于SM控制,GAS1、GAS2和GAS4控制时悬架动行程均优于SM 控制.而从图5和图6中也可发现,采用GAS4控制时,车身垂直加速度和悬架动行程都得到了有效控制,而且控制效果都要优于SM 控制.

图6 悬架动行程对比曲线
类似地,从图7~8可以看出,当采用参数GAS3时对轮胎动载荷控制效果最好,但是对车身加速度和控制力方面提出了更高的要求,尤其是控制力方面,采用GAS3需要的控制力高达2000N,这对于主动悬架来说是非常高的挑战.但是从图8中可以发现,采用GAS2和GAS4控制时,控制力在1000N 左右,这是比较容易实现的.
对比图7和图8中的曲线,采用多目标优化控制参数GAS4时,控制效果较SM 控制策略得到了较大的改善,而且控制要求低,容易实现.
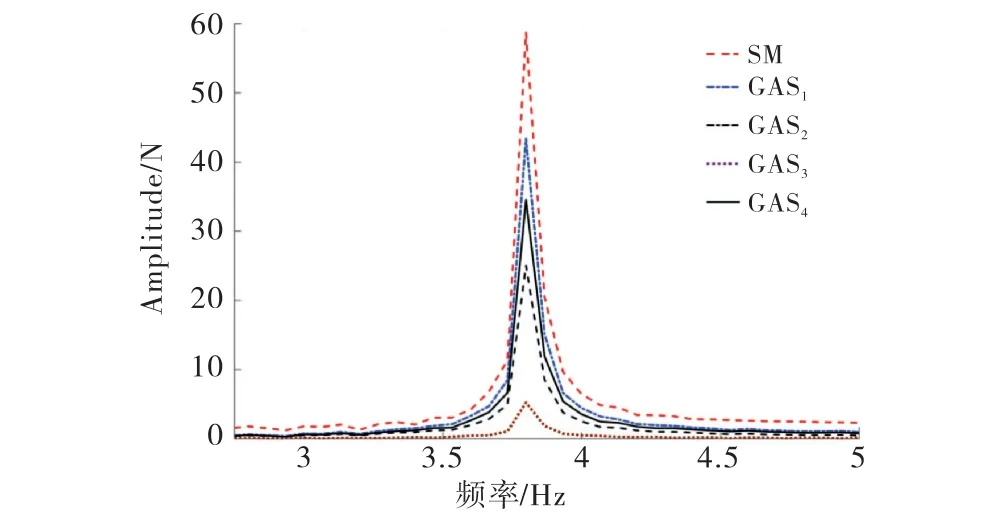
图7 轮胎动载荷幅频特性曲线

图8 控制力变化对比曲线
综合来看,采用多目标优化控制方法优化后的主动悬架车身垂直加速度明显减小.从表4计算得到,采用GAS4进行控制后的主动悬架车身垂直加速度均方根值较优化前减小了18.3%,极大地改善了车辆的乘坐舒适性;同时,优化后的主动悬架动行程保持在悬架动挠度范围内且均方根值减少了16.1%,从而有效地提高了汽车的乘坐舒适性;同样地,优化后的轮胎动载荷的均方根值减少了33.2%,有效地改善了汽车轮胎的抓地能力,减少了侧向力的产生,从而提高了汽车的行驶稳定性.

表4 仿真结果