旋翼无人机位姿控制与自主返航技术
2020-06-01杨寒石张楚晗
杨寒石,张楚晗
(黑龙江大学,黑龙江哈尔滨 150000)
0 引言
目前大部分无人机使用GPS 的定位技术进行控制路线,基于视觉导航进行控制旋翼无人机,要求旋翼无人机的前部和底部安装摄像头进行图像采集。
1 旋翼无人机倾斜调度测量
重点介绍无人机的惯导和气压硬件,旋翼无人机在飞行过程中会有不同的姿态,在测量姿态的过程中用到惯导中的加速计和陀螺仪,如图1 所示,假设在无人机飞行过程中飞机的倾斜角度为θ,则在X 轴的加速度为X=-gsinθ,Z 轴的加速度为Z=gcosθ,可以得到θ=arctan(-X/Z)。但是在无人机飞行过程中由于环境因素导致加速不稳定,则需要陀螺仪进行角速度ω 的测试,其中θ 和ω 的关系可以通过来计算,所以在估算飞机倾斜角度的时候需要加速计和陀螺仪密切配合。
2 旋翼无人机倾斜高度测量
在物理学中可以通过大气压来估计无人机飞行的高度公式为-ρgdh=dP(2.1),理想气体方程为ρRT=MP(2.2),其中ρ 为密度,g 为加速度,P 为气压,R 是常数,T 是飞行温度,M 是摩尔质量,可以得出h=-RTdP/gMPd(2.3),则可以通过无人机测量出的飞行数据,得到无人机飞行的高度。
3 传统的姿态控制和位置控制
参考姿态和通过算法计算的的姿态相减,可以得到具体的Δα 和Δα,无人机的参考姿态是人工输入,将Δα、Δα 输入到姿态控制器中,主要是为了让无人机的实际角度尽量接近参考姿态,姿态控制器将数据输入到无人机中,控制飞机。
现在市面上的无人机都是基于GPS 的,提前设定好信号,然后通过GPS 进行控制,然后通过遥控无人机,无人机接收到信号后进行返航,或者设定好具体路线后,进行返航。
4 无人机控制算法
重点介绍无人机的控制算法,无人机通过投影的方法来获取具体的偏移量,然后可以通过偏移量来计算无人机需要进行姿态控制时偏移的大小,控制无人机的角度和速度,在控制角度和速度的时候通过控制器进行输出,输出具体的基本信息,无人机控制算法最重要的一点就是进行定点控制,定点控制需要使用PID 控制器,具体的控制图如图1 所示。
假设无人机底部摄像头捕获的图像中仅有一个地标,无人机参照这个地标进行定点悬停,则需要在图像处理模块中计算无人机机身投影点与地标的相对位置ΔS=(Sx,Sy),然后由PID控制器分别对Sx,Sy做PID 控制,更新结果得到参考俯仰角、横滚角,之后的对于姿态的内环控制由旋翼无人机机载的嵌入式系统完成,即有公式(1)。
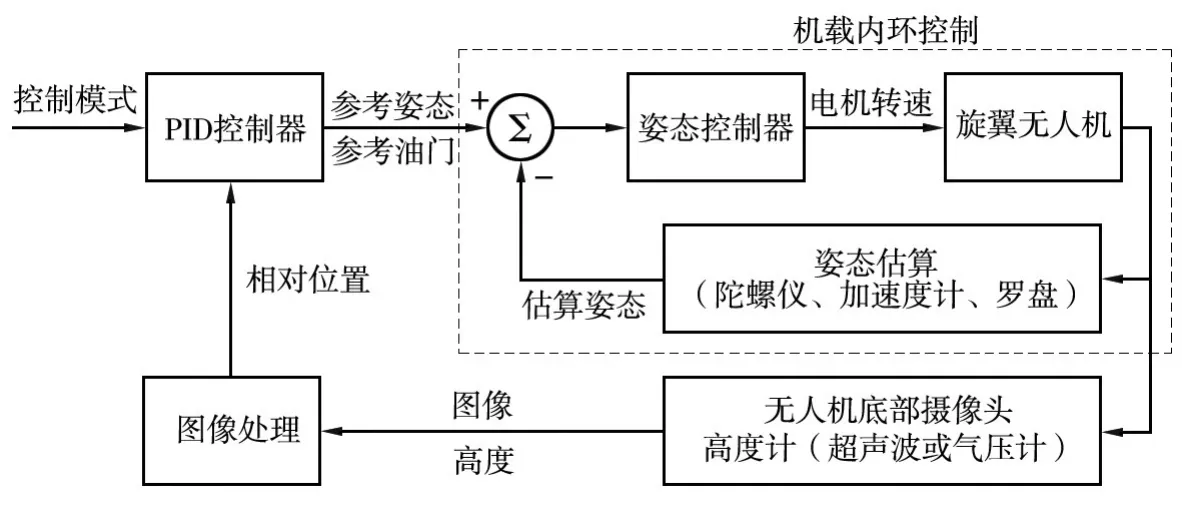
图1 基于图像的无人机控制图

飞机的高度控制也是很重要的一个参数,在飞机高度控制中一般采取两个方案:
(1)飞机可以安装一个高度测量机,根据气压进行推算出飞机目前的高度,测量出飞机目前的高度后和参考高度作差可以计算出偏移量,然后进行PID 控制,输出的具体参数可以调节飞机的高度做内环控制。
(2)使用飞机的摄像头进行拍照,拍照后能够计算物体的面积,计算出来的面积和物体的实际面积进行比较,引入一个参考面积,如果计算出的面积大,说明飞机需要上升,如果计算出的面积小需要进行下降,参考面积可以人工设置,也可以是飞机在特定高度拍照的面积,然后通过参考面积来控制飞机的飞行高度,例如在300 m 巡航是飞机拍摄的物体A 面积是100 m2,如果现在飞机拍照的照片是200 m2说明飞机还没飞到300 m 的高度,需要提高高度,如果拍照的是50 m2,说明飞机飞机的高度高于300 m,需要降低高度。需要注意的是,如前文所阐述的,物体的实际长度与像素点长度、无人机高度成正比,则可知物体的实际面积将会与像素点的面积与无人机高度的平方成正比,则可知物体的实际面积将会与像素点的面积与无人机高度的平方成正比。于是我们根据面积计算高度差时需要先对图像中地标面积与参考面积开平方根,再作差进行PID 控制,即得出式(2)。

此外,飞机的底部是有一个摄像头的,摄像头可以拍摄图片,并且可以运用光流算法估算飞机的速度,因此可以在姿态控制和位置控制之间再加一个速度控制,能够控制飞机速度,控制框图如图2所示。
通过参考速度的方案能够很好地控制飞机的姿态,但是也有一些问题,例如会带来工作量的增加,因为一个PID 控制器中就至少有三个参数,分别是比例、积分和微分;并且PID 的控制不是特别准确,因为在控制的时候可能由于速度或者角度问题导致速度过快,或者角度偏移过大,导致飞机异常,所以为了飞机正常飞行,需要针对角度和速度进行限制,在限制的时候需要加入一些控制飞机飞行角度和速度的算法,另外,由于旋翼无人机的物理特性表示其系统为非线性系统,从理论上来说可以考虑使用非线性控制算法进行控制。
5 融合图像、航速的无人机自主返航算法设计
在无人机返航中需要用到融合图像和航速的算法进行设计,通过光流法可以预测飞机的速度,然后通过对速度积分来获取飞机的位置,能够获取比较准确的相对位置,虽然获取了位置,但是在飞机飞行过程中肯定会有一些误差,例如漂移导致的飞行误差,所以只根据速度积分获取的信息肯定不准确。可以依靠图片的关键帧来获取路径,通过关键帧来获取肯定能够获取比较准确的位置信息,但是由于照片拍摄的间隔时间可能过长,导致信息不准确,如果降低拍摄间隔,就会导致照片特别多,浪费存储空间。针对这两种方案进行了整合,在去目的地时,根据速度积分进行测算,并且摄像头会进行拍照,将照片进行存储,来分析相对位置;在从目的地返回时,飞机首先根据去程时记录的关键帧到达关键帧附件,然后根据参考图像进行悬停。然后一直重复这个过程到达起始点。
在程序的顶层控制中,采用状态机的控制方法,具体的流程如图3 所示。在定义过程中文中的0 代表去目的地的记录状态,数字1 代表根据速度进行导航的状态,状态2 为无人机基于图像匹配进行悬停的状态。初始时控制程序处于状态0,此时人为遥控无人机或根据事先预定的位置关键点控制无人机前进,如果到达终点则转为状态2,否则持续状态0;在状态2 下不停地与参考图像进行匹配,如果匹配结果非常接近,即旋转角与偏移向量都足够小,则转为状态1,否则持续状态2;在状态1 下不停地用里程计与关键帧之间的参考位移进行比较,如果到达了下一关键帧附近,则转到状态2,否则持续执行状态1。

图2 基于图像和速度的无人机控制图
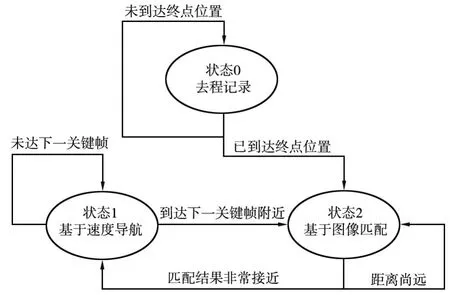
图3 自主返航状态机控制方法
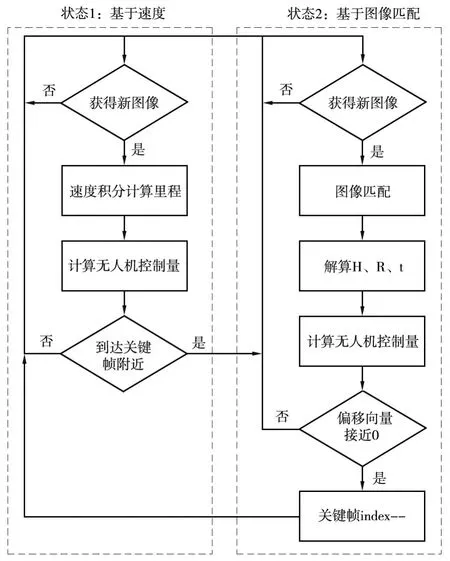
图4 自主返航流程
返航过程中的算法流程如图4 所示,用一个状态机控制器控制无人机在状态1 基于速度导航和状态2 基于图像匹配悬停之间切换。初始时index=n,无人机进入状态2。
6 结束语
首先介绍无人机的基础模型,然后分析具体无人机在姿态控制和返航中需要使用到无人机的硬件设备,并且重点研究飞行中的算法控制。完成飞机具体的姿态控制和飞行轨迹的设定。
