达芬奇机器人手术系统在直肠癌侧方淋巴结清扫中的应用进展
2020-06-01池诏丞程龙伟姜晶
池诏丞 程龙伟 姜晶
直肠癌侧方淋巴结清扫最早由日本学者在20 世纪70 年代开始施行,我国由董新舒等[1-2]在20 世纪80 年代开展,早期的手术均通过开腹完成,研究认为其改善患者生存的作用并不显著,且增加了术后排尿和性功能障碍等并发症的发生率。随着腹腔镜及机器人手术的普及,侧方淋巴结清扫对功能的影响逐渐减少,故在直肠癌手术中的应用价值逐渐得到认可,目前在日本已成为直肠癌手术治疗的一种标准术式,并在世界范围内引起热议。在我国,由周总光等[3]牵头发表了《中国直肠癌侧方淋巴结转移诊疗专家共识(2019 版)》,这对我国直肠癌侧方淋巴结清扫的规范化开展起到了重要的推动作用。其中,达芬奇机器人手术系统因其具有三维高清视野、多自由度的机械臂和操作精准的特点,更适合在狭小的空间内进行手术,因此其在直肠癌侧方淋巴结清扫手术中具有不可或缺的地位,近期的研究也表明机器人手术与开腹及腹腔镜手术相比具有潜在优势。
一、达芬奇机器人手术系统的应用现状及技术特点
2002 年,Weber 等[4]首次报道了达芬奇机器人辅助结肠良性疾病手术;2006 年,Pigazzi 等[5]首次报道了达芬奇机器人直肠癌手术;2009 年6 月,杜晓辉等[6]报道了我国第一例达芬奇机器人低位直肠癌前切除术。经过十余年的不断发展,国内外达芬奇机器人装机不断增加,直肠癌手术报道例数逐年增多,取得了较大的进展。截至到2019 年6月底,全球共装机达芬奇机器人手术系统5 270台,其中,我国大陆截至到2019 年1 月共装机136 台,从2006 年第一台机器人装机以来,中国大陆共完成机器人手术13 万余例,其中,结直肠手术1.3 万余例。
1994 年,美国食品药品监督管理局正式批准的达芬奇机器人系统的前身AESOP 系统用于临床。1996 年更新的ZEUS 系统在纽约为身在法国的患者实施远程胆囊切除术[7]。1999 年,“视觉外科”公司推出了第一代达芬奇系统,此后不断更新换代,2014 年4 月正式推出第四代Xi 系统。在世界范围内,第三代Si 系统应用最为广泛,少数单位开始应用第四代系统。达芬奇机器人手术系统主要包含三个部分:医师操控台、机械臂系统和视频成像平台。与腹腔镜相比,达芬奇机器人手术系统具有以下技术特点[8]:(1)三维高清放大10~15 倍立体图像,手术视野真实清晰;(2)手术器械具有仿真手腕,可在7 个自由度540°方向旋转,手术操作精细灵活;(3)等比缩小术者的大幅度动作,并过滤颤动,使手术操作稳定安全;(4)术者可以远离术区,采取坐姿完成手术,增加术者手术体验;(5)机器人手术系统可减少培训时间并缩短学习曲线,更为节约高效。
二、达芬奇机器人手术系统在直肠癌侧方淋巴结清扫中的应用进展
直肠癌侧方淋巴结清扫是一项高难度的、在争议中不断发展的手术技术[9-11,17]。初期以开放手术为主,其存在手术创伤大、术中出血多、术后对功能影响大的缺点,亦有报道称侧方淋巴结清扫可能不会增加排尿功能及性功能障碍[12-13]。随着手术设备及手术技术的不断改良与进步,腹腔镜和机器人手术逐渐成熟,这些技术在直肠癌侧方淋巴结清扫中也获得了尝试和推广。日本Uyama 等[14]于2001 年首先报道了腹腔镜侧方淋巴结清扫术。腹腔镜侧方淋巴结清扫手术因视野清晰且具有放大效果,其优点明显,如手术切口小、术中出血少、术后炎性反应轻等,可安全用于直肠癌侧方淋巴结清扫[15]。国内外学者也对腹腔镜侧方淋巴结清扫技术进行了详细的阐述[16-19]。当然,腹腔镜手术也存在学习曲线长、手术器械无法弯曲、对助手要求较高的缺点。而达芬奇机器人手术系统的三维手术视野和可旋转的手术器械等优势,可更好地显露并保护盆腔自主神经,更容易在盆腔侧方的深窄空间进行手术操作。因此,越来越多的外科医生开始探索机器人在侧方淋巴结清扫的应用。Ju-A 等[20]于2012 年首先报道了达芬奇机器人侧方淋巴结清术。Kagawa 等[21]为连续50 例低位直肠癌患者实施机器人辅助侧方淋巴结清扫术,其中44 例患者接受双侧淋巴结清扫术,手术中位时间为476 min(320~683 min),侧方淋巴结清扫所需中位时间为165 min(85~257 min),中位失血量为27 mL(5~690 mL)。没有患者中转开腹或腹腔镜手术。手术后中位住院时间为8 d(6~13 d)。Clavien-Dindo III-IV 级并发症仅出现一例(2.0%)。没有患者发生吻合口漏及围手术期死亡。侧方淋巴结检出中位数为19 枚(5~47 枚)。Yamaguchi 等[22]报道了一项单中心、回顾性研究,比较机器人与开腹侧方淋巴结清扫的短期结果。共有173 例患者入组,85 例行机器人手术,88 例行开腹手术。机器人组无中转开腹手术病例,而且保肛率明显高于开腹组(P=0.007)。机器人组的手术时间明显长于开腹组(P=0.007),但手术失血量明显低于开腹组(P<0.001)。机器人组在切口感染、小肠梗阻、吻合口漏和尿潴留发生率上均明显低于开腹组。两组在淋巴结检出率上差异无统计学意义。Yamaguchi 等[23]对机器人侧方淋巴结清扫的长期结果进行回顾性研究。经过精确匹配将患者分为机器人组(n=78)和开腹组(n=78),比较各组间的病理学结果和长期结局。结果发现两组间病理分期及检出淋巴结数目差异无统计学意义。与开腹组相比,机器人组的切缘阳性率有下降趋势(P=0.059)。该研究中位随访时间为54.0 个月,机器人组和开腹组5 年总生存率分别为95.4%和87.8%(P=0.106),5 年无复发生存率分别为79.1%和69.9%(P=0.157),5 年局部无复发生存率分别为98.6%和90.9%(P=0.029)。Kim 等[24]对连续接受机器人或腹腔镜全直肠系膜切除术和侧方淋巴结清扫患者的前瞻性数据进行了回顾性比较研究。共入组85 例患者,50 例患者接受机器人手术,35 例患者进行腹腔镜手术。机器人组10 例(20%),腹腔镜组6 例(17.1%)进行双侧淋巴结清扫。对于单侧淋巴结清扫,机器人组与腹腔镜组手术时间差异无统计学意义(41.0±15.8 minvs.35.3±13.4 min;P=0.146),机器人组术中出血量明显减少(34.6±21.9 mLvs.50.6±23.8 mL;P=0.002)。机器人组2 例(4.0%),腹腔镜组7 例(20.0%)需要留置尿管治疗尿潴留(P=0.029)。机器人组侧方淋巴结平均检出数为6.6(0~25),腹腔镜为组6.4(1~14)。阳性侧方淋巴结转移率组间比较差异无统计学意义(机器人组28.0%vs.腹腔镜组41.2%;P=0.243)。中位随访时间26.3 个月,各组总复发率差异无统计学意义(机器人组30.0%vs.腹腔镜组31.2%;P=0.850)。机器人组3 例(6.0%),机器人组4 例(11.4%)发生局部复发(P=0.653)。由此可见机器人辅助的侧方淋巴结清扫术是安全、有效、可行的,具有良好的长、短期结局。而且有开放手术经验的术者只需要较短的学习曲线即可掌握机器人侧方淋巴结清扫技术[25]。机器人手术系统的荧光成像技术还可以帮助术者更完整地清扫侧方淋巴结[26]。综上所述,机器人侧方淋巴结清扫与开腹及腹腔镜手术相比似乎具有一定优势,但上述研究均为回顾性研究,尚有待于高质量的前瞻性研究数据来证实机器人手术的潜在优越性。
三、达芬奇机器人手术系统直肠癌侧方淋巴结清扫的手术技巧
机器人侧方淋巴结清扫手术过程与腹腔镜及开腹手术相比,其手术技术本身没有本质的区别。与传统腹腔镜手术的主要不同在于机器人专用器械的准备与操作、机器人的准备与对接及Trocar 孔的位置等,这些区别均由机器人手术系统本身的特点所决定,不同的机型其流程及操作方法略有不同,因此在操作机器人之前需要进行严格的操作培训,获得术者或助手的准入资格后方可开展机器人手术。
以第三代达芬奇Si 系统为例,直肠癌手术过程可参照《机器人结直肠癌手术专家共识(2015)》进行操作[27]。随着机器人手术量的增加及经验的积累,我们中心把Trocar 的位置及数量进行调整。其中,镜头孔使用12 mm 普通Trocar 置于脐右上方3~4 cm 处;1 号臂使用机器人专用8 mm Trocar,置于右侧麦氏点,根椐肿瘤位置可以适当调整;2 号臂置于左锁骨中线略高于镜头孔,不常规使用3 号臂。助手孔1 使用12 mm 普通Trocar,置于1 号臂孔垂直线上方,助手孔2 使用5 mm 普通Trocar 位于辅助孔1 内上方。各Trocar孔距离均在8~10 cm,详见图1 及图2。经过上述调整后更有利于肠系肠下血管的游离、253 组淋巴结的清扫,同时可以提高手术的流畅性,减少机器人耗材的使用,降低手术成本。机械臂系统在患者左髂前上棘沿中柱线进入,完成对接。其中1 号臂使用单极热剪或超声刀,2 号臂使用带双极电凝的马里兰抓钳。根据术者习惯在进行双侧方淋巴结清扫时,可以交换1 号臂及2 号臂的手术器械。术中彻底止血是手术的关键,超声刀及双极电凝更有利于无血操作。
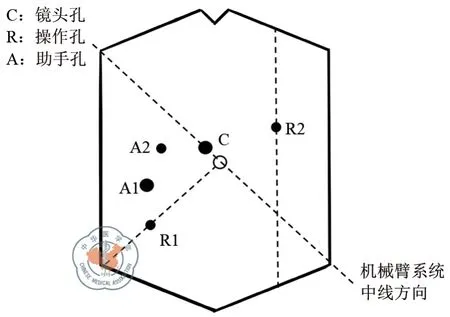
图1 达芬奇机器人直肠癌侧方淋巴清扫Trocar 位置模式图

图2 达芬奇机器人直肠癌侧方淋巴清扫Trocar 位置
在侧方淋巴结清扫过程中以筋膜为导向[28],首先确定清扫分界与分区,内侧界为输尿管腹下神经筋膜,外侧界为侧盆腔壁层筋膜,包括髂外动静脉表面筋膜,髂腰肌筋膜,闭孔内肌筋膜及肛提肌筋膜;以膀胱腹下筋膜为界,分为内外两个区域:内侧区域为腹下神经前筋膜与膀胱腹下筋膜之间的区域,位于盆腔神经丛与髂内血管之间,包括髂内近端血管区的第263P 组、髂内远端血管区的第263D 组淋巴结;外侧区域为位于膀胱腹下筋膜与盆腔壁层筋膜之间的区域,包括骼内血管与闭孔内肌之间的闭孔区淋巴结,即第283 组淋巴结。手术具体过程如下:首先,沿着髂内静脉内侧打开腹膜,游离髂内动脉内侧缘及输尿管,显露出输尿管腹下神经筋膜作为清扫的内侧界,见图3。注意保留输尿管表面腹膜,防止输尿管缺血坏死。其次,沿髂外静脉的内侧缘打开髂外静脉鞘,往内侧深面游离出侧盆壁的壁层腹膜,直至进入髂腰肌及闭孔内肌表面疏松的Toldt 间隙,见图4。显露出髂外动静脉筋膜、髂腰肌筋膜、闭孔内肌筋膜及肛提肌筋膜作为清扫的外侧界。然后,清扫闭孔区淋巴结,牵拉膀胱,沿膀胱腹下筋膜表面游离,到达肛提肌表面,膀胱腹下筋膜和肛提肌表面壁层筋膜交汇处即为闭孔淋巴结内侧缘远端,继续向腹侧分离,到达髂外静脉末梢,在此处夹闭切断闭孔淋巴结远端。由远及近游离闭孔神经至髂内、外静脉分叉处,离断闭孔淋巴结近端,完整清除闭孔淋巴结。最后,清扫髂内淋巴结,在髂内静脉和输尿管之间,由远侧端向近侧端游离清扫髂内淋巴结。然后沿着髂内动脉向远端分离,显露脐动脉闭锁部、膀胱上下动脉及远端阴部内动脉等分支。然后游离出膀胱上下血管。将上述血管脉络化后,离断膀胱下静脉,沿着膀胱上动脉表面继续清扫远端淋巴结,完成髂内淋巴结清扫。至此,侧方淋巴结清扫结束,见图5。将清扫的淋巴结分别置入标本袋,扩大脐部Trocar孔或经预防性回肠造口处取出。常规行结肠肛管吻合或加行预防性回肠袢式造口术。

图3 侧方淋巴结清扫的内侧界
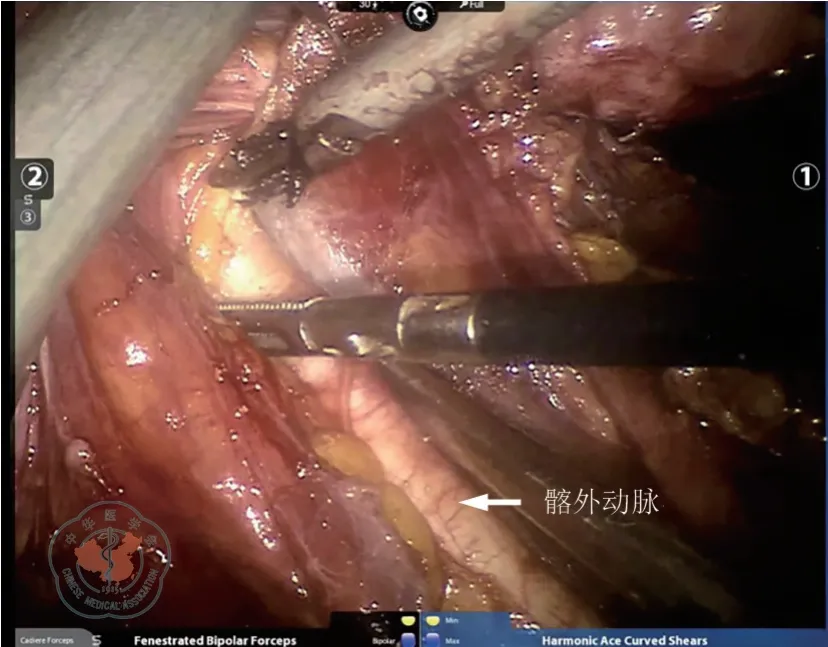
图4 侧方淋巴结清扫的外侧界
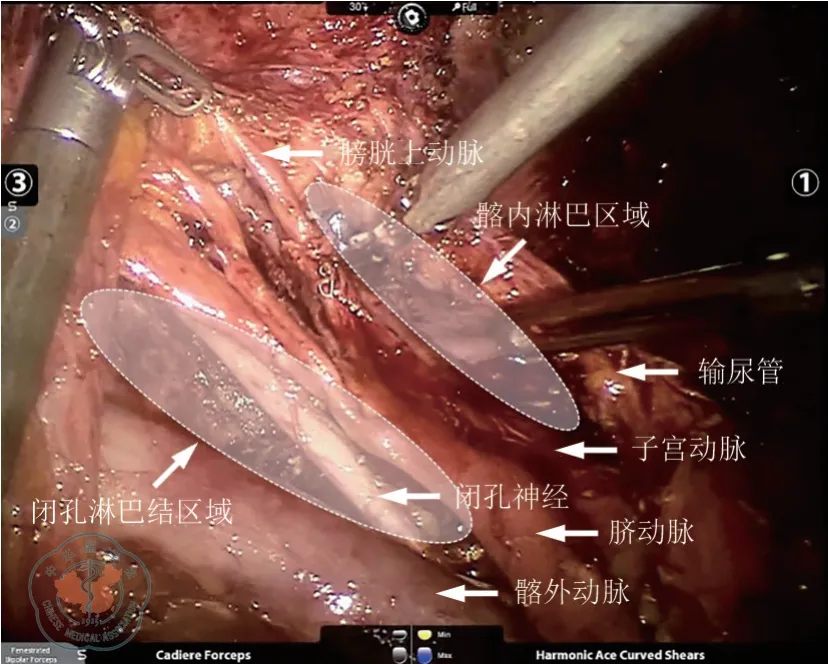
图5 侧方淋巴结清扫效果图
四、结语
综上所述,达芬奇机器人手术系统因其特有的优势在世界范围内得到广泛应用。目前机器人直肠癌侧方淋巴结清扫在短期和长期结局方面似乎具有一定优势,但仍需进一步证据级别较高的前瞻性随机对照研究加以证实。由于侧方淋巴结清扫手术难度较大、时间长,机器人手术系统可能降低该技术的推广难度,并有望成为侧方淋巴结清扫手术的新趋势。
