航速修正标准中的变载试验系数分析
2020-05-31吴思莹
杨 斌,杨 敏,刘 刚,吴思莹
(1. 江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2. 上海外高桥造船有限公司,上海 200135)
0 引 言
2009年,国际海事组织(International Maritime Organization, IMO)发布了《船舶能效设计指数(Energy Efficiency Design Index, EEDI)自愿验证临时导则》,规定航速数据和功率数据需采用国际标准化组织(International Organization of Standardization, ISO)ISO 15016—2002或等同标准的航速修正方法来修正[1]。2015年5月,海洋环境保护委员会(Maritime Environment Protection Committee, MEPC)第68次会议审议通过了ISO 15016—2015航速修正方法,规定该方法适用于2015年9月1日及以后进行EEDI试航验证的船舶,因此深入研究ISO 15016—2015航速修正方法具有重要意义[2]。为保证EEDI验证的可靠性和可操作性,ISO 15016—2015航速修正方法引入了近年来提出的风阻力计算、波浪增阻计算和流修正等方法,以直接功率法为基础,提出变载试验系数和自航因子增量等概念,对试航数据的分析方法进行全面的更新[2]。但是,ISO 15016—2015航速修正方法中关于变载试验和变载试验系数的相关描述较少。由于以前的船模报告不提供变载试验系数,当前使用较广泛的STAIMO航速修正软件一般会采取默认值,且由于定义不同,变载试验系数nξ会取负值,与计算值大小相反。诸如此类,会导致实际操作产生意见分歧和各项修正的问题。
可认为变载试验是自航试验的一个特例,本文基于船模自航试验阐述变载试验的概念和操作步骤,结合船模自航试验和ISO 15016—2015航速修正方法变载试验系数计算方法,提出完善的变载试验系数计算过程和使用方法。该方法能弥补ISO 15016—2015航速修正方法缺少的相关公式和计算步骤,使变载试验系数的计算更加清晰,从而解决由此产生的试航问题。此外,以某矿砂船自航试验为例,验证该计算方法的有效性。
1 自航试验
自航试验方法分为纯粹自航法和强制自航法2种,我国的试验水池一般都采用强制自航法。强制自航法是指在船模自航试验中,螺旋桨的推进力T和强制拖曳力z需共同作用。由于强制拖曳力z可由阻力仪来调节,故船模的航速与拖车速度vm相等且保持不变。船模阻力Rm通过阻力试验得到,螺旋桨转速nm、推力T和扭矩QB由动力仪测得,强制力z由阻力仪测得[3],tm为船模推力减额分数,因此力的平衡式为

一般地,针对某船模的航速vm,需进行5次强制力不同的自航试验(z1、z2、z3、z4和z5),因强制力不同,为使5次自航保持vm不变,要求螺旋桨转速nm、推力T和扭矩QB随之变化。船模水池报告中只体现船舶在实船自航点的数据。图1为船模自航试验布置图。
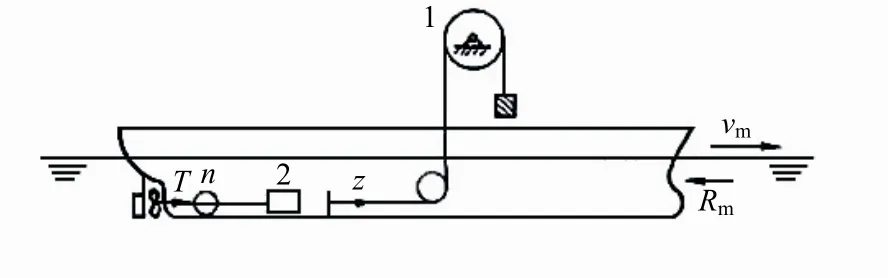
图1 船模自航试验布置图
2 变载试验
对于MARIN水池等少数采用纯粹自航法进行自航试验的水池,需补充进行变载试验。相较于正常的自航试验,变载试验的不同点在于要求在航速恒定的条件下,通过改变4种固定的螺旋桨负荷状态来进行4组自推进试验,这4种固定的螺旋桨负荷状态为

船舶在理想环境下航行时的功率和转速等体现负荷状态的数据属于实船自航点条件数据。船舶在试航时会受到风、浪、流等环境因素的影响,一般情况下,风、浪、流等产生的阻力ΔR为船模阻力试验中获得的实船总阻力Rid的-10%~20%。阻力对船舶航行的影响体现在螺旋桨的负荷状态方面,导致螺旋桨处于轻载或重载状态[4]。因此,变载试验实质上是模拟固定的螺旋桨负荷状态,预估船舶性能的自航试验。
3 变载试验系数
在同一航速状态下,船舶变载试验系数为定值,分别为:反映螺旋桨推进效率随额外阻力线性变化的变载试验系数pξ;螺旋桨轴速度随功率线性变化的变载试验系数nξ;螺旋桨轴速度随速度线性变化的变载试验系数vξ。
3.1 变载试验系数ξp
在ISO 15016—2015航速修正直接功率法中,最终修正的理想条件下的输送功率PDid的计算式为

式(3)中:PDms为测量输送功率;vs为实船航速。
HPLC切换波长法同时测定健脾止泻宁颗粒中盐酸小檗碱和黄芩苷的含量 ……………………………… 黄传俊等(10):1324
虽然在实际航速修正过程中并不能直接得到实船在不同螺旋桨负荷状态下的实际推进效率但可通过船舶性能预报得到理想条件下的推进效率ηDid和变载试验得到的预报推进效率ηDms,从而得到推进效率分数与额外阻力分数之间的关系。因此,引入变载试验系数ξp,该系数是ηDms/ηDid随变化且过(0,1)点的斜率,线性表达式为采用最小二乘法求解式(4),求出斜率pξ。在求出变载试验系数pξ之后,输出功率PDid的修正公式为


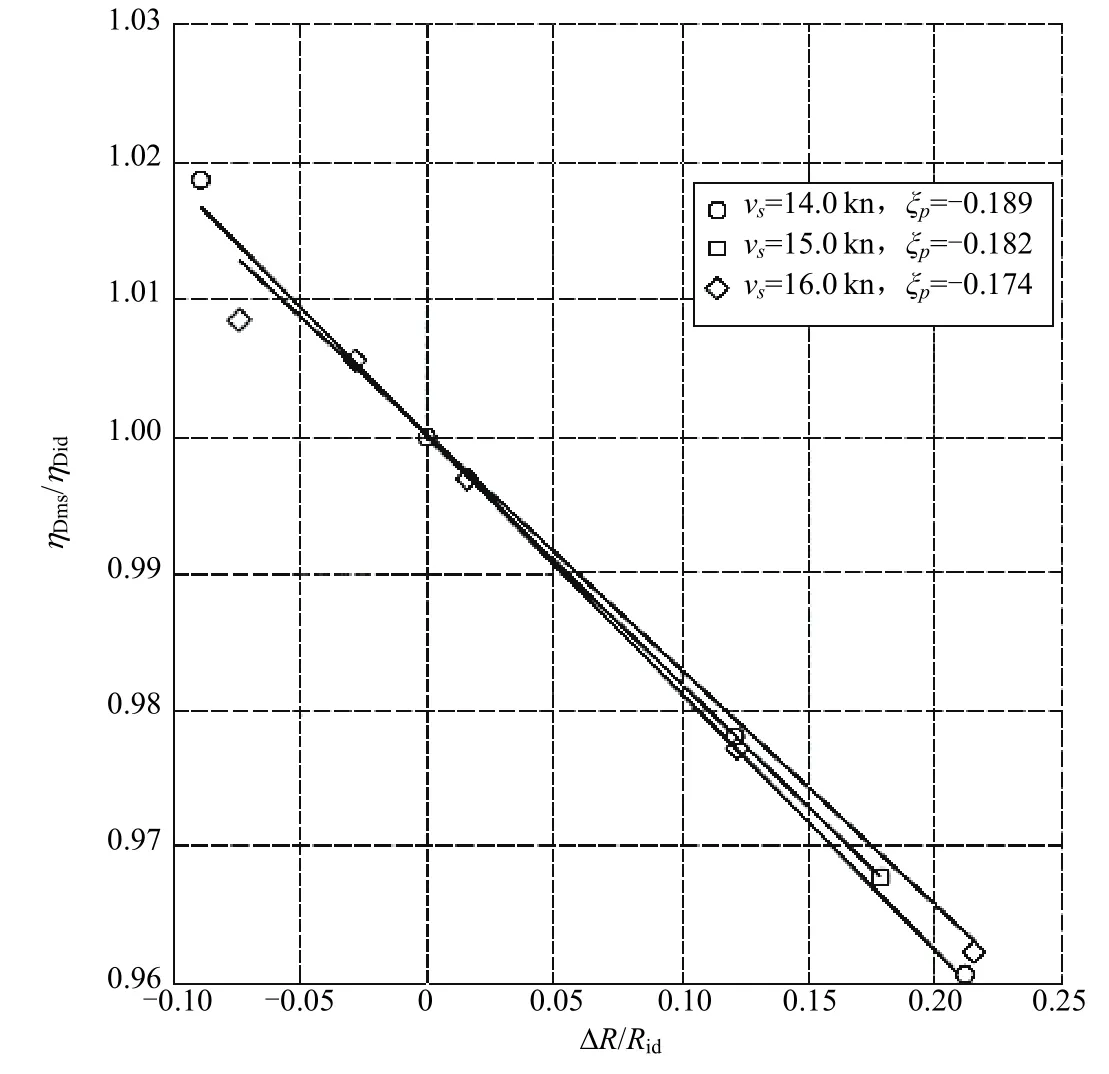
图2 采用最小二乘法拟合的近似曲线
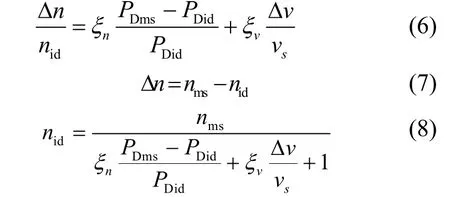
3.2 变载试验系数ξn和ξv
在直接功率法中,修正之后的螺旋桨转速nid与变载系数nξ和vξ之间的关系为
不同于ξp和ξn,变载系数ξv的计算需有一个过渡的过程(见图4)。
通过变载试验得到的转速n随Rid+ΔR线性变化,其中Rid通过阻力试验得到且首先拟合不同航速下的转速n与阻力Rid+ΔR的线性表达式,以已开展变载试验的14kn、15kn和16kn航速为例绘制曲线。可见,所有航速的曲线都相互平行且过点(该点通过正常的自推进试验获得),由此得到13kn和17kn航速的曲线。
假设实船的航速最接近16kn,以16kn航速的(Rid,n)点为基准,作一条垂直线,交于所有航速的曲线,从上向下依次得到交点

图3 使用最小二乘法拟合的近似曲线
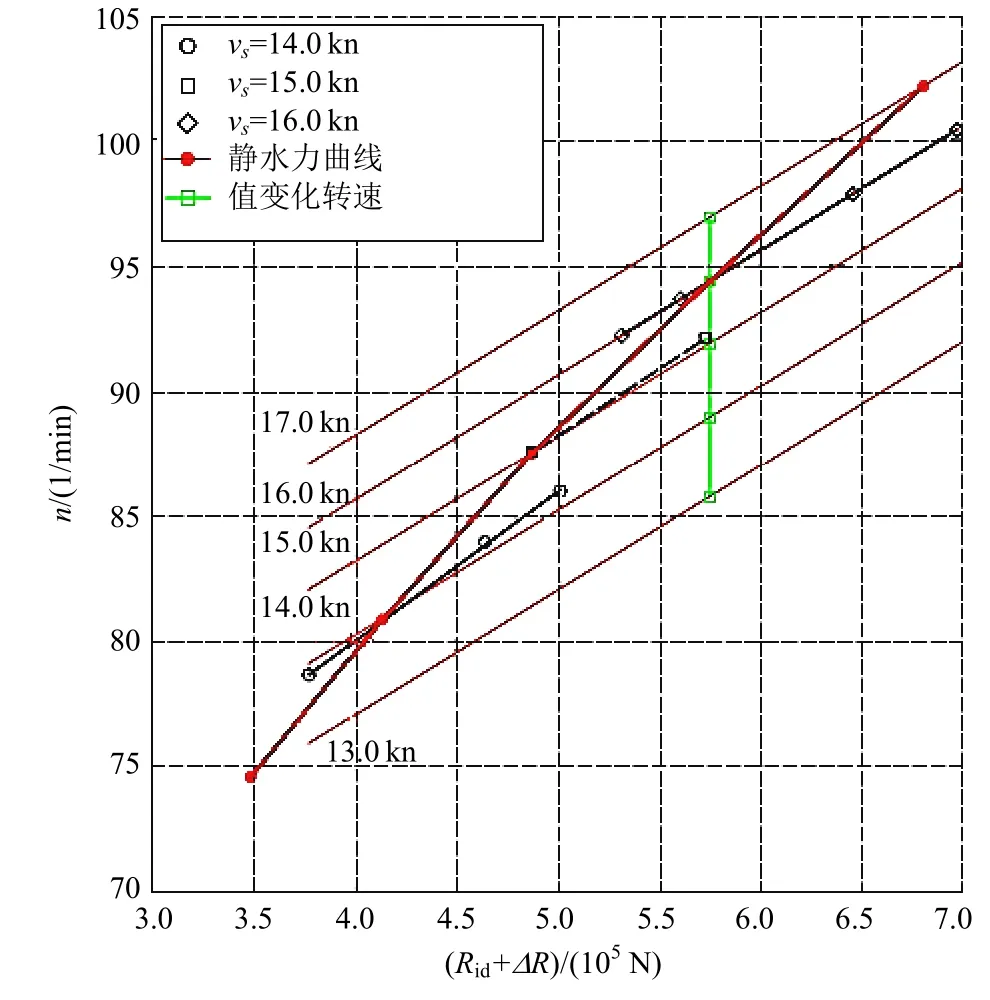
图4 不同航速下螺旋桨转速与负载变化拟合曲线

在螺旋桨转速与航速变化图中做出上述5个点,通过最小二乘法求出斜率vξ。
至此,3个变载系数pξ、vξ和nξ都已求出,用这3个变载系数替代试航中的未知数据,进行航速修正并求得最终的修正功率和修正转速。
4 实例计算
本文基于某40万t矿砂船船模阻力试验、自航试验和变载试验,计算变载试验系数pξ、vξ和nξ,并将其与水池报告数据相对比。考虑到15% sea magin(海上风浪裕度)并结合以往的矿砂船试航航速状况,需测量16kn航速下的变载试验系数pξ、vξ和nξ。
4.1 变载试验系数ξp
表1为通过船模试验实船性能预报得到的理想推进效率ηDid数据和通过变载试验得到的推进效率ηDms数据。

表1 16kn航速船舶推进效率预报
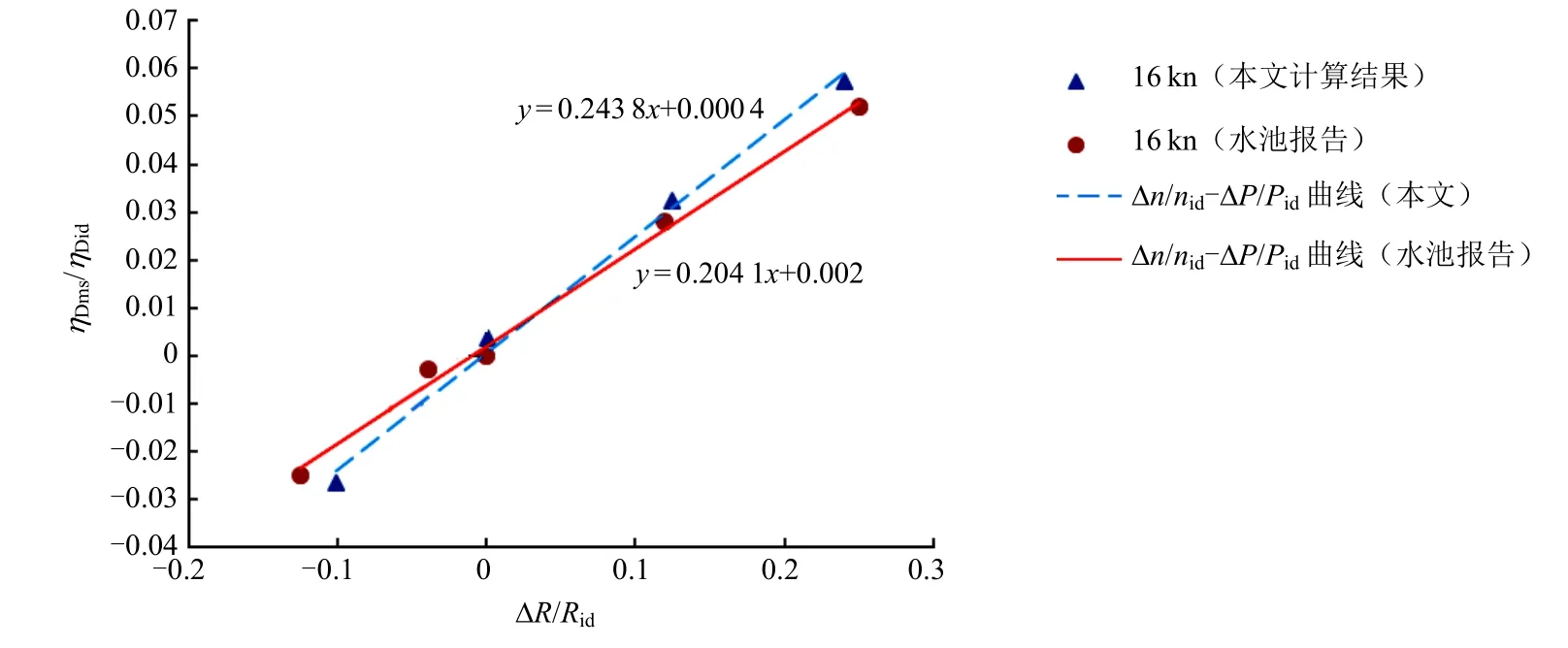
图5 曲线
4.2 变载系数ξn
通过正常的船舶性能预报得到的修正之后的螺旋桨转速nid、功率Pid和通过变载试验测得的螺旋桨转速nms、功率Pms见表2。

表2 16kn航速船舶主机功率预报


图6 曲线
4.3 变载系数ξv
通过阻力试验得到阻力Rid,通过船舶性能预报得到螺旋桨转速n(见表3)。
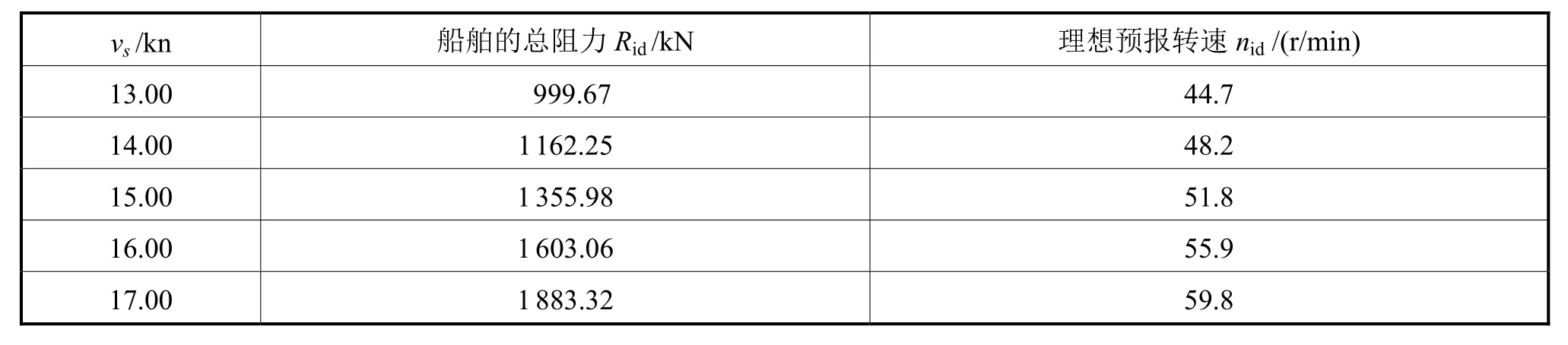
表3 阻力试验和主机功率预报
由表3可知:当航速为16kn时,4种螺旋桨负荷状态下的(Rid+ΔR)分别为1442.8 kN、1603.1 kN、1763.4 kN和1923.7 kN;当航速为13~17kn时,(Rid,n)=[(999.67, 44.7), (1162.25, 48.2), (1355.98, 51.8),(1603.06, 55.9), (1883.32, 59.8)]。
变载试验结果如表2所示,nms=(54.4, 56.1, 57.7, 59.1) r/min。
变载系数vξ的计算步骤如下:
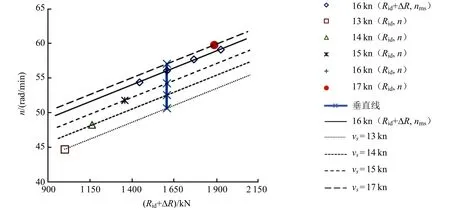
图7 曲线
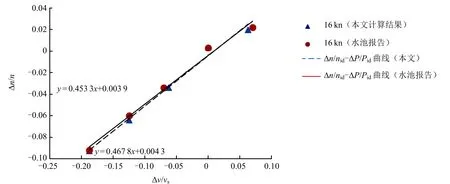
图8 曲线
5 结 语
本文为解决船舶航速修正中确定变载试验系数的问题,深入研究了ISO 15016—2015航速修正方法,主要得出以下结论:
1) 变载试验衍生于自航试验,不同点在于变载试验规定了螺旋桨负荷状态。在变载试验系数pξ、nξ和vξ的数据引用方面,除了必不可少的变载试验数据以外,还需引用阻力试验和自推进试验中的相关数据和参数。
2) 本文介绍了变载试验系数的数据引用和计算方法,并以某40万t矿砂船船模阻力试验、自航试验和变载试验为依据,计算了变载试验系数pξ、nξ和vξ,并将其与水池报告值相对比,验证了所提出计算方法的有效性。