基于YCbCr和Ostu算法的电力热故障区域提取
2020-05-30林亚君林振衡
林亚君,林振衡,陈 越
(莆田学院 机电工程学院,福建 莆田 351100)
0 引言
红外检测具有的非接触性、安全性、便捷性、不停电、不停机等优点,被广泛应用于电力设备运行状态在线监测[1-2]。目前红外检测手段主要是手工检测、分析、诊断、录入,效率较为低下,特别是面对大规模电网,人工诊断工作变得十分繁琐。随着电网智能化的发展,巡检工作模式也发生了变化:通过智能巡检装置(智能巡检机器人、巡检无人机等)拍摄图像,远程传输至控制室进行人工排查处理。为了实时监测,往往需要工作人员精神高度集中地对传输过来的大量图像进行分析[3],不仅极大增大了工作人员的工作负担,还会由于人眼疲劳导致漏检、错检。
随着图像处理技术的发展[4],电力设备故障智能诊断技术应运而生,智能化诊断主要包括电力故障区域提取、故障分类、故障识别等研究领域。作为诊断的首要任务,应用图像处理技术提取电力故障区域一直是一个热门的研究方向[5]。电气设备在出现故障时,由于电流效应,产生的异常温升必然会体现在红外检测图像上。通过分析红外图像中热故障区域的特征,对其进行分割提取,就能发现设备运行中的热故障。目前主要采用的方法有:1)阈值法,文[6]采用最佳阈值策略实现电力故障区域分割;2)区域法,文[7]采用Ostu算法分割出兴趣区域,再运用区域生长算法分割出电力设备故障区域;3)聚类法,文[8]采用K-means聚类算法对电力设备红外图像进行分割,并用马尔可夫模型进一步优化;4)遗传算法,文[9]提出了一种基于Canny算子的PCNN算法实现电力设备红外图像故障区域提取。然而由于电力热故障红外图像存在伪边界、故障区域相对较小等问题,在诊断电力热故障的准确率和区域有效性时往往不够理想。
本文提出了一种融合YCbCr(一种色彩空间)、色差灰度法和Ostu(大津法)阈值分割算法的红外图像提取方法。首先将原始红外图像从RGB(Red Green Blue)空间转换到YCbCr空间,完成初始前景分割;然后结合预分割图像的特征,提出一种红绿色差灰度化方法对图像进行灰度化处理;最后采用Ostu算法寻找最优分割阈值,分割灰度图像实现热故障区域的提取。
1 算法理论
1.1 YCbCr色彩空间
YCbCr是一种基本的色彩空间,是计算机系统中应用最多的成员[10]。YCbCr中,“Y”指亮度分量Y,“Cb”指蓝色色度分量Cb,“Cr”指红色色度分量Cr。红外图像中热故障区域的亮度明显较亮,将红外图像转换至YCbCr色彩空间,可以有效分离亮度信息,克服干扰。YCbCr可以通过RGB线性转换而来,其转换公式如式(1)所示:

式(1)中:R为图像在RGB中的红色分量,G为绿色分量,B为蓝色分量。
YCbCr色彩空间具有亮度信号与色差信号分离的特性,被广泛应用于火焰检测领域[11],故可以实现故障区域(亮黄色,类似于火焰)与非故障区域的初步分割。针对电气设备红外缺陷典型图谱(电流互感器接头发热)分割效果如图1所示。
1.2 图像灰度化方法
图像提取的关键因素是梯度,梯度意味着边缘,能够提供更本质的信息,相比于彩色图像,灰度图像在计算梯度时更有优势。另一方面,彩色图像中每个像素点都是由三个分量组成的,为了提高计算效率,在进行图像分割前往往需要进行灰度化处理[12]。目前常用的灰度化处理方法有:1)分量法;2)最大值法;3)平均值法;4)加权平均法。另外,文[13]基于处理的图像色彩特征,提出一种红蓝色差灰度化方法。对于热故障区域提取问题,上述方法处理效果均不太理想。结合红外图像转换至YCbCr色彩空间后的图像特征,得出故障区域与非故障区域的红绿色差比较明显。为此本文提出一种红绿色差归一化的灰度化方法。
假设在色彩空间转换后的图像中故障区域的像素值(Rf,Gf,Bf),非故障及背景区域的像素值(Rb,Gb,Bb)。通过分析比对大量的两类像素点发现,故障区域Rf≥Gf,其余区域Rb≤Gb。根据这些特点,计算全幅图像的红绿色差grg,计算公式如式(2):

鉴于Grg取值范围为[-1,1],根据式(3)进行归一化:

图1 YCbCr分割结果

其中grg′取值范围为[0,1]。各像素点的灰度值grg″表示为:

经过灰度化后,故障区域区分更加明显,为下一步的图像分割做好准备。
1.3 Ostu算法
Ostu是一种自适应的阈值确定方法[14],该算法是按图像的灰度特性,遍历每个灰度级,按阈值将图像分为背景和目标两个部分。假设一幅图像有L个灰度级,其中灰度级为i的像素点有ai个,于是整幅图像的像素总数为:,各灰度值的概率。若当前选择的阈值为k(0<k<L-1),那么图像将被将被分成Cb=0…k( )和两类,像素点被分到Cb和Co类的概率分别是:

Cb和Co的像素平均灰度值分别为:

整个图像的平均灰度值为:

类间方差为:

d k()越大,说明构成图像的两个部分的差别越大,当d k()取得最大值时,k值为最佳阈值。得到k值后,灰度图按该阈值分割成两个部分,提取出热故障区域。
2 算法流程
电力系统的热故障有内部故障和外部故障,不管是何种故障,由于故障区域的温升都能在红外图像上显现出亮黄色。首先将红外图像转换至YCbCr色彩空间,能够有效地将亮度信息分离出来;转换后的图像前景区域以红色为主,背景区域以绿色为主,故采用红绿色差法对图像灰度化;最后采用Ostu分割灰度图像,实现热故障区域的提取,算法整体流程如图2所示,图像的变换过程如图3所示。

图2 本文算法流程图
3 实验结果
为了验证本文提出的电力热故障区域提取方法的实际效果,下文基于Matlab平台对几种不同类型的电力热故障进行测试。并与色差灰度法+Ostu算法(结合红外图像原图,此处采用蓝绿色差法)、Ostu算法和K-means算法进行对比。图4给出了三幅电气设备红外缺陷典型图谱,测试结果及对比结果如图5~图8所示。其中图4(a)为电流互感器发热的故障红外图像,图4(b)为断路器支柱发热(污秽)的故障红外图像,图4(c)为交联电缆终端场强不均匀的故障红外图像。

图3 图像变换过程

图4 原始红外图像
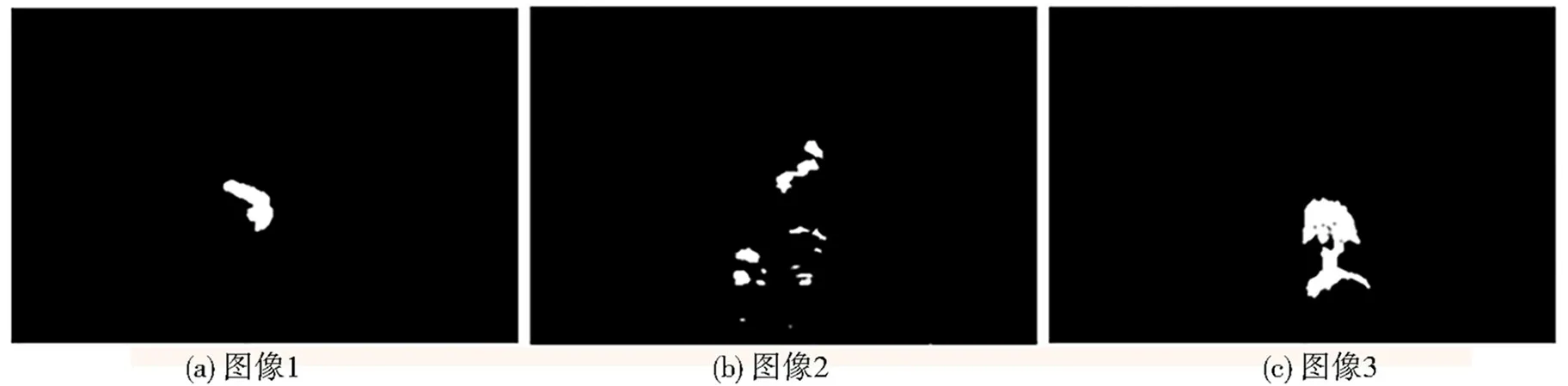
图5 本文算法
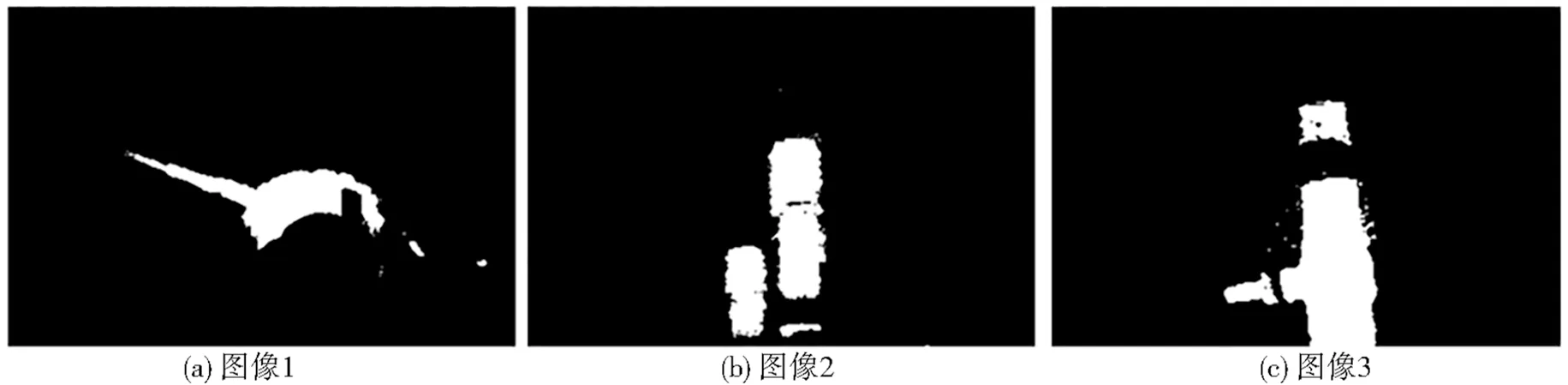
图6 Ostu算法

图7 色差灰度法+Ostu

图8 K-means算法
将图5与图6、图7、图8进行比较,可以看出,由于三个原始红外图像中故障区域很小,而且故障区域较为模糊,用现成的方法分割的效果不太理想:
(1)Ostu算法综合考虑了整幅图像,故障区域所占比例太小,故障区域边界模糊,导致阈值选择偏向背景,将一部分非故障区误分割进来,过度分割。
(2)Ostu结合了色差灰度法后,虽然图像质量有所改善,但效果仍然不太理想。
(3)K-means算法将图像分成两类,得到的分割结果基本上把目标区域融合进背景,极大地增大了后续处理的工作量。
(4)采用本文提出的算法,能够将故障区域完整、准确地提取出来。通过色彩空间转换,使得目标区域与背景区域的色彩对比更加明显,实现初步分割。结合初步分割结果,利用红绿色差法能够更合理地灰度化图像。最后采用Ostu算法确定灰度图像自适应分割阈值,完成图像分割。以上三个过程能够逐步扩大目标区域与背景区域的差距,使得采用本文算法作分割时不受目标区域小、边界模糊的限制,具有良好的热故障区域提取性能。
4 结束语
为了提高电力热故障区域提取的精确性,本文提出了一种融合YCbCr、红绿色差灰度化和Ostu算法的电力热故障区域提取方法。该算法的思路:电气热故障区域的亮度明显高于正常区域,故先将红外图像转换至YCbCr色彩空间,对图像进行初步前景分割;结合初步分割后的图像特征,提出一种红绿色差法对图像进行灰度化;最后采用Ostu算法完成热故障区域提取。
实验结果表明:该算法能够在目标范围很小的红外图像中提取出热故障区域,所得提取结果在保证准确性的前提下,极大降低了过度分割率,为后续的故障识别奠定了良好的基础。
