基于车车协同的交叉口主动防碰撞控制策略
2020-05-28李欢武文佳武书辰郭渊
李欢 武文佳 武书辰 郭渊
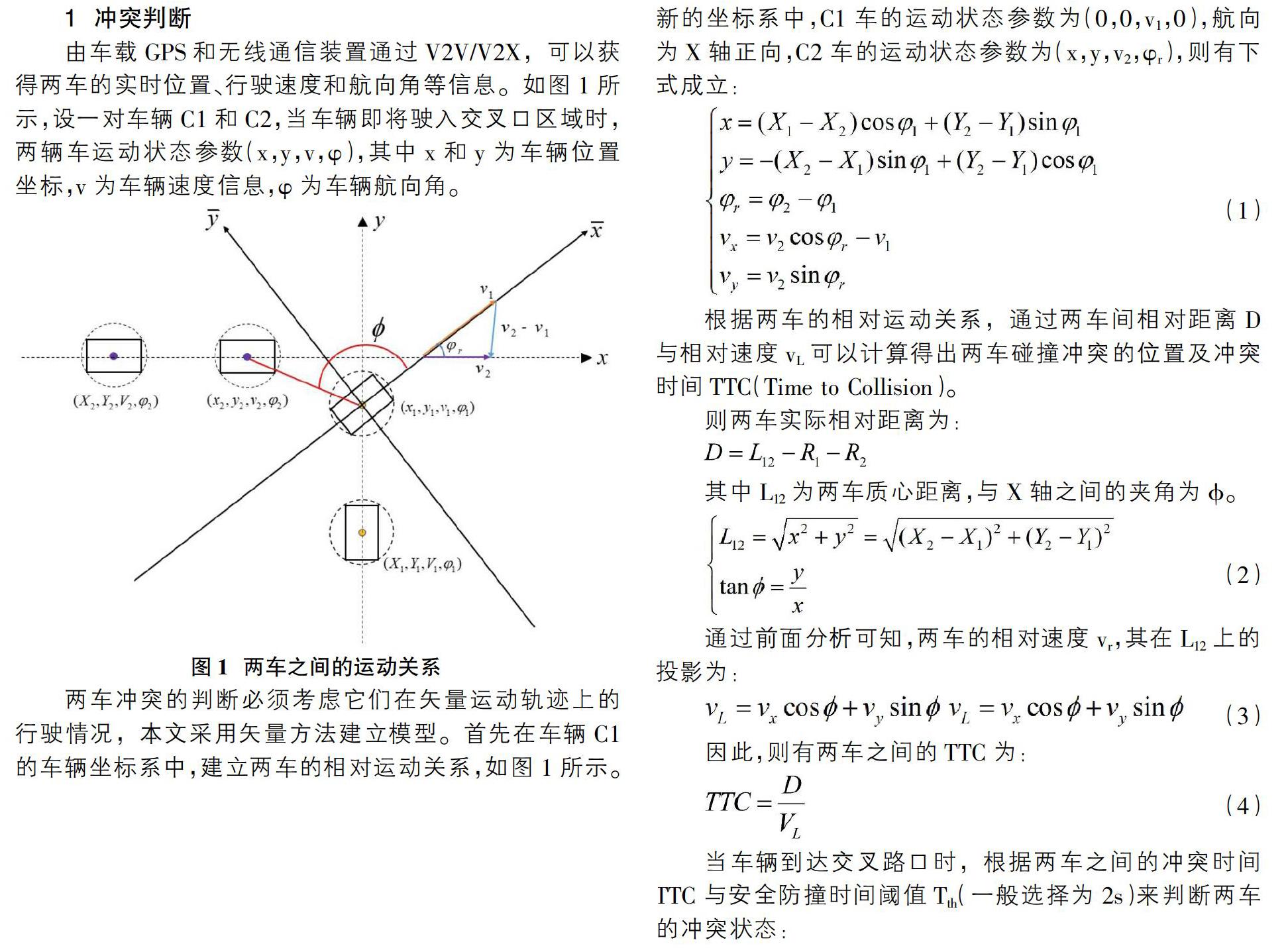
摘要:本文利用车车协同技术,对无信号交叉口车辆冲突消解进行了理论分析,通过矢量图来建立两车碰撞消解的临界情形,得到不同的通行权分配对应的车速调整模型。在冲突消解策略满足安全通过的前提下,还需要考虑速度因素和时间因素,建立交叉口优化控制的目标函数,得到最优交叉口最优控制方案。最后联合Prescan和Matlab/Simlink对交叉口动态交通环境进行仿真,结果表明模型可有效避免碰撞危险,同时提高交叉口通行效率,对于交叉口多车协作算法的发展具有一定的参考意义。
Abstract: in this paper, the collision resolution at intersections is theoretically analyzed based on the vehicle-road cooperation technology. The conflict resolution model is established by vector graph of two vehicle moving trajectory, and the speed change strategy is obtained. Besides the conflict resolution strategy meets safety factor, it is necessary to consider the speed and time factors, so the objective function at intersection is established, and the optimal control strategy is obtained. Finally, Prescan and Matlab/Simlink are combined to simulate the dynamic traffic environment at intersections. The results show that the model can effectively avoid collision hazards and improve the crossing efficiencyat intersections. It can provide a certain reference for the development of multi-vehicle cooperation algorithm at intersections.
關键词:车速引导;冲突消解;无信号交叉口;协调控制模型;V2V/V2X
Key words: vehicle speed change;conflict resolution;unsignalized intersection;coordination control model;V2V/V2X
中图分类号:U491 文献标识码:A 文章编号:1006-4311(2020)12-0238-04
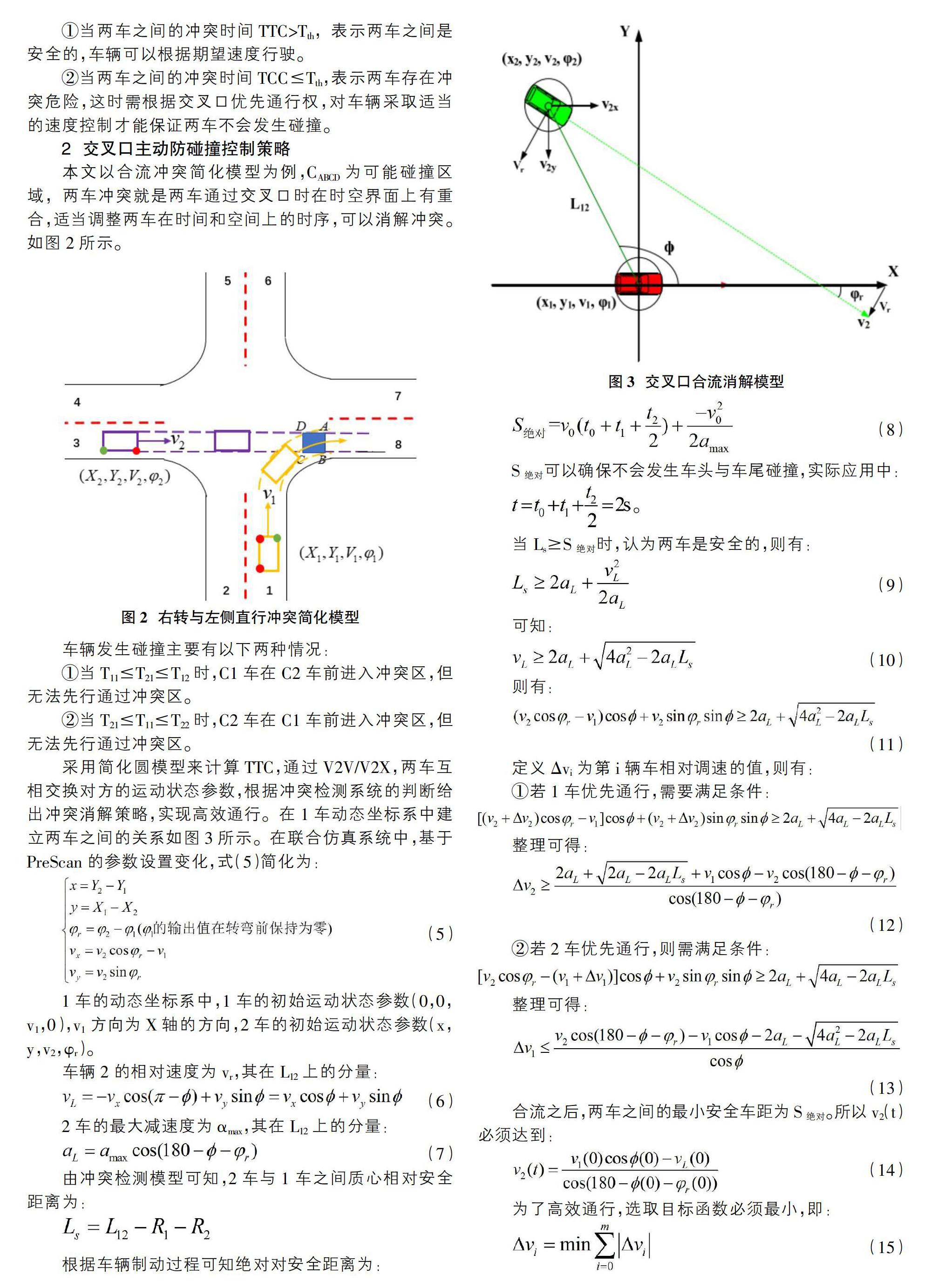
3 仿真实验与结果
为验证交叉口车车协调控制策略,系统采用PreScan8.3.0和Matlab-Simulink进行联合仿真。无信号交叉口目标车C1由南往北行驶,初始状态为位置坐标(x10=60,y10=-10),初始速度v10=5m/s;另外一辆主车C2由西往东行驶,C2初始位置坐标(x10=-40,y10=60),初始速度v20=5m/s,期望速度为15m/s。
图4和图5给出了主动车调速前和调速后的场景,以及相应运动轨迹。可以看到若车辆以原定的速度行驶,两车发生碰撞,若主动车通过V2V/V2X交互接受目标车的运动状态参数,在冲突判断模型系统预判会发生合流冲突的情况下,通过算法计算执行调速策略,则车车冲突可以消解。
如图6所示,为冲突检测算法所计算的冲突时间TTC在目标车调速前和调速后的波形图,通过冲突检测算法计算,可知在t=17.25s,两车在十字交叉口相撞。
图7给出了主动车调速前后,目标车和主动车的质心直线距离,由此可以看出主动车根据交叉口冲突消解策略调速后可以消解两车十字交叉口合流冲突。图8给出了主动车调速前后主动车自身车速的变化情况,在主动车通过V2V/V2X交互接收到主动车的运动状态参数,经过计算给出调速策略后,主动车的速度在10s内由初始速度5m/s下降为约3.5m/s,并在避免发生冲突且使驾驶员感到舒适的情况下,在调速之后合理提速,保证了通行的高效性。
4 结论
①本文对无信号交叉口两车冲突消解进行了理论分析,指出两车冲突是两车在通过交叉口时在时间和空间上彼此之间有叠加的部分,若能适当调节车辆进入交叉口的时间,则会有效避免两车碰撞事故的发生,选择了以两车的相对距离和冲突时间判断两车的冲突情况。
②本文将车辆简化为圆模型,通过矢量图来建立两车碰撞消解的临界情形,得到车速调整模型,不同的通行权分配对应不同的速度引导策略。
③在冲突消解策略满足安全通过的前提下,还需要考虑速度因素和时间因素。本文以速度和时间收益为目标函数完成交叉口控制优化,得到最优通行权的分配信息及车速调整信息。最后通过PreScan8.3.0和Matlab-Simulink进行联合仿真,结果表明模型可有效避免碰撞危险,同时提高交叉口通行效率,避免了车辆因停车导致的尾气排放和功耗损失,大大提高了其环境效益和经济效益。对于今后交叉口多车协作算法的发展具有一定的参考意义。
参考文献:
[1]薛春铭,谭国真,等.基于博弈论的人类驾驶与无人驾驶协作换道模型[J].计算机工程,2017,43(12):261-266.
[2]高书涛.基于车路协同的交叉口车辆通行方法研究[D].吉林大学,2017.
[3]陈思曼,孟宪实,马钧.匝道口智能车合流避撞模型及仿真研究[J].农业装备与车辆工程,2016,54(2):44-50.