数字指示轨道衡GUM法不确定度的评定
2020-05-27安爱民


摘 要:针对数字指示轨道衡计量检定的量值准确性问题,分析了不确定度评定中GUM法和MCM法的适用性,分析研究了数字指示轨道衡的测量原理、检定方法,建立了数字指示轨道衡的测量数学模型,采用GUM法对数字指示轨道衡进行了测量不确定度评定,为完善轨道衡量值溯源及传递体系提供了技术依据。结果表明,基于GUM法的不确定度主要来源于轨道衡示值和上级计量标准器带来的不确定度,使用我国轨道衡检衡车满足数字指示轨道衡的计量性能要求。
关键词:计量学;GUM;轨道衡;不确定度
DOI:10.15938/j.jhust.2020.06.024
中图分类号: TB932
文献标志码: A
文章编号: 1007-2683(2020)06-0165-06
Uncertainty Evaluation of GUM Method for the
Digital Indicating Rail-weighbridges
AN Ai-min
(China Academy of Railway Sciences Corporation Limited Standards & Metrology Research Institute, Beijing 100081, China)
Abstract:Aiming at the problem of quantitative accuracy for the verification of digital indicating rail-weighbridges, this paper analyzes the applicability of GUM method and MCM method in uncertainty evaluation, analyzes and researches the measurement principle and verification method of digital indicating rail-weighbridges. The measuring mathematical model for indicating rail-weighbridges was established and uncertainty of indicating rail-weighbridges was evaluated by GUM. It provides a technical basis for perfecting the traceability and transfer system of rail-weighbridges value. Results show that the uncertainty based on GUM method mainly comes from the uncertainty caused by rail-weighbridges indicator and superior measurement standard. Thus the metrological requirements of the digital indicating rail-weighbridges can be met by using the Chinese test vehicle method for rail-weighbridges.
Keywords:metrology; guide to the expression of uncertainty in measurement; rail-weighbridges; uncertainty
0 引 言
数字指示轨道衡(也称为“静态电子轨道衡”)是在铁路线上使用的装有电子装置具有数字指示功能,用于称量静止状态铁路货车的大型衡器,属于静态称量轨道衡的一种,是列入国家强制检定目录的计量器具,也可作为自动轨道衡的控制衡器[1-2],在铁路、煤炭、冶金、电力、石化等行业应用广泛,其量值准确与否事关企业的经济效益、社会效益,对于社会经济发展和铁路运输安全具有重要意义[3]。国家计量检定规程JJG 781-2019《数字指示轨道衡》[4]已于2019年12月31日发布,2020年3月31日实施,其中规定了使用轨道衡检衡车对数字指示轨道衡的检定方法,其检定是我国轨道衡量值溯源及传递体系重要的组成部分。伴随我国轨道衡技术的发展,数字指示轨道衡测量不确定度的评定是轨道衡计量工作者关心的问题。郝飚、仝其恩、冯诚[5-7]等分别于2003年、2006年、2007年对数字指示轨道衡示值误差、称量检定等方面进行了不确定度分析评定。上述研究工作仅对数字指示轨道衡测量不确定度进行了评定,不确定度分析不够详尽且未按照新的评定方法。据此,本文对JJF 1059.1-2012《测量不确定度的评定与表示》[8]中的GUM法和JJF 1059.2-2012《用蒙特卡洛法评定测量不确定度》[9]中的MCM法适应性进行分析,采用测量不确定度评定GUM法,对数字指示轨道衡测量不确定度进行全面综合的分析及评定,为我国数字指示轨道衡的检定提供了技术支撑。
1 不确定度评定方法分析
1.1 GUM法
GUM法(guide to the expression of uncertainty in measurement)是通过不确定度传播率计算合成标准不确定度,从而得到被测量估计值的测量不确定度评定方法[10]。当被测量Y由N个其他量X1,X2,…,XN通过线性测量函数f确定时,被测量的估计值y为:y=f(x1,x2,…,xN)[11]。被测量的估计值y的合成标准不確定度uc(y)为:
uc(y)=∑Ni=1fxi2u2(xi)+2∑N-1i=1∑Nj=i+1fxifxjr(xi,xj)u(xi)u(xj)(1)
式中:y为被测量Y的估计值;又称输出量的估计值;xi为输入量Xi的估计值,又称第i个输入量的估计值;fxi为被测量Y与有关的输入量Xi之间的函数对于输入量Xi的偏导数,称灵敏系数,灵敏系数通常是对测量函数f在Xi=xj处取偏导数得到,也可用ci表示。灵敏系数是一个有符号和单位的量值,它表明了输入量xi的不确定度u(xi)影响被测量估计值的不确定度uc(y)的灵敏程度;u(xi)为输入量xi的标准不确定度;r(xi,xj)为输入量xi与xj的相关系数;u(xi,xj)为输入量xi与xj的协方差。式(1)称为不确定度传播率,其评定步骤为
1)分析不确定度来源和建立测量模型Y=f(X1,X2,…,xN) ;
2)评定标准不确定度:计算灵敏系數ci,评定测量模型中的各输入量的标准不确定度u(xi),给出与各输入量相对应的输出量y的不确定度分量ui;
3)计算合成标准不确定度uC;
4)确定k或者kp计算扩展不确定度U或Up。
1.2 MCM法
MCM法(monte Carlo method,即蒙特卡洛法)是采用概率分布传播的方法,通过对输入量Xi的概率密度函数(PDF)离散抽样,由测量模型传播输入量的分布,计算获得输出量Y的概率密度函数(PDF)的离散抽样值,进而由输出量的离散分布数值获取输出量的最佳估计值、标准不确定度和包含区间[12-13]。该最佳估计值、标准不确定度和包含区间的可信程度随抽样数的增加而提高。
MCM法通过MCM输入、传播、输出3个步骤实现概率分布的传播和不确定度的评定。MCM输入包括以下步骤:
1)定义输出量Y,即被测量;
2)确定与Y有关的输入量X1,X2,…,XN;
3)建立Y与X1,X2,…,XN之间的测量模型
Y=f(X1,X2,…,xN);
4)利用可获得的信息为Xi设定概率密度函数;
5)选择蒙特卡洛试验样本量的数M,即蒙特卡洛试验次数及测量模型计算的次数。M至少应大于1/(1-p)的104倍。M=106通常会为输出量提供p为95%的包含区间。
MCM传播包括从输入量Xi的概率密度函数抽取M个样本值xir,下标i为输入量数i=1,…,N,r为样本数r=1,…,M;对每个样本值(X1r,X2r,…,XNr),计算相应的模型值,
yr=f(x1r,x2r,…,xNr),r=1,…,M。
MCM输出时,将M个模型值按严格递增次序排列,由这些排序的模型值得到输出量Y的分布函数的离散数据,由这些离散数据计算输出量Y的估计值y及y的标准不确定度u(y)。
1.3 GUM法和MCM法的比较分析
GUM法和MCM法是两种评定不确定度的方法,两者有一定的区别。GUM法主要适用于对输入量进行A类或B类评定得到输入量的标准不确定度,计算灵敏系数,得到输出量的标准不确定度分量,通过不确定度传播律,计算输出量的合成标准不确定度,从而得到扩展不确定度和包含区间。使用GUM法评定时计算量小,评定时不用计算机进行计算。MCM法主要适用于根据输入量的有关信息设定每个输入量的概率密度函数,对该函数进行离散抽样,得到一系列离散抽样值,通过测量模型,计算得到输出量的概率密度函数离散值,由此获得输出量的最佳估计值、标准不确定度和包含区间。使用MCM法评定时要进行大量的计算,通常试验次数在106左右,必须使用计算机软件进行计算。根据两种方法的区别,本文的数字指示轨道衡测量方法通过对输入量进行A类或B类评定得到输入量的标准不确定度,计算灵敏系数,从而得到输出量的标准不确定度分量,计算量小,因此采用GUM法进行不确定度评定。
2 数字指示轨道衡测量不确定度评定
2.1 数字指示轨道衡测量原理
数字指示轨道衡的测量对象为铁路四轴货车,其称量范围从铁路车辆的空车自重到载重车辆的总重。目前铁路车辆单轴承载能力为25t,四轴货运车辆总重为100t。称量时将被称量的铁路车辆停于轨道衡承载器上,称量过程可分为加载过程、称重计量过程、卸载过程3个阶段[14-15]。通过研究发现,在加载过程中被检测车辆从秤台的一侧运行到秤台上,此时支撑承重梁的各个传感器所承受的压力不断变化;当被检测车辆已完全处于秤台之上且保持相对静止状态时,称重传感器输出值相对平稳,是确认车辆重量的最佳时机,其数据变化幅度很小,一般为一个分度值的变化;当称重计量过程结束后,车辆离开轨道衡秤台的过程称为卸载过程。称重指示器将称重传感器输出的车辆载荷信号进行处理,转换为质量值,并显示出称量结果。数字指示轨道衡测量过程示意图如图1所示。
图1中,用于称重计量的称重传感器作用是将力学信号转换成电信号,并利用电子及计算机技术对该信号进行处理、检测、运算。数字指示轨道衡的力学模型如图2所示。
2.2 数字指示轨道衡检定方法
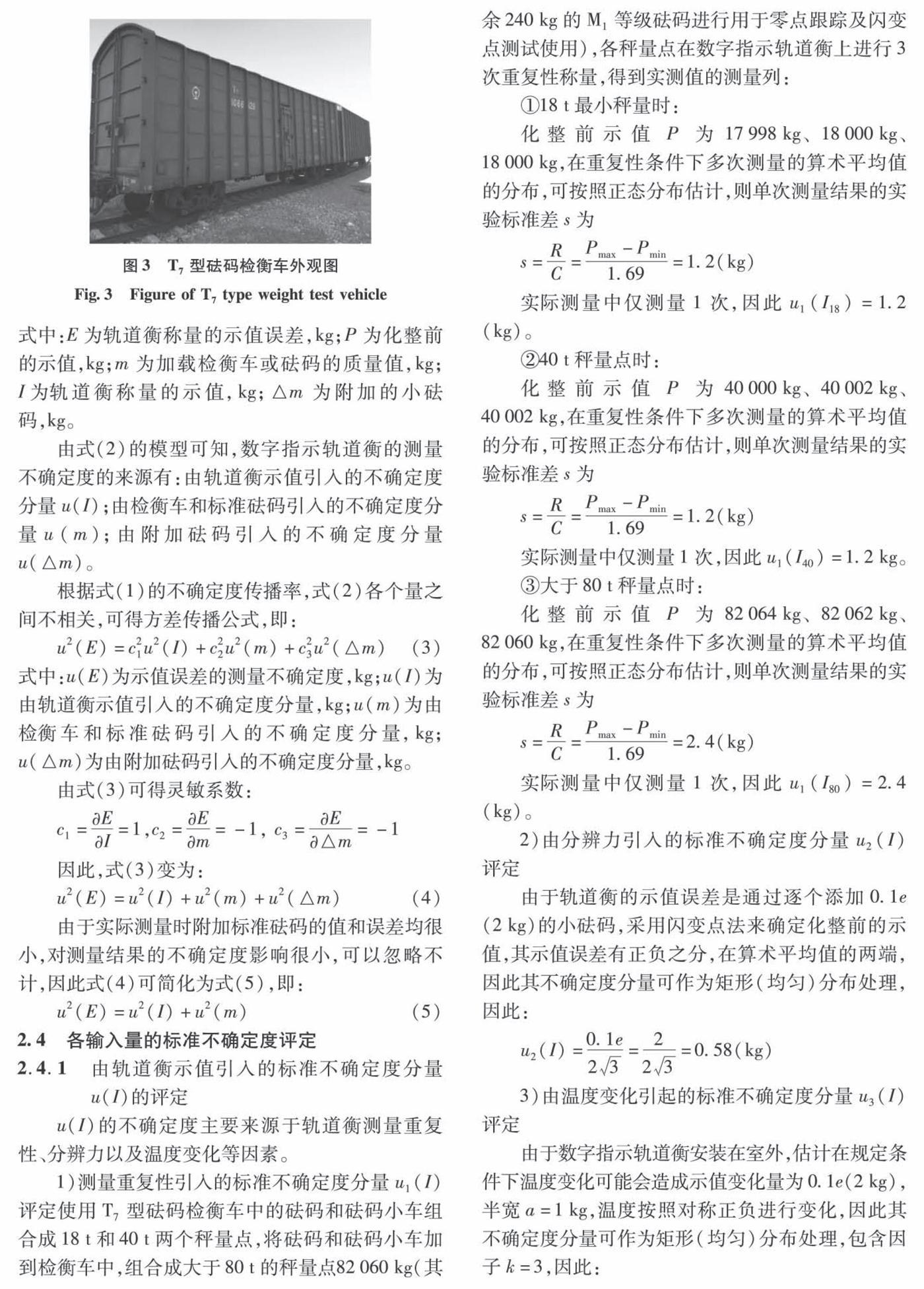
使用符合JJG 567-2012《轨道衡检衡车》[16]的T7型砝码检衡车对数字指示轨道衡进行检定,其整车外观如图3所示,该型车为轨道衡检衡车[17]中的一种,为铁路特种车,轴重21t,符合国际法制计量组织(OIML)R76-1:2006[18]中滚动载荷的要求。
根据铁路货车实际使用的测量范围,研究使用检衡车的整车对大于80t秤量点进行检定,使用T7型砝码检衡车中的砝码小车和砝码组合对18t和40t秤量点进行相关项目的检定,检衡车使用我国标准轨道衡进行检定[19],其中的砝码小车和砝码溯源至国家质量基准,保证了计量的准确性。T7型砝码检衡车的外观如图4所示,砝码检衡车中有符合JJG 99-2006《砝码》[20]M1等级和M12等级砝码若干,数字指示轨道衡为GCS-100型,检定分度值:e=d=20kg,准确度等级:中准确度级Ⅲ○级。
2.3 数学模型建立及不确定度来源分析
在对数字指示轨道衡进行检定时,依据JJG 781-2019《数字指示轨道衡》,利用我国研制的T7型砝码检衡车组合成一定质量的载荷加载到轨道衡的承载上,通过找闪变点方法确定其化整前的示值P,计算P与m之差,即为轨道衡示值误差E。因此,测量的模型为
E=P-m=I-m+0.5e-△m(2)
式中:E为轨道衡称量的示值误差,kg;P为化整前的示值,kg;m为加载检衡车或砝码的质量值,kg;I为轨道衡称量的示值,kg;△m为附加的小砝码,kg。
由式(2)的模型可知,数字指示轨道衡的测量不确定度的来源有:由轨道衡示值引入的不确定度分量u(I);由检衡车和标准砝码引入的不确定度分量u(m);由附加砝码引入的不确定度分量u(△m)。
根据式(1)的不确定度传播率,式(2)各个量之间不相关,可得方差傳播公式,即:
u2(E)=c21u2(I)+c22u2(m)+c23u2(△m)(3)
式中:u(E)为示值误差的测量不确定度,kg;u(I)为由轨道衡示值引入的不确定度分量,kg;u(m)为由检衡车和标准砝码引入的不确定度分量,kg;u(△m)为由附加砝码引入的不确定度分量,kg。
由式(3)可得灵敏系数:
c1=EI=1,c2=Em=-1, c3=E△m=-1
因此,式(3)变为:
u2(E)=u2(I)+u2(m)+u2(△m)(4)
由于实际测量时附加标准砝码的值和误差均很小,对测量结果的不确定度影响很小,可以忽略不计,因此式(4)可简化为式(5),即:
u2(E)=u2(I)+u2(m)(5)
2.4 各输入量的标准不确定度评定
2.4.1 由轨道衡示值引入的标准不确定度分量u(I)的评定
u(I)的不确定度主要来源于轨道衡测量重复性、分辨力以及温度变化等因素。
1)测量重复性引入的标准不确定度分量u1(I)评定使用T7型砝码检衡车中的砝码和砝码小车组合成18t和40t两个秤量点,将砝码和砝码小车加到检衡车中,组合成大于80t的秤量点82060kg(其余240kg的M1等级砝码进行用于零点跟踪及闪变点测试使用),各秤量点在数字指示轨道衡上进行3次重复性称量,得到实测值的测量列:
①18t最小秤量时:
化整前示值P为17998kg、18000kg、18000kg,在重复性条件下多次测量的算术平均值的分布,可按照正态分布估计,则单次测量结果的实验标准差s为
s=RC=Pmax-Pmin1.69=1.2(kg)
实际测量中仅测量1次,因此u1(I18)=1.2(kg)。
②40t秤量点时:
化整前示值P为40000kg、40002kg、40002kg,在重复性条件下多次测量的算术平均值的分布,可按照正态分布估计,则单次测量结果的实验标准差s为
s=RC=Pmax-Pmin1.69=1.2(kg)
实际测量中仅测量1次,因此u1(I40)=1.2kg。
③大于80t秤量点时:
化整前示值P为82064kg、82062kg、82060kg,在重复性条件下多次测量的算术平均值的分布,可按照正态分布估计,则单次测量结果的实验标准差s为
s=RC=Pmax-Pmin1.69=2.4(kg)
实际测量中仅测量1次,因此u1(I80)=2.4(kg)。
2)由分辨力引入的标准不确定度分量u2(I)评定
由于轨道衡的示值误差是通过逐个添加0.1e(2kg)的小砝码,采用闪变点法来确定化整前的示值,其示值误差有正负之分,在算术平均值的两端,因此其不确定度分量可作为矩形(均匀)分布处理,因此:
u2(I)=0.1e23=223=0.58(kg)
3)由温度变化引起的标准不确定度分量u3(I)评定
由于数字指示轨道衡安装在室外,估计在规定条件下温度变化可能会造成示值变化量为0.1e(2kg),半宽a=1kg,温度按照对称正负进行变化,因此其不确定度分量可作为矩形(均匀)分布处理,包含因子k=3,因此:
u3(I)=0.1e23=223=0.58(kg)
4)合成标准不确定度分量u(I)的评定
由于分辨力导致的不确定度已包含在重复性引入的不确定度分量中,因此在u1(I)和u2(I)中取较大者,略去u2(I),合成后,
①18t最小秤量时
u(I18)=u1(I18)2+u3(I18)2=(1.2)2+(0.58)2=1.3kg
②40t秤量点时
u(I40)=u1(I40)2+u3(I40)2=(1.2)2+(0.58)2=1.3kg
③大于80t秤量点时
u(I80)=u1(I80)2+u3(I80)2=(2.4)2+(0.58)2=2.5kg
2.4.2 由检衡车和标准砝码误差引入的标准不确定度分量u3(m)的评定
18t最小秤量时,使用T7型砝码检衡车中的砝码和砝码小车组合而成, M12等级的砝码及砝码小车的相对最大允许误差为±1.0×10-4,因此18t秤量点时的最大允许误差MPE为±1.8kg,最大允许误差为对称正负变化,因此可按照矩形(均匀)分布来考虑,包含因子k=3,则:
u3(m18)=1.83=1.0(kg)
40t秤量点时,使用T7型砝码检衡车中的砝码和砝码小车组合而成,40t秤量点时的最大允许误差MPE为±4.0kg,同上按照矩形(均匀)分布来考虑,包含因子k=3,则:
u3(m40)=4.03=2.3(kg)
大于80t秤量点时,由检衡车空车和所有M12等级砝码组合成总质量82060kg,50t的M12等级砝码的最大允许误差MPE为±5.0kg,空车质量值及部分M1等级砝码质量值为32060kg(由于M1等级砝码误差很小,可一并考虑到空车质量中),按照相对最大允许误差±1.5×10-4计算,则其最大允许误差MPE为±4.8kg,检衡车空车由标准轨道衡来检定,M12等级砝码由F2等级砝码通过大质量比较仪检定,因此视为不相关,每一项按照均匀分布来考虑,包含因子k=3,则:
u3(m80)=5.032+4.832=4.0(kg)
2.5 合成标准不确定度的评定
1)轨道衡测量时各秤量的不确定度分量
轨道衡测量时各秤量的不确定度分量汇总表如表1~3。
2)合成标准不确定度的计算
各输入量彼此独立不相关,因此,合成标准不确定度为
uc(E)=uc(I)2+uc(m)2(6)
18t最小秤量时:
uc(E18)=1.32+1.02=1.7(kg)
40t秤量点时:
uc(E40)=1.32+2.32=2.7(kg)
大于80t秤量点时:
uc(E80)=2.52+4.02=4.7(kg)
2.6 扩展不确定度的评定
依据JJF 1059.1-2012 《测量不确定度评定与表示》的要求,通常取包含因子k=2。在18t、40t和大于80t秤量点的扩展不确定度为:
18t最小秤量时:
U(18)=k×uc(E18)=2×1.7=3.4(kg)
40t秤量点时:
U(40)=k×uc(E40)=2×2.7=5.4(kg)
大于80t秤量点时:
U(80)=k×uc(E80)=2×4.7=9.4(kg)
2.7 测量结果不确定度的报告与表示
18t最小秤量时,其示值误差测量结果的扩展不确定度U(18)=3.4kg,包含因子k=2。40t秤量点时,其示值误差测量结果的扩展不确定度U(40)=5.4kg,包含因子k=2。大于80t秤量点时,其示值误差测量结果的扩展不确定度U(80)=9.4kg,包含因子k=2。
3 结 论
采用GUM法对数字指示轨道衡进行了全面的不确定分析研究,详细分析了过程中引入的不确定度分量,为完善轨道衡量值溯源及传递体系提供了技术依据,数字指示轨道衡测量结果不确定度评定的结果表明:
1)不确定度主要来源于轨道衡示值和上级计量标准器带来的不确定度;
2)对于18t、40t、大于80t这3个秤量点而言,满足其相应秤量点最大允许误差(3个点分别为±20kg、±20kg、±30kg)绝对值的1/3;
3)使用轨道衡检衡车检定数字指示轨道衡,满足量值准确的计量要求。
参考文献:
[1] R106-2011, Automatic Railweigh Bridges-Metrological and Technical Requirements, Tests[S].
[2] JJG 234-2012自动轨道衡[S].
[3] 郭鹏程, 亢坚, 高东星. 数字指示轨道衡偏载检定的探索[J].铁道技术监督,2019,47(9):18.
GUO Pengcheng, KANG Jian, GAO Dongxing. Research on Unbalance Load Verification of Digital Indicated Rail-weighbridge[J]. Railway Quality Control, 2019, 47(9):18.
[4] JJG 781-2019数字指示轨道衡[S].
[5] 郝飚. 数字指示轨道衡示值误差测量结果的不确定度评定[J].铁道技术监督,2003(4):37.
HAO Biao. Evaluation of Uncertainty of Measurement Results of Error of Digital Indicating Rail-weighbridges[J]. Railway Technical Supervision,2003(4):37.
[6] 仝其恩. 数字指示轨道衡不确定度分析[J].铁道技术监督,2007(1):41.
TONG Qien. Uncertainty Analysis of Digital Indicating Rail-weighbridges[J].Railway Technical Supervision, 2007(1):41.
[7] 馮诚,郑党儿. 数字指示轨道衡称量检定的不确定度评定及应用[J].中国计量,2007(6):73.
FENG Cheng, ZHENG Danger. Evaluation and Application of Uncertainty in Verification of Digital Indicating Rail-weighbridges [J]. China Metrology,2007(6):73.
[8] JJF 1059.1-2012测量不确定度评定与表示[S].
[9] JJF 1059.2-2012用蒙特卡洛法评定测量不确定度[S].
[10]刘园园, 杨健, 赵希勇, 等. GUM法和MCM法评定测量不确定度对比分析[J].计量学报,2018,39(1):135.
LIU Yuanyuan, YANG Jian, ZHAO Xiyong, et al. Comparative Analysis of Uncertainty Measurement Evaluation with GUM and MCM[J]. Acta Metrological Sinica,2018,39(1):135.
[11]张德, 罗启铭, 张怀才. 基于GUM法的VHF系统发射功率测量不确定度评定[J].数字技术与应用,2019,37(8):47.
ZHANG De, LUO Qiming, ZHANG Huaicai. Evaluation of Uncertainty of Transmission Power Measurement of VHF System Basedon GUM[J].Digital Technology & Application,2019,37(8):47.
[12]方兴华, 宋明顺, 顾龙芳, 等. 基于自适应蒙特卡洛方法的测量确定度评定[J].计量学报,2016,37(4):452.
FANG Xinghua, SONG Mingshun, GU Longfang, et al. Application of Adaptive Monte Carlo Method on Measurement Uncertainty Evaluation[J]. Acta Metrological Sinica,2016,37(4):452.
[13]陈怀艳, 曹芸, 韩洁. 基于蒙特卡罗法的测量不确定度评定[J].电子测量与仪器学报,2011,25(4):301.
CHEN Huaiyan, CAO Yun, HAN Jie. Evaluation of Uncertainty in Measurement Based on a Monte Carlo Method[J].Journal of Electronic Measurement and Instrument,2011,25(4):301.
[14]金邵. 靜态电子轨道衡工作原理与检修[J].衡器,2015,44(11):38.
JIN Shao. The Working Principle of the Static Electronic Rail Weighbridge and Overhaul[J]. Weighing Apparatus, 2015,44(11):38.
[15]袁凡. 数字指示轨道衡日常使用维护保养[J].衡器,2010,39(8):1.
YUAN Fan. Digital Indication Rail Weighbridge Use Daily Maintenance[J]. Weighing Apparatus,2010,39(8):1.
[16]JJG 567-2012轨道衡检衡车[S].
[17]钱悦磊, 高长律, 李学宝. 轨道衡检衡车计量性能的分析与确定[J].铁道技术监督,2013,41(9):15.
QIAN Yuelei, GAO Changlv, LI Xuebao. The Analysis and Determination of the Measurement Performance of Test Vehicle for Rail-weighbridges[J]. Railway Technical Supervision,2013,41(9):15.
[18]R76-2006, Nonautomatic Weighing Instruments-Metrological and Technical Requirements and Tests-Part 1: General Measuring Instruments[S].
[19]JJG 444-2005,标准轨道衡[S].
[20]JJG 99-2006,砝码[S].
(编辑:温泽宇)
收稿日期: 2020-06-04
基金项目:
国家铁路局规划项目(KF2020-005);中国国家铁路集团有限公司科技研究开发计划重点课题(N2019B007).
作者简介:
安爱民(1980—),男,硕士,副研究员,E-mail:andym122@163.com.
