改进ADRC的增强型双向Z源逆变器直流链电压控制
2020-05-27颜景斌朴晶琳李冠达周唱刘清岚
颜景斌 朴晶琳 李冠达 周唱 刘清岚
摘 要:提出一种改进型自抗扰控制技术(ADRC)用以控制增强型双向Z源逆变器直流链电压。首先介绍了增强型双向Z源逆变器的基本工作原理,并通过对增强型双向Z源逆变器进行小信号建模指出直通占空比至Z源网络电容电压的传递函数含有右半平面零点,存在非最小相位特性。为消除非最小相位特性,选取了过渡过程短,无超调,不依赖于数学模型的自抗扰控制器,通过控制电容电压间接控制直流链电压;并在自抗扰控制器常用的非线性函数fal函数的基础上,以避免高频震颤现象和加快大误差条件下系统增益减小速率为目提出了改进的lfal函数。通过仿真结果证明了改进ADRC在增强型双向Z源逆变器直流链电压控制上的有效性,并具有更强的鲁棒性。
關键词:Z源逆变器;直流链电压;自抗扰控制;fal函数;鲁棒性
DOI:10.15938/j.jhust.2020.06.011
中图分类号: TM464
文献标志码: A
文章编号: 1007-2683(2020)06-0077-08
DC Link Voltage Control of Enhanced Bidirectional Z
Source Inverter with Improved ADRC
YAN Jing-bin, PIAO Jing-lin, LI Guan-da, ZHOU Chang, LIU Qing-lan
(School of Electrical and Electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:An improved auto disturbance rejection control technique (ADRC) is proposed to control the DC link voltage of the enhanced bidirectional Z source inverter. Firstly, the basic working principle of the enhanced bidirectional Z-source inverter is introduced, and the small-signal modeling of the enhanced bidirectional Z-source inverter indicates that the transfer function of the straight-through duty ratio to the Z-source network capacitor voltage contains the right half-plane. Zero, there is a non-minimum phase characteristic. In order to eliminate the non-minimum phase characteristics, the transient process is short, no overshoot, independent of the mathematical model of the ADRC controller, indirectly controlling the DC link voltage by controlling the capacitor voltage; and the nonlinearity commonly used in the ADRC controller Based on the function fal function, an improved lfal function is proposed to avoid high-frequency chattering and to accelerate the system gain reduction rate under large error conditions. The simulation analysis proves that the improved ADRC is effective in the DC link voltage control of the enhanced bidirectional Z-source inverter and has stronger robustness.
Keywords:Z source inverter; DC link voltage; active disturbance rejection control; Fal function; robustness
0 引 言
Z源逆变器以其具有升压能力、上下桥臂能够直通无需死区时间控制等优点被国内外专家学者广泛研究和应用[1]。通过引入开关电感技术和全控型开关管得到了增强型双向Z源逆变器拓扑结构,解决了传统Z源逆变器升压能力不足、存在非正常工作状态、无法实现能量回馈的缺点。为了保证Z源逆变器输出电压平稳,需要增加Z源逆变器直流链电压控制模块。目前针对Z源逆变器的直流链电压控制方法有PID控制[2-3]、模糊控制[4]、滑模控制[5]等。在现实中,PID控制器以其参数调试简单,应用成熟的优点被广泛应用,但由于Z源逆变器传递函数存在的非最小相位特性,若采用先进的非线性控制方法则能得到更理想的动静态特性。
自抗扰控制是韩京清教授针对PID控制器的缺陷而提出的非线性控制器[6],在继承了PID控制器不要求被控对象模型精确的优点的同时,自抗扰控制克服了超调和过渡过程之间的矛盾[7]。非线性函数是自抗扰控制器的核心,近年来许多专家学者对自抗扰控制器中的非线性函数进行了研究。文[8]构造了一种基于反正切函数的非线性函数来代替自抗扰控制器原有的非线性函数,优化了输出效果;文[9]改造了原有的非线性函数,使其更加符合“小误差大增益,大误差小增益”的特性;文[10]指出原有非线性函数存在拐点,为非光滑函数,会导致高频震颤现象,并设计了一种光滑的非线性函数解决了上述问题。
为使增强型双向Z源逆变器直流链电压稳定,本文将自抗扰控制技术应用于直流链电压控制,改进了自抗扰控制器中的非线性函数,在消除高频震颤问题的同时,增强了系统的鲁棒性。最后通过仿真验证所设计控制器的性能。
1 增强型双向Z源逆变器基本原理
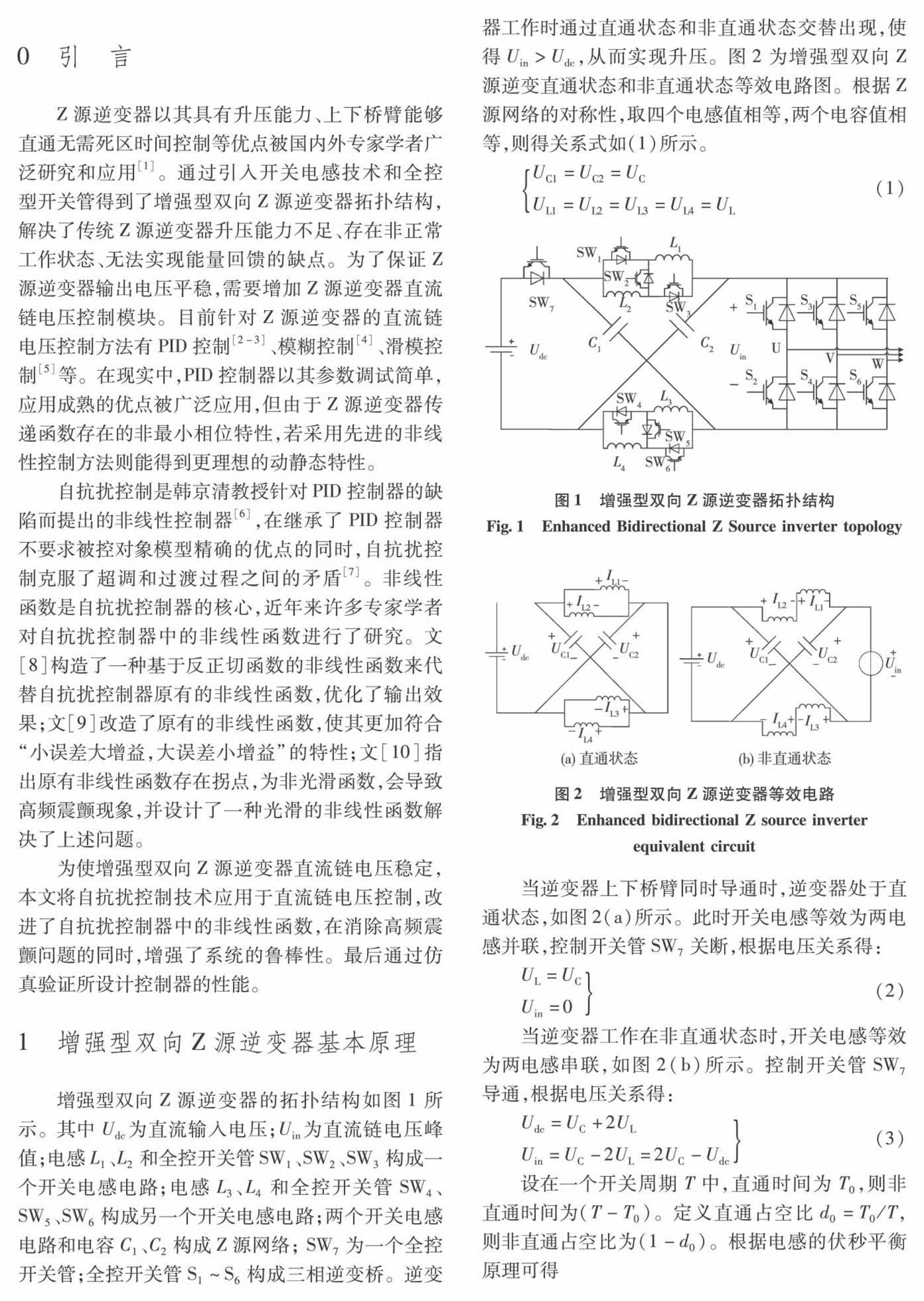
增强型双向Z源逆变器的拓扑结构如图1所示。其中Udc为直流输入电压;Uin为直流链电压峰值;电感L1、L2和全控开关管SW1、SW2、SW3构成一个开关电感电路;电感L3、L4和全控开关管SW4、SW5、SW6构成另一个开关电感电路;两个开关电感电路和电容C1、C2构成Z源网络; SW7为一个全控开关管;全控開关管S1~S6构成三相逆变桥。逆变器工作时通过直通状态和非直通状态交替出现,使得Uin>Udc,从而实现升压。图2为增强型双向Z源逆变直通状态和非直通状态等效电路图。根据Z源网络的对称性,取四个电感值相等,两个电容值相等,则得关系式如(1)所示。
UC1=UC2=UC
UL1=UL2=UL3=UL4=UL(1)
当逆变器上下桥臂同时导通时,逆变器处于直通状态,如图2(a)所示。此时开关电感等效为两电感并联,控制开关管SW7关断,根据电压关系得:
UL=UC
Uin=0(2)
当逆变器工作在非直通状态时,开关电感等效为两电感串联,如图2(b)所示。控制开关管SW7导通,根据电压关系得:
Udc=UC+2UL
Uin=UC-2UL=2UC-Udc(3)
设在一个开关周期T中,直通时间为T0,则非直通时间为(T-T0)。定义直通占空比d0=T0/T,则非直通占空比为(1-d0)。根据电感的伏秒平衡原理可得
UCd0+12(Udc-UC)(1-d0)=0(4)
整理可得
UC=1-d01-3d0Udc
Uin=1+d01-d0UC(5)
进而可得
Uin=1+d01-3d0Udc=BUdc(6)
式中:UC为电容电压;UL为电感电压;B为逆变器升压因子。
由式(6)可知,当d0<1/3时,增强型双向Z源逆变器可实现升压功能,在此范围内与传统Z源逆变器升压比相比有:
1+d01-3d0>11-2d0(7)
因此,与传统Z源逆变器相比增强型双向Z源逆变器具有更强的升压比。
2 Z源逆变器小信号模型
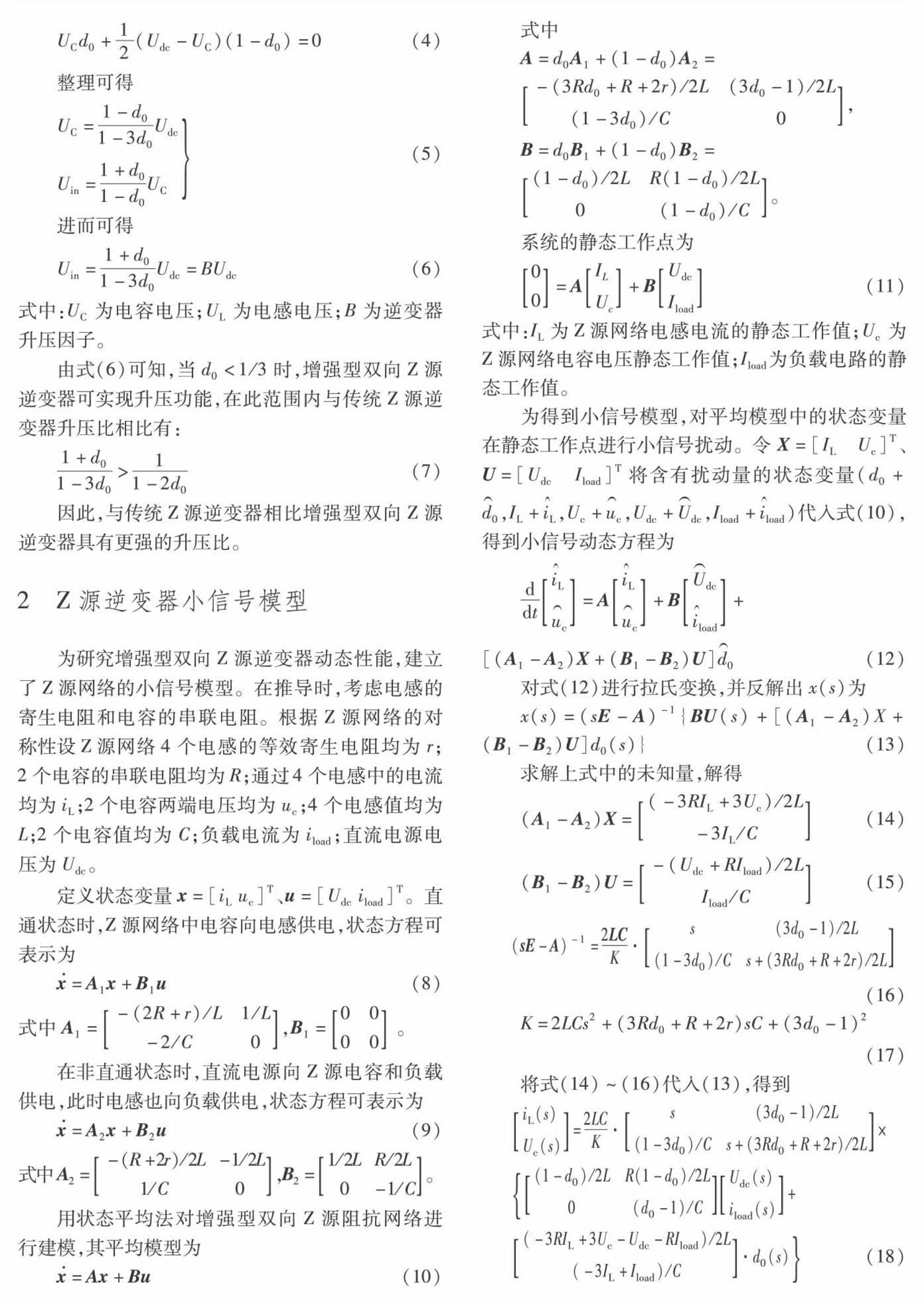
为研究增强型双向Z源逆变器动态性能,建立了Z源网络的小信号模型。在推导时,考虑电感的寄生电阻和电容的串联电阻。根据Z源网络的对称性设Z源网络4个电感的等效寄生电阻均为r;2个电容的串联电阻均为R;通过4个电感中的电流均为iL;2个电容两端电压均为uc;4个电感值均为L;2个电容值均为C;负载电流为iload;直流电源电压为Udc。
定义状态变量x=[iL uc]T、u=[Udc iload]T。直通状态时,Z源网络中电容向电感供电,状态方程可表示为
=A1x+B1u(8)
式中A1=-(2R+r)/L1/L-2/C0,B1=0000 。
在非直通状态时,直流电源向Z源电容和负载供电,此时电感也向负载供电,状态方程可表示为
=A2x+B2u(9)
式中A2=-(R+2r)/2L-1/2L1/C0,
B2=1/2LR/2L0-1/C。
用状态平均法对增强型双向Z源阻抗网络进行建模,其平均模型为
=Ax+Bu(10)
式中
A=d0A1+(1-d0)A2=
-(3Rd0+R+2r)/2L(3d0-1)/2L(1-3d0)/C0,
B=d0B1+(1-d0)B2=
(1-d0)/2LR(1-d0)/2L
0(1-d0)/C。
系统的静态工作点为
00=AILUc+BUdcIload(11)
式中:IL为Z源网络电感电流的静态工作值;Uc为Z源网络电容电压静态工作值;Iload为负载电路的静态工作值。
为得到小信号模型,对平均模型中的状态变量在静态工作点进行小信号扰动。令X=[IL Uc]T、U=[Udc Iload]T将含有扰动量的状态变量(d0+d0,IL+iL,Uc+uc,Udc+Udc,Iload+iload)代入式(10),得到小信号动态方程为
ddtiLuc=AiLuc+BUdciload+
[(A1-A2)X+(B1-B2)U]d0(12)
对式(12)进行拉氏变换,并反解出x(s)为
x(s)=(sE-A)-1{BU(s)+[(A1-A2)X+(B1-B2)U]d0(s)}(13)
求解上式中的未知量,解得
(A1-A2)X=(-3RIL+3Uc)/2L
-3IL/C(14)
(B1-B2)U=-(Udc+RIload)/2L
Iload/C(15)
(sE-A)-1=2LCK·s(3d0-1)/2L
(1-3d0)/Cs+(3Rd0+R+2r)/2L(16)
K=2LCs2+(3Rd0+R+2r)sC+(3d0-1)2(17)
将式(14)~(16)代入(13),得到
iL(s)Uc(s)=2LCK·
s(3d0-1)/2L(1-3d0)/Cs+(3Rd0+R+2r)/2L×
(1-d0)/2LR(1-d0)/2L0(d0-1)/C
Udc(s)iload(s)+
(-3RIL+3Uc-Udc-RIload)/2L(-3IL+Iload)/C·d0(s)(18)
推导出增强型双向Z源网络电容电压表达式为
Uc(s)=(1-3d0)(1-d0)KUdc(s)+(6Rd0+2r+2Ls)(d0-1)Kiload(s)+
(1-3d0)(-3RIL+3Uc-Udc-RIload)+(2Ls+3Rd0+R+2r)(-3IL+Iload)Kd0(s)(19)
令式(19)中Udc(s)=0、iload(s)=0,得到直通占空比d0(s)至Z源网络电压Uc(s)的传递函数
GUcd0=Uc(s)d0(s)=(1-3d0)(-3RIL+3Uc-Udc-RIload)+(2Ls+3Rd0+R+2r)(-3IL+Iload)K(20)
将上述计算结果代入式(11)求解静态工作点
IL=d0-13d0-1Iload(21)
Uc=d0-13d0-1Udc+(6Rd0+2r)(d0-1)(3d0-1)2Iload(22)
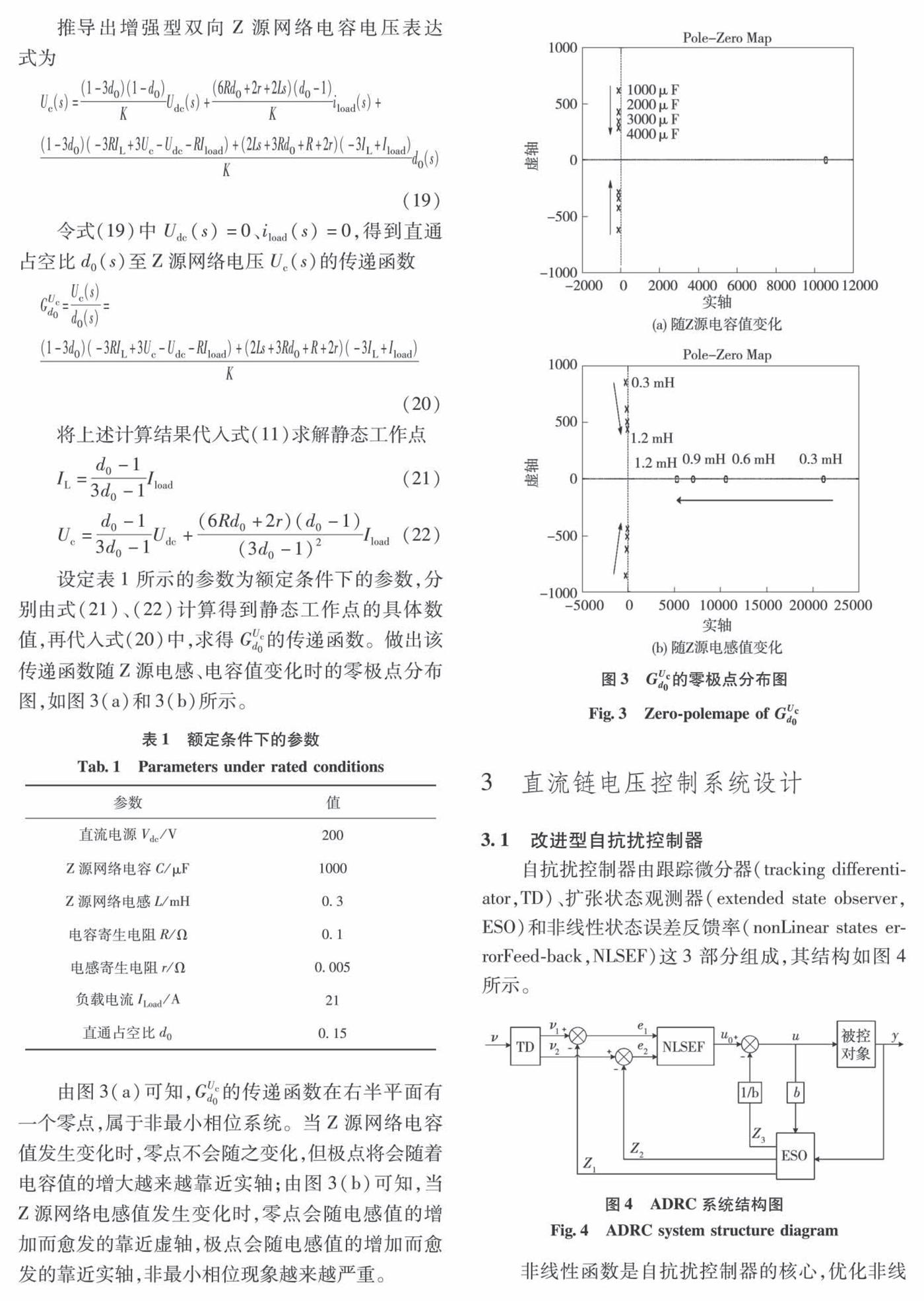
设定表1所示的参数为额定条件下的参数,分别由式(21)、(22)计算得到静态工作点的具体数值,再代入式(20)中,求得GUcd0的传递函数。做出该传递函数随Z源电感、电容值变化时的零极点分布图,如图3(a)和3(b)所示。
由图3(a)可知,GUcd0的传递函數在右半平面有一个零点,属于非最小相位系统。当Z源网络电容值发生变化时,零点不会随之变化,但极点将会随着电容值的增大越来越靠近实轴;由图3(b)可知,当Z源网络电感值发生变化时,零点会随电感值的增加而愈发的靠近虚轴,极点会随电感值的增加而愈发的靠近实轴,非最小相位现象越来越严重。
3 直流链电压控制系统设计
3.1 改进型自抗扰控制器
自抗扰控制器由跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)和非线性状态误差反馈率(nonLinear states errorFeed-back,NLSEF)这3部分组成,其结构如图4所示。
非线性函数是自抗扰控制器的核心,优化非线性函数能够明显提升自抗扰控制器的性能。目前广泛应用的非线性函数fal函数的形式如下所示:
fal(e,α,δ)=eδ1-α,|e|≤δ
|e|αsign(e),|e|>δ(23)
式中e为误差;δ为fal函数线性段与非线性段的转折点,其大小与fal函数线性段的斜率成反比;α会影响fal函数的图形形状。
不同α条件下fal函数的图形如图5所示,由图中可知当e的绝对值小于等于δ时,ESO工作在线性段,从而能够避免误差值非常小而产生的高频振荡,其中α越小,在相同误差e的条件下fal函数绝对值越大;当e的绝对值大于δ时,ESO工作在非线性段,当误差绝对值小于1时,α越小,在相同误差e的条件下fal函数绝对值越大;当误差绝对值大于1时,α越大,在相同误差e的条件下fal函数绝对值越大;当误差绝对值等于1时,在相同误差e的条件下fal函数绝对值相等。
非线性函数fal函数具有误差小时,增益大;误差大时,增益小的特性。但由图5所示,fal函数曲线不平滑,具有拐点,而这种不平滑的特性会导致抖振现象。为解决上述问题,文[11]对fal函数的线性段,即误差e的绝对值小于等于δ的部分进行了改进,通过连续光滑条件,构造了整体光滑无拐点的非线性函数qin函数,其表达式如下所示。
qin(e,α,δ)=(α-1)δα-3×e3
-(α-1)δα-2×e2sign(e)
+δα-1e,|e|≤δ
|e|αsign(e),|e|>δ(24)
文[12]提出在大误差条件下,为了加快减小系统增益,在fal函数的基础上增加了误差绝对值大于1
时,令fal函数为恒值1。上述改进虽然大大降低了大误差产生的增益量但会导致抖振现象。
因此,本文在qin函数的基础上,构造连续光滑函数lfal函数,使其不但连续光滑无抖振现象,而且在大误差条件下能够加快减小系统增益,使其具有更强的鲁棒性。
在e的绝对值小于等于δ的区间内,lfal函数满足
lfal(e,α,δ)=(α-1)δα-3×e3-(α-1)δα-2×e2sign(e)+δα-1e(25)
在e的绝对值大于δ且小于1的区间内,lfal函数满足
lfal(e,α,δ)=|e|αsign(e)(26)
在e的绝对值大于1的区间内,为满足函数经过过渡后接近常值1从而加快减小系统增益,设
lfal(e,α,δ)=k1atan[k2(x-b)]+k1z(27)
式中k1、k2、b、z为函数系数。
为满足连续光滑条件,式(27)满足如下条件:
lfal(1)=1
lfal(-1)=-1
lfal′(1)=α
lfal′(-1)=-α(28)
代入(27)解得:
b1=1±(k1k2α-1)k22
z1=1-k1atan[k2(1-b)]k1,e≥1
b-1=abs±k1k2-α-1k22-1
z-1=-1-k1atan[k2(-1-b)]k1,e≤-1(29)
因此,完整lfal函数的形式为:
lfal(e,α,δ)=|e|αsign(e),1≥|e|≥δ
(α-1)δα-3×e3
-(α-1)δα-2×e2sign(e)
+δα-1e,|e|≤δ
k1atan[k2(x-b1)]+k1z1,e≥1
k1atan[k2(x-b-1)]+k1z-1,e≤-1(30)
取α=0.5,δ=0.3,k1=0.1,k2=5,得到的lfal函数图形如图6所示。从图中可见,lfal函数各点连续光滑,避免了高频震颤现象,并且当误差大于1时,lfal函数无限趋近与一个常值,加快减小了大误差条件下的系统误差。
3.2 直流链电压控制器设计
由于直流链电压是高频脉动量,不易直接测量,本文选择通过控制Z源网络电容电压来间接控制直流链电压,在控制时应将直流链电压参考值转换为电容电压参考值。增强型双向Z源逆变器工作在非直通状态时,存在Uin=2UC-Udc,因此基于改进ADRC的增强型双向Z源逆变器直流链电压控制框图如图7所示。
改进自抗扰控制器就是在经典自抗扰控制器的基础上,将lfal函数替换原有ESO中的fal函数。由于lfal函数保持了fal函数所满足的有界性等条件,由文[13]可知改进ESO满足稳定的充分条件,因此可判定改进型自抗扰控制器的ESO具有李雅普诺夫意义下的渐进稳定。
4 仿真分析
为验证改进ADRC应用于增强型双向Z源逆变器直流链电压控制的有效性和强鲁棒性,利用Matlab/Simulink仿真平台搭建了仿真模型,并与经典自抗扰控制和PID控制进行比较。自抗扰控制器的仿真参数如表2所示,改进型ADRC和经典ADRC使用相同的参数。
仿真时设置输入电压为200V,总仿真时长为0.15s。为验证改进自抗扰控制的强鲁棒性,在0.075s时设置电源电压跌落20%,应用经典自抗扰控制、PID控制和改进自抗扰控制的直流链电压仿真结果如图8所示。
从图8(a)可以观察到,对于输入电压的波动,PID控制存在具有较大的超调量,过渡过程非常长的缺点,其电压跳变后的恢复时间长达0.05s。从图8(b)、8(c)可以观察到,经典自抗扰控制和改进自抗扰控制无超调,过渡过程短,并且都能使直流链电压在短时间内恢复稳定,经典自抗扰控制下的直流链电压在输入电压跳变时,电压跳变至520V,经0.007s恢复稳定;改进自抗扰控制下的直流链电压跳变时,电压跳变至511V,经0.0045s恢复稳定。
如图9所示为在0.075s负载突然增大15Ω时的直流链电压仿真波形图。从图9(a)中可以看出对于负载的突然变化,PID控制下的直流链电压会出现波动,经过一段时间后恢复平稳,而从图9(b)、9(c)中可以看出,经典自抗扰控制和改进自抗扰控制下的直流链电压基本保持不变,具有非常强的鲁棒性。
5 结 论
针对增强型双向Z源逆变器所具有的非最小相位特性问题,设计了基于ADRC的直流链电压控制器,并以消除高频震颤现象和增强鲁棒性为目的在fal函数的基础上设计了lfal函数。通过仿真分析验证了所设计的基于lfal函数的改进型自抗扰控制器能够使Z源逆变器直流链电压在输入电压存在较大幅度波动时迅速恢复稳定,并且在负载突然增大的情况下基本保持不变。与传统自抗扰控制相比,改进型自抗扰控制器鲁棒性更强,更能减小系统参数变化的影响,并且该控制器设计过程简单,不依赖于系统的数学模型,同时使得直流链电压波形具有过渡过程短、无超调的优点。
参考文献:
[1] PENG F Z.Z-source Inverter[J].IEEE Transactions on Industry Applications,2003.39(2):504.
[2] DING Xinping, QIAN Zhaoming, YANG Shuitao, et al. A Direct Peak DC-link Boost Voltage Control Strategy in Z-Source Inverter[P]. Applied Power Electronics Conference, APEC 2007-Twenty Second Annual IEEE,2007.
[3] 蔡春伟,曲延滨,盛况.增强型Z源逆变器的直流链电压直接控制策略[J].电机与控制学报,2012,16(5):73.
CAI Chunwei, QU Yanbin, SHENG Jing. Direct Control Strategy of DC Link Voltage for Enhanced Z-source Inverter[J]. Journal of Electric Machinery and Control, 2012, 16(5): 73.
[4] 丁新平,钱照明,崔彬,等.基于模糊PID的Z源逆变器直流链升压电路控制[J].中国电机工程学报,2008(24):31.
DING Xinping, QIAN Guangming, CUI Bin, et al. Control of DC Chain Boost Circuit of Z Source Inverter Based on Fuzzy PID[J]. Proceedings of the CSEE, 2008(24):31.
[5] 王晓刚,肖立业.Z源逆變器直流链电压滑模控制研究[J].电机与控制学报,2015,19(2):1.
WANG Xiaogang, XIAO Liye.Study on Voltage Sliding Mode Control of DC Link in Z Source Inverter[J].Journal of Electric Machines and Control,2015,19(2):1.
[6] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998(1):19.
HAN Jingqing. Auto-disturbance Controller and Its Application [J]. Control and Decision, 1998 (1): 19.
[7] HAN J. From PID to Active Disturbance Rejection Control[J].IEEE Trans on Industrial Electronics, 2009, 56(3):900.
[8] 周林阳,王生捷.基于反正切非线性函数的自抗扰控制[J].上海交通大学学报,2013,47(7):1043.
ZHOU Linyang, WANG Shengjie. Active Disturbance Rejection Control Based on Arctangent Nonlinear Function[J]. Journal of Shanghai Jiaotong University, 2013, 47(7): 1043.
[9] XIA G Y, LIU Z H. Quadrotor Unmanned Helicopter Attitude Control Based on Improved ADRC[C]// Guidance,Navigation and Control Conf. Yantai: IEEE, 2014:916.
[10]刘丙友,竺长安,郭兴众,等.基于改进型ADRC的永磁同步电机转子位置角控制方法[J].电机与控制学报,2017,21(12):24.
LIU Bingyou, PEI Changan, GUO Xingzhong, et al. Rotor Position Angle Control Method of Permanent Magnet Synchronous Motor Based on Improved ADRC[J].Journal of Electric Machines and Control,2017,21(12):24.
[11]齐乃明,秦昌茂,宋志国.高超声速飞行器改進自抗扰串级解耦控制器设计[J].哈尔滨工业大学学报,2011,43(11):34.
QI Naiming, QIN Changmao, SONG Zhiguo.Design of Improved Self-disturbance Cascade-level Decoupling Controller for Hypersonic Vehicles[J].Journal of Harbin Institute of Technology,2011,43(11):34.
[12]陈志旺,张子振,曹玉洁.自抗扰fal函数改进及在四旋翼姿态控制中的应用[J].控制与决策,2018,33(10):1901.
CHEN Zhiwang, ZHANG Zizhen, CAO Yujie.Improvement of Self-disturbance Fal Function and Its Application in Four-rotor Attitude Control[J].Control and Decision,2018,33(10):1901.
[13]赵海香. 自抗扰控制器的优化设计与应用[D].哈尔滨:哈尔滨工业大学,2013.
(编辑:王 萍)
收稿日期: 2019-04-24
基金项目: 莫斯科国际科学技术中心科研项目(2014-МНТЦB-1375).
作者简介:
朴晶琳(1996—),女,硕士研究生;
李冠达(1994—),男,硕士研究生.
通信作者:
颜景斌(1972—),男,博士,教授,E-mail:565510645@qq.com.
