基于滑模控制的TPESFTI驱动DFIG系统FCS-MPC
2020-05-26郭秋芬任神河
孟 惠,郭秋芬,任神河
(咸阳师范学院 物理与电子工程学院,咸阳 712000)
0 引 言
随着社会科技的迅速发展,人们对能源的需求越来越大,风能可再生且效率高,因此风力发电受到了广泛的关注。交流风力发电机系统中机侧交流逆变器是重要的组件之一,对逆变器进行控制研究具有重要的应用价值。在1981年NABAE等[1]学者提出了中点箝位型(neutral point clamped, NPC)三电平逆变器的拓扑结构和空间电压矢量。由于NPC型三电平驱动控制具有良好的电信号谐波以及电子器件和开关频率减半等优势,所以,在风力发电机系统中得到了广泛应用[2-7]。NPC型三电平逆变器构造需要更多的功率管器件,一旦某桥臂故障时,将不能保证控制系统稳定运行,导致逆变器的可靠性降低[8]。因此,研究逆变器短路或断路时的容错控制技术,保障系统持续稳定运行,具有重要的实际意义。近些年来,学者对NPC型三电平逆变器故障时容错控制策略进行了广泛的研究[9-16]。当该逆变器的某一桥臂短路或断路时,主要的容错控制策略包括:三桥臂容错拓扑结构[9-13]和四桥臂容错拓扑结构[14-16]。四桥臂容错拓扑结构将故障桥臂用相同的冗余桥臂代替;相比四桥臂容错拓扑结构,三桥臂容错拓扑结构具有结构简单、价格便宜等优势。但是三桥臂容错拓扑驱动系统中,当直流母线两电容电压不均衡时,该驱动系统输出电压和电流会出现较高谐波现象,从而导致逆变器的可靠性降低,同时会降低控制系统的动态性能。针对上述问题,文献[13]对三桥臂容错拓扑结构中电容分压不均衡进行了详细的分析,并且利用电流反馈特性对其进行抑制,提高系统的性能。因此,对三相八开关容错逆变器(以下简称TPESFTI)中直流侧电压波动进行容错控制具有重要的应用价值。
双馈异步风力发电机(以下简称DFIG)系统中,直接转矩控制(以下简称DTC)是在定向磁链控制(以下简称FOC)理论之后被提出的一种可靠高效的控制方法,其具有简单易行、响应快、对电机内部不确定项(即电机参数)不敏感等突出优势[17],因而得到了学者们的广泛关注和应用。但是,DTC存在电磁转矩大、定子磁链脉动大以及开关损耗大等问题,难以在高精度控制领域广泛应用。近年来,学者们提出了有限控制集模型预测控制(以下简称FCS-MPC)[18-19],FCS-MPC具有非线性约束性较强、结构简单、动态响应快和解耦彻底等显著特点,因此在电机控制领域得到广泛的研究和应用[20-21]。但是,该控制策略中需要对逆变器开关状态所对应的状态变量进行预测,系统计算量大,从而导致系统延迟,进而影响系统控制性能。基于上述问题,文献[22]通过最小开关状态选择出部分基本电压矢量,该控制方法虽然减小了系统的运算量,但是其定子参考电压为直接推导得出,不够准确,会对系统造成不利影响,导致系统控制性能降低。
针对逆变器容错控制问题,本文给出了TPESFTI的拓扑结构和输出电压模型,研究分析了TPESFTI中电容电压波动的原因,并且构造了该逆变器的不平衡电压的动态模型;同时利用FCS-MPC中目标性能函数的非线性约束项来抑制不平衡电压对系统的影响;并对TPESFTI的DFIG驱动系统,为了提高FCS-MPC的性能,研究了一种基于滑模控制的FCS-MPC策略。
1 TPESFTI拓扑以及DFIG数学模型
1.1 TPESFTI和输出电压模型
NPC型三电平供电的DFIG驱动系统的拓扑结构如图1所示。将通过双向晶闸管TRn(n=a,b,c)连接直流侧母线电容中点o与DFIG系统绕组相输入端。当NPC型三电平逆变器某相桥臂出现故障时,实时准确地判断短路或断路的位置,通过熔断器F1x或F2x隔离该故障桥臂,并将其故障桥臂用直流侧电容代替,同时采用TPESFTI的脉冲触发其它桥臂的正常运行。假设a相桥臂发生故障时,图2给出了TPESFTI和DFIG系统的等效结构。

图1 NPC型三电平逆变器的DFIG驱动系统拓扑结构

图2 基于TPESFTI驱动DFIG系统的结构
此时,系统在b和c相正常桥臂的功率管作用下,将形成9个基本电压矢量,其中包含6个小矢量Vi(i=1,2,…,6)、2个中矢量Vi(i=7,8)和一个零矢量V0;该故障条件下的TPESFTI空间矢量电压如图3所示。
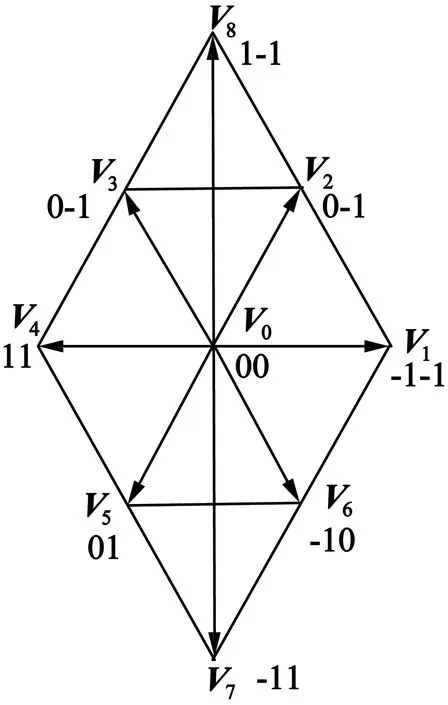
图3 TPESFTI的空间矢量电压
定义TPESFTI的输出端与DFIG中心点的电压值分别为uao,ubo,uco;则其表示[13]:
(1)
式中:udc为直流侧电压;Si(i=b,c)为b,c桥臂的开关函数,则Si(i=b,c)可表示:
(2)
将式(2)进行Clarke变换,可得到α,β静止坐标系下TPESFTI的输出电压方程:
(3)
1.2 DFIG系统的数学模型
假设DFIG系统的铁损等忽略不计,得到DFIG在两相旋转d,q坐标系中的数学模型及状态方程。DFIG的电压方程和磁链方程:
(4)
(5)
式中:isd,isq,ird,irq分别为在d,q轴系下DFIG的定子和转子电流;ψsd,ψsq,ψrd,ψrq分别为在d,q轴系下DFIG的定子和转子磁链;usd,usq,urd,urq分别为在d,q轴系下DFIG的定子和转子电压。
根据式(4)和式(5)可得DFIG在两相d,q坐标系下的ωr-is-ψr状态方程:
(6)

1.3 直流侧母线两电容电压不平衡分析
在TPESFTI驱动DFIG系统中,母线电容电压分压不均时,驱动逆变器输出信号存在巨大的脉动[12]。从图2可以看出,母线中点电流不稳定是导致输出信号波动的原因。假设c相(或b相)的状态为Sc=0(或Sb=0),通过KCL(基尔电流定律)可获得中点电流:i0=ia+ib(或i0=ia+ic)[13]。
当直流侧两电容C1=C2=C时,TPESFTI中直流侧母线中点的电流为i0,用开关函数表示:
i0=ia+(1-|Si|)iii=b,c
(7)
式中:ia,ib,ic分别为DFIG系统的三相定子电流。
可得到α,β轴系下i0的方程:
(8)
此时,直流侧母线不平衡电压Δu:

(9)
根据式(9)可得到不平衡电压Δu的状态方程:
(10)
2 基于滑模控制的TPEFTI驱动DFIG系统FCS-MPC
针对NPC TPEFTI的DFIG驱动系统,主要包括:TPESFTI、PI 控制器、基于滑模控制的FCS-MPC以及直流侧不平衡电压的预测模型、性能目标函数等,其结构框如图4所示。
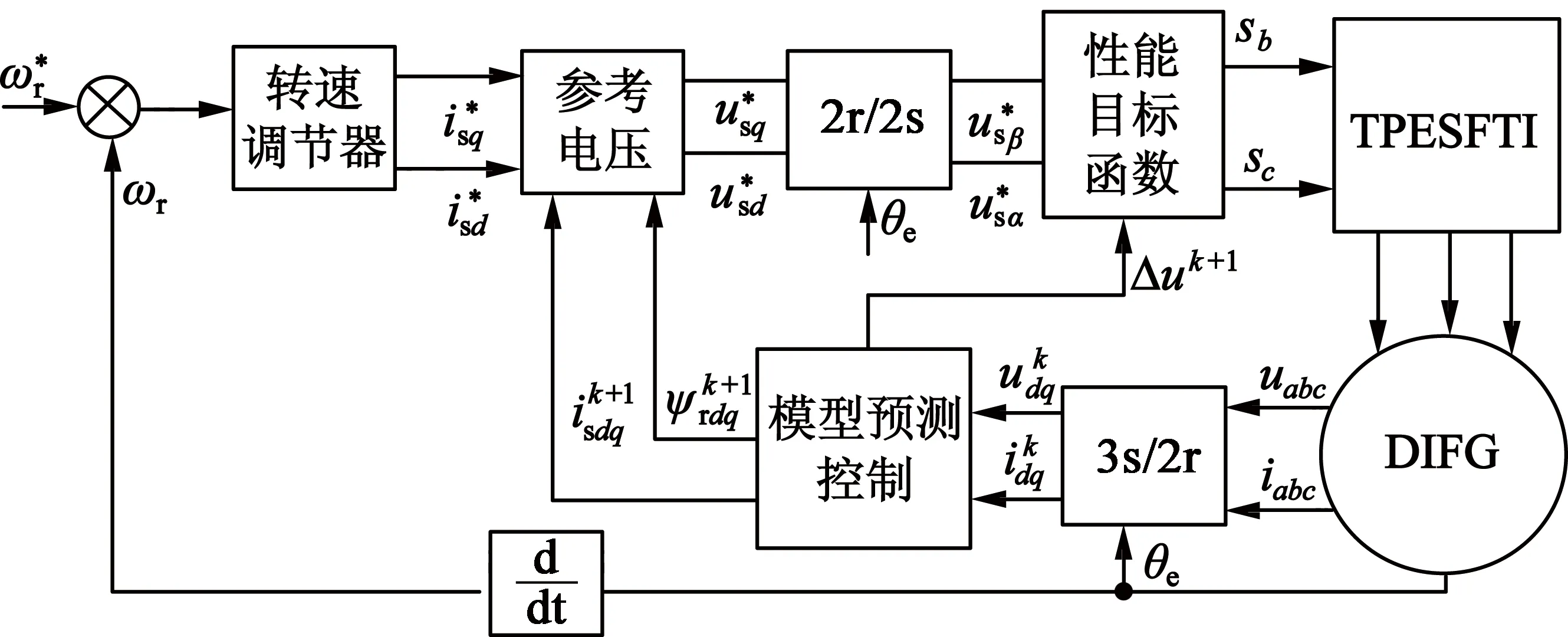
图4 基于滑模控制的TPEFTI驱动
2.1 基于滑模控制的FCS-MPC
为了表示方便,对式(6)进一步整理:
(11)
(12)

将利用二阶欧拉方程对式(11)和式(12)进行离散化:
x1(k+1)=x1(k)+Ts{[k1(Ax2(k)-
k4x1(k)]-Bx1(k)+k3u(k)}
(13)
x2(k+1)=x2(k)+Ts[k4x1(k)-Cx2(k)]
(14)
式中:Ts为采样周期;x1(k)和x2(k)为k时刻状态变量值;u(k)为输入量的值;x1(k+1)和x2(k+1)为x1(k)和x2(k)预测值。
将式(10)进一步整理:
(15)
式中:Ts为采样周期;Δu(k)为k时刻不平衡电压值;Δu(k+1)为Δu(k)的预测值。
将式(13)进一步整理:
k4x1(k)]-Bx1(k)}
(16)
k4x1(k)]-Bx1(k)}
(17)
根据坐标变换可得到DFIG系统在α,β坐标系下定子电压参考值:
(18)
选取性能目标函数:
(19)
式中:ui为基本电压;Δui为不平衡补偿电压。
由于定子参考电压取决于系统数学模型,会受外界干扰的影响,滑模控制具有较强的鲁棒性,但存在高频抖振现象。为了提高系统的鲁棒性,本文采用fal函数控制律的滑模控制来改进,不仅能提高系统的鲁棒性,而且能消弱其抖振[23]。
假设DFIG系统的d,q轴定子电流误差值:
(20)

s=es=[esdesq]T
(21)
对式(21)求导可得:
(22)
假设滑模控制趋近律[23]:
(23)
式中:ε1和ε2均大于零。
定子电压参考值,即滑模控制器:
(24)
式中:D=[fal(ssd,α1,δ1) fal(ssq,α2,δ2)]T,λ=[ε1/k3ε1/k3]T。

-ssdε1fal(ssd,α1,δ1)-ssqε2fal(ssq,α2,δ2)
(25)
可得到离散的定子参考电压 ,滑模控制器:

k4x1(k)]-Bx1(k)}+λD
(26)
选取性能目标函数:
(27)
2.2 DFIG驱动系统的延迟补偿
在实际控制系统过程中,数字控制策略有一个采样周期的延迟,若将预测获得的最佳基本矢量电压直接作用于控制系统中,会造成系统延迟,并且影响系统的动态性,因此,对系统进行延迟补偿具有重要意义[19]。延迟补偿的实质是将(k+1)Ts时刻的状态变量x(k+1)作为初始值,通过式(11)预测出(k+2)Ts时刻的状态变量x(k+2),其表达式如下:
x1(k+2)=x1(k+1)+Ts{k1[Ax2(k+1)-
k4x1(k+1)]-Bx1(k+1)+k3u(k+1)}
(28)
将系统延迟补偿之后,其性能目标函数:
(29)
3 仿真研究分析
为验证TPESFTI驱动DFIG系统FCS-MPC的控制效果,在MATLAB的平台上搭建图4的仿真模型,并进行研究分析。在仿真分析验证中,表1给出了DFIG参数。系统的采样时间为10 μs;图4中的PI参数:ki=0.05,kp=30;权值系数:λ1=95,λ2=10。

表1 DFIG参数
为了验证TPESFTI驱动DFIG系统的可靠性和控制性能,基于同样的FCS-MPC策略和PI控制器参数,构建基于不平衡电压补偿的TPESFTI驱动DFIG系统(系统Ⅰ)和传统TPESFTI驱动DFIG系统(系统Ⅱ)的仿真模型,并对其结果进行分析比较。系统的给定转速ω*为1 000r/min,DFIG系统带载5N·m起动,图5和图6分别为系统Ⅰ和系统Ⅱ的定子磁链响应;图7和图8为系统Ⅰ和系统Ⅱ的三相定子电流响应。
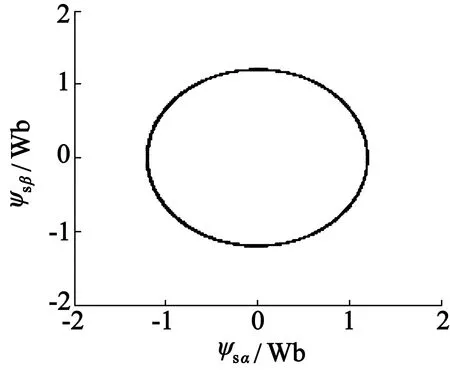
图5 系统Ⅰ的定子磁链

图6 系统Ⅱ的定子磁链
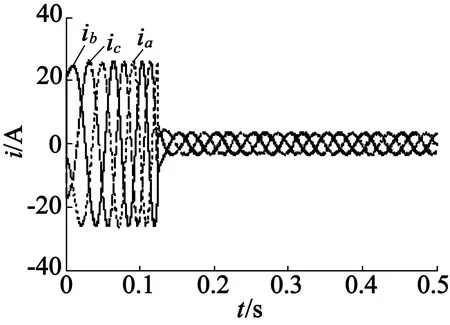
图7 系统Ⅰ的定子电流
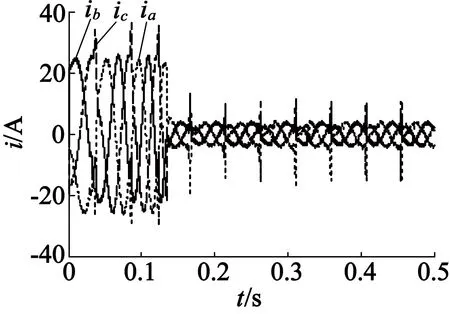
图8 系统Ⅱ的定子电流
从图5和图6可看出,系统Ⅱ的定子磁链存在较大的畸变现象。相比系统Ⅱ,系统I的定子磁链平稳光滑,具有较小的定子磁链脉动,定子磁链可以直接控制系统转矩的平稳性。由图7和图8可知,未对TPESFTI中直流侧母线两电容不平衡电压进行补偿的系统Ⅱ具有谐波失真现象,而基于不平衡电压补偿的系统Ⅰ的定子电流比较平稳光滑。表2给出了基于不平衡电压补偿的TPESFTI驱动DFIG系统(系统Ⅰ)和传统TPESFTI驱动DFIG系统(系统Ⅱ)的定子电流THD值。由表2可知,相比传统的系统Ⅱ,基于不平衡电压补偿的系统Ⅰ具有较小的电流THD值。因此,基于不平衡补偿的控制策略不仅能有效抑制系统电流谐波,而且能够提高系统性能。a,b,c三相电流THD值的计算方程:
(30)
式中:Xn表示为系统的高次谐波值;X1表示为系统的基波值。

表2 定子电流THD
为了验证本文所设计的基于滑模转速控制器的FCS-MPC策略的抗负载能力,在相同的PI控制器条件下,分别建立基于传统FCS-MPC的DFIG系统(系统Ⅱ)和基于改进FCS-MPC的DFIG系统(系统Ⅰ),并对其性能进行分析。此时PI参数:kp=30,ki=0.05;DFIG系统给定转速ω*为1 000r/min,DFIG系统空载起动,在0.2s时负载加至3N·m。图9为两个系统的转速响应曲线;图10为在d,q轴系下系统Ⅰ的定子电流响应曲线;图11为在d,q轴系下系统Ⅰ的转子磁链响应曲线;图12为系统Ⅰ的电磁转矩响应曲线。
图9表明,基于传统FCS-MPC的DFIG系统(系统Ⅱ)转速响应时间为0.15s,并且在加载之后无法恢复至稳定值;基于改进FCS-MPC的DFIG系统(系统Ⅰ)的响应时间为0.013 6s,并且系统能够

图9 系统Ⅰ和系统Ⅱ的转速

图10 在d,q轴系下系统Ⅰ的定子电流响应

图11 在d,q轴系下系统Ⅰ的转子磁链响应

图12 系统Ⅰ的电磁转矩
恢复至给定值;与系统Ⅱ相比,系统Ⅰ具有较快的响应速度和较强的抗干扰能力。
图10、图11和图12表明,基于改进FCS-MPC的DFIG系统(系统Ⅰ)在d,q轴系下具有光滑平稳的定子电流、转子磁链以及电磁转矩,并且它们都具有较小的波动。
4 结 语
本文研究了NPC型三电平逆变器单桥臂故障条件下的DFIG系统FCS-MPC策略。针对NPC型三电平逆变器某桥臂发生短路或断路等问题,给出了TPESFTI的拓扑结构和输出电压模型。针对TPESFTI中直流侧电压分压不均衡等现象,通过在FCS-MPC中的目标函数添加非线性约束来实现。为了提高FCS-MPC的控制性能,构造基于滑模控制的FCS-MPC策略。仿真结果表明,本文的控制方法能使DFIG系统良好稳定运行,并能使母线电容电压的不平衡得到有效抑制,实现了较快的响应速度和较强抗负载能力,同时具有较小的电磁转矩和转子磁链脉动以及电流谐波值,提高了DFIG系统的动态性能。
