十八相电机模块化设计及改进的模型预测控制
2020-05-26张端倪黄守道
张端倪,黄守道
(湖南大学 电气与信息工程学院,长沙 410082)
0 引 言
随着电力电子技术和电机控制等相关学科的发展,交流电机相数不再受供电相数限制。在舰船推进、电动汽车、航空航天等需要高可靠性和低压大功率电能传输的领域,多相电机及其控制具有以下优势:
1) 无需复杂器件并联就可以实现低压大功率,适用于低压供电场合[1-3];
2) 相数冗余,多相电机可以在缺相的情况下继续运行,可靠性高[4-5];
3) 电机转矩脉动频率增加,幅值减小[6-9];
4) 直流侧母线电流的谐波含量较低[10]。
文献[11-13]研究了十二相永磁同步电机的容错控制,实现了多相电机在故障状态下的降频运行。但在故障时建立解耦模型的过程非常复杂,且故障的位置会影响数学模型和解耦矩阵,目前没有一种通用的方案来描述。文献[14]对多相电机采用矢量控制策略,在一定程度提升了电机转矩密度和铁心利用率,但采用的磁链观测装置受外界因素的影响较大,且转速的测量误差很容易影响磁链的计算。针对文献[15-17]设计的该类型模块化多相永磁同步电机,研究学者大都从电机本体角度进行考虑,没有从控制的角度结合该类型电机的结构及特性来提出一种优良的控制策略。
本文基于十八相电机提出多相电机的模块化设计,基于3×6的电机设计方案进行电机的硬件拓扑模块化设计。控制系统硬件采用多种模块,通过背板链接的方式完成对多项电机的控制,便于安装和调试。在控制策略上,采取分层控制方式,底层控制采用基于条件触发的模型预测控制,顶层控制采取基于电压电流排序的模型预测控制算法,改善了多相电机的运行性能。
1 十八相永磁同步电机的特性
对比多相电机和三相电机的磁力线分布,由图1可知,将三相扩展到多相电机,电机内部各绕组之间的电磁耦合特性较弱。多相电机可以看成N×3
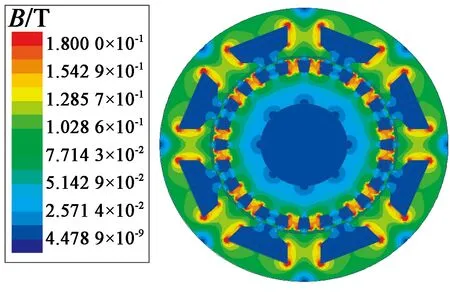
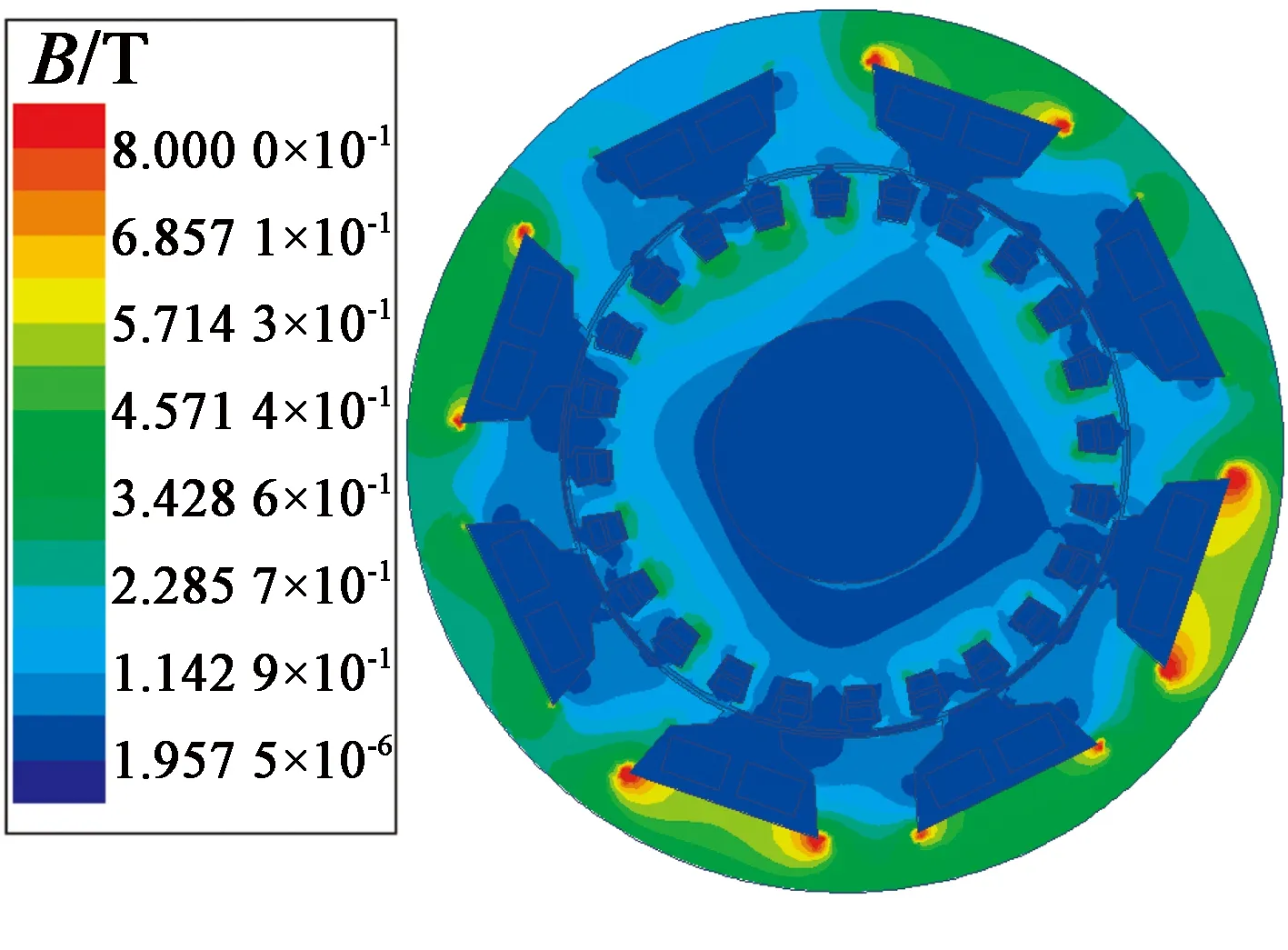
t=15 ms,n=3 000 r/min,θ=270°
的形式进行控制,因此,可以将十八相电机拆分成六个三相电机单元进行控制。
电机单元的变换方程:
(1)
式(1)将三相电流ia,ib,ic等效到d,q轴上,形成了同步旋转系d,q轴电流,之后建立同步旋转的磁链方程。得到基本的三相同步电机磁链方程:
(2)
式中:LSS,LSR,LRS,LRR分别为电机中a,b,c,D,Q,f绕组的互感矩阵;iabc,ifDQ分别为电流矩阵;φabc,φfDQ为经过计算的磁通矩阵。将式(2)左边进行Park变换,再将式(1)代入,可得到同步旋转轴上的磁链方程:
(3)
式中:
(4)
(5)
(6)
(7)
(8)
L0=l0-2m0=ω2(λSσ-2λmσ)
(9)
式中:P,P-1为Park变换中Park矩阵和Park逆矩阵,此时定子的三相绕组已经为等效的dd和qq绕组所取代,是经典的由a,b,c变化到d,q,0的坐标变化。式(7)、式(8)中Ld,Lq分别是定子等效绕组dd和qq的电感系数,成为纵轴同步电感和横轴同步电感。这组方程精确表述了同步电机内部的电磁过程,也是分析的基础。
将十八相永磁同步电机分解为六个三相电机,解决多个三相永磁同步电机及其电机之间的协同控制就成为了十八相电机的控制核心。本文基于多相电机的模型预测控制(以下简称MPC),提出一种条件触发的分层模型预测控制。其基本控制框图如图2所示。
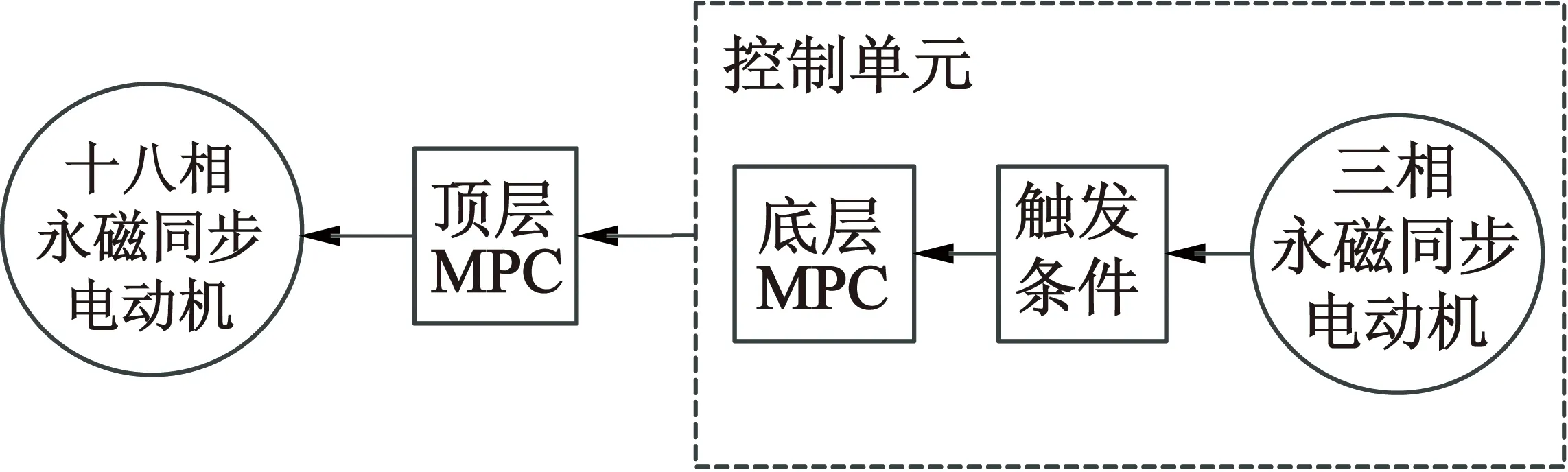
图2 十八相电机基本控制框图
多相电机的整体控制可以分为顶层MPC控制单元和底层MPC控制单元,六个控制单元将信号传入顶层MPC中进行预测控制。
2 基于条件触发的底层MPC算法
对于底层的控制单元,基本控制原理如下:对某一时刻的电机转速和定子电流进行测量,采用三相同步电机的数学模型,利用MPC预测不同电压矢量作用下的电机转矩和磁链。选择使目标函数值最小的电压矢量。整体控制框图如图3所示。

图3 电机单元MPC预测控制框图
为减小底层控制单元的计算量,在底层MPC基础上增加触发条件,原理是在系统运行中,将系统状态变量不断输入控制器中进行判断,当且仅当输入的状态变量满足触发条件时,系统执行MPC计算输出序列。这样的触发方式可在保证运行精度的同时,减小系统计算量。原理图如图4所示。

图4 触发器工作原理图
图4中,ξ为控制系统的期望值,x为系统状态变量值,y为系统实际输出值,ω为系统的控制变量。底层模块实施过程中,系统会比较模型输出的预测值和每个采样时刻的采样值之间的差异。当系统所比较的差异百分比大于触发条件时,MPC将触发一轮计算;如果系统所比较的差异百分比未达到触发条件,则丢弃进入算法的状态变量。上述运算中,输入控制器的状态变量是系统综合性能的核心。相应的,系统的变化趋势由相邻采样时间的状态变量差体现,其动态特性则由系统的状态方程反映。因此,相邻采样时间的状态变量差可以用作系统触发条件的另一要素。由此,系统的触发条件可以设计为以下二进制方程形式:

(10)

λ=0表明系统只考虑输出与期望值之间的差异。当λ数值较大时,此时触发方程更加关注相邻变量之间的差值。系统的控制变量表示如下:
(11)
式中:ζ为触发阈值。当系统不满足触发条件时,将不会触发系统的MPC运算,因此,在系统稳定运行或小扰动时,系统的计算量将大大降低。当系统遭遇较大扰动时,其运算量将由采样间隔决定。绘制系统的MPC控制框图如图5所示。
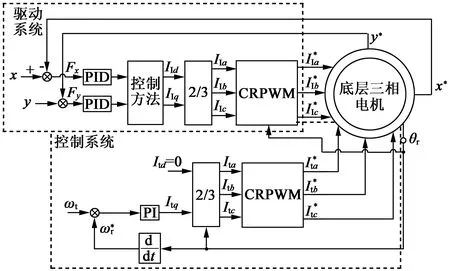
图5 条件触发的底层MPC框图
该算法将目前的输入值和上一个时刻值进行比较,通过计算数据偏移量,进行PID转换后,生成数据的参考值,将其传递。力和电流模块以及条件触发的MPC模块分析变化量和原始值,以确定是否触发MPC。当MPC被触发时,MPC算法被引入,以预测下一时刻的数值,来校正输入的控制变量,从而实现电机的稳定运行。
3 基于输入排序法的顶层MPC算法
当顶层控制采用MPC控制策略时,可以得到电机的转矩:
(12)
式中:Te为电机电磁转矩,p为极对数。结合电机的运动方程式可以得到:
(13)
式中:TL为负载转矩,J为转动惯量。
(14)
对转速进行二阶不考虑余相扩展,可以得到:
(15)
一方面,组织自身具体操作化为组织成立背景、组织定位、组织结构、组织资源四个方面。本研究举例了组织成立的四种不同背景,即香港背景、高校背景、民间背景以及混合背景(香港+高校),研究发现不同背景的社工组织对组织自身存在和日后发展的定位存在着很大差异,同时在组织内部人员分工和构成、所能够掌握和获得的内外部资源都有很大不同。这里需要说明的是,并非某一特定组织背景一定搭配某种组织定位、结构和资源,在现实情况中往往要复杂得多。

(16)
在上层的控制策略中,由前面的解耦可以得到,各个三相电机单元的定子绕组是并联相连接的,因此有:
整合上述各式,有:
(17)
因此,由拉格朗日计算可以得到采样时刻的电流数值:
(18)
对经典MPC,算法有限控制集中所包含的控制元个数为MPC算法的滚动优化次数。在顶层MPC控制中,当底层所有触发器均工作时,输入到顶层的信号达到最大值。此时,顶层MPC的开关状态有26=64种,因此,在经典MPC运算中,运算量依旧很大,有必要对上述的滚动优化策略进行进一步的简化。当顶层MPC开关状态量不再通过MPC算法,而是通过信号排序法进行实现时,MPC控制算法的控制单元也由原来的每个底层模块的工作状态和整体全局最优上转变为子模块单元中处于“激活”状态的子模块个数,且可以对任意时刻激活的状态量进行排序。选取前N个值输入顶层中,这样在电机高速转动时可以显著限制计算量。不管底层模块需对多少变量进行控制,通过筛选,都可以将顶层MPC单个采样周期内优化的次数限定在2次或者3次,从而使得顶层的控制策略不再受到底层输出的限制。其流程框图如图6所示所示。
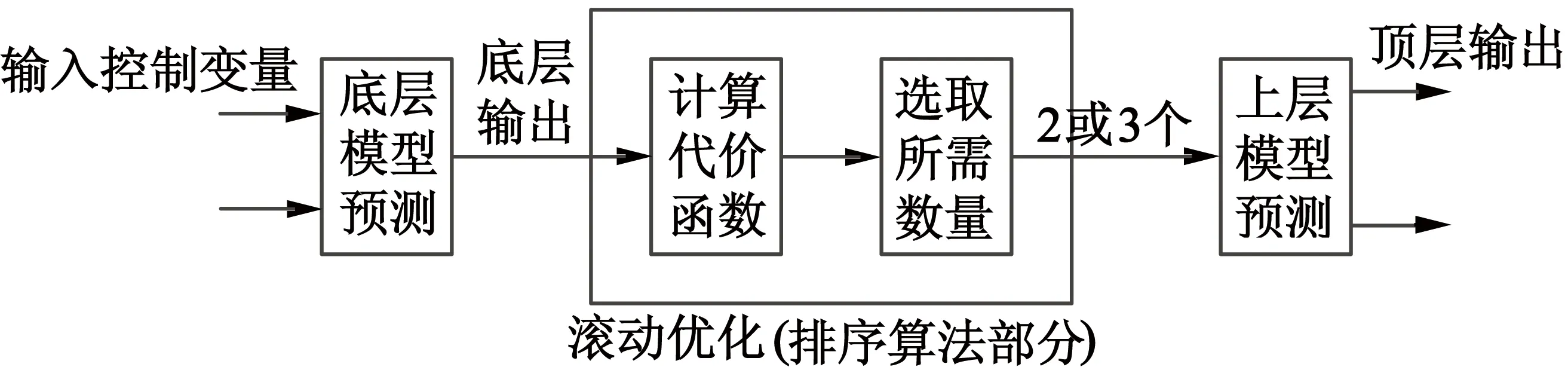
图6 十八相电机整体运行流程框图
上述算法可以根据不同转速的需要,将上层的采样时间设置为秒级,而将底层的采样时间设置为毫秒级,这样可以在减小运算量的同时,维持控制精度。
4 仿真及其结果分析
在Simulink模块中,建立关于多相电机的底层MPC仿真模型。仿真条件:给定十八相电机总转速60 r/min,突然增加负载。观察转子三相波形、转速变化等,如图7所示。

图7 突加负载时,相电流及转速的变化波形
由图7可以看出,当负载突然增加时,通过条件触发的模型预测控制,可以较好地调节电机的转速和电流。所设计的触发模块在保证精度的前提下能够及时响应突变。
图8为稳定运行时的电机电流、转速及转矩波形。可以看出,电流的正弦波形较好。
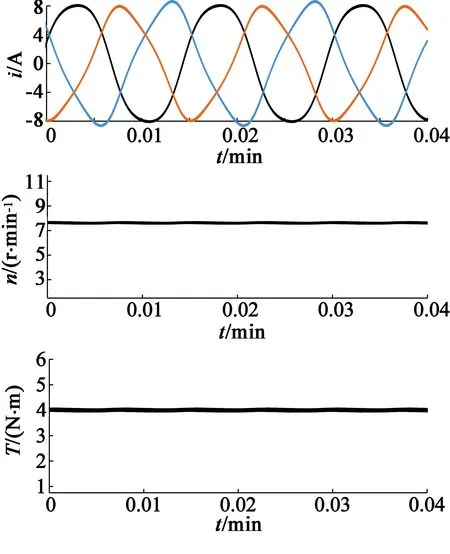
图8 稳定运行时电流,转速及转矩波形
仿真结果表明,本文所设计的基于条件触发的MPC和电机的模块化、分层化设计,可以显著提升多相电机的运行特性,结构简单,响应快速,鲁棒性强。
十八相电机实物平台如图9所示。


图9 实物平台
5 结 语
基于多相电机的固有优点,多相电机将会随着控制策略的优化,更加广泛地应用于低压大功率场合。本文以十八相电机为研究对象,采用电机的模块化设计,便于安装和校正。结合两种改进的MPC控制,采取空间解耦、分层控制策略。底层施加触发条件,在保证精度的前提下能够显著减小运算量。顶层采取电压电流排序输入顶层MPC的方式,最大程度地简化顶层MPC。解决了由传统矢量控制所带来的计算量大的弊端。在仿真实验中取得了较好的控制效果,为多相单机控制提供了新的解决方案。
