基于深度学习的车辆识别系统设计
2020-05-25王瀚唐岚
王瀚 唐岚

摘 要:本设计针对无人驾驶中目标识别问题,设计了一种基于深度学习的车辆识别系统。该系统一共包括三大模块,分别是图像采集模块、图像预处理模块和图像识别模块。其中图像采集模块以两百万像素的工业摄像头为核心对图像进行采集。图像预处理模块包括图像增强、图像去噪、模糊图像复原。图像识别模块以深度学习为核心对车辆进行识别。通过相关算法对质量下降的图片进行有效处理提高图片质量,本文构建的基于深度神经网络的模型可以对图像中的车辆进行有效识别,具有一定的实际价值。
关键词:深度学习;图像预处理;图像识别;试验验证
随着新一轮科技和产业革命兴起,智能技术已经渗透到人们日常中,自动驾驶作为智能化和网联化发展的高级形态,成为汽车行业竞相角逐的阵地,同时人工智能在功能和应用方面的突破性进展将推动汽车行业新一轮发展。
1 基于深度学习的车辆识别系统设计
基于深度学习的车辆识别系统中系统设计方案如下所示。该系统由图像采集,图像与处理,以及图像识别三个模块组成。
1.1 图像采集模块
本文实验所涉及到的设备有实验相机和实验车辆。根据实际情况使用了工业摄像头作为本次实验的图像采集传感器。
1.2 图像预处理模块
1.2.1 图像增强
在对图像拍摄、传输以及显示的过程中,由于成像设备、传输系统或显示系统的原因,以及周围环境的影响最终造成图像退化和质量下降。由于造成图像质量下降的原因十分复杂,所以本文基于车辆识别中所遇到的常见现象,采用了基于直方图均匀化的算法对图像进行了增强,该方法算法简单且适用范围广,在图像增强、光照补偿、图像去雾等方面取得很好的效果[1],可以让图片达到更加清晰的效果,从而提高车辆识别的准确率。
1.2.2 图像去噪
本文选定高斯滤波模板大小:5×5,σ2=0.2,u=0;利用二维高斯离散函数计算高斯模板内每个小窗口的高斯滤波权重值;计算高斯模板窗口内每个点的像素值乘以权重系数后的和,然后用该值替换中心点像素值,最后输出图像。
1.3 图像运动复原
在目标与相机在曝光时间内产生相对运动引起成像模糊,使图像中原本锐利的边缘退化成拖影,运动模糊的图像会直接影响图像关键信息的获取[2]。所以为了准确识别物体,对图像进行运动复原是很有必要的。针对车辆识别实际任务,本文采取了以傅里叶变换[3],Radon变换[3]为核心的运动模糊复原对图像进行复原处理。该算法对模糊图像的处理效果明显,基本达到了预期的效果。
2 图像识别模块
自动驾驶核心之一就是如何对图像中车辆的特征进行有效,准确的提取,并让计算机通过提取的特征来识别目标[4],从而实现对周围环境的目标识别,识别和避障,实现无人驾驶目的。本文主要介绍基于卷积神经网络的特征提取方法。
2.1 深度神经网络模型的训练
神经网络的训练。本文采用的是随机梯度下降算法[5],将神经网络模型的训练过程则转化成一个寻找最优的过程,通过定义模型的损失函数,在一定的约束条件下寻找使得该模型损失函数达到最小值的参数,本文中设定交叉熵函数[6]为该模型的损失函数,找到的这个参数即为神经网络中神经元的学习权重,其原理及流程如下所示:
在神经网络模型训练时,采用参数前馈传播来寻找损失函数的极小值来更新模型的参数,当损失函数达到全局最小值的时候,模型的准确率就到达最大值,接下来就利用有关算法寻找损失函数的全局最小值,本文使用了随机梯度下降算法。
2.2 样本识别
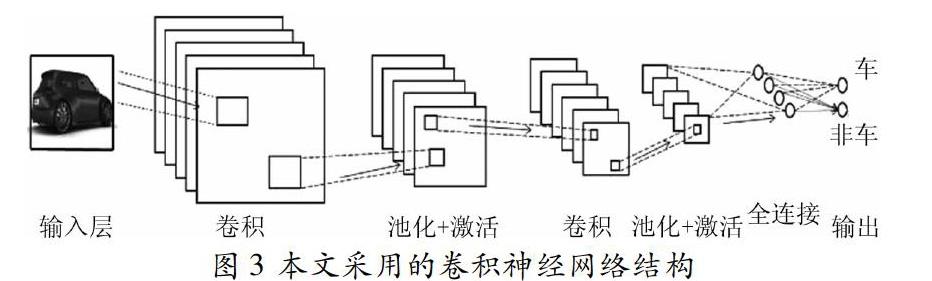
2.3 深度神经网络的搭建
在迁移学习的基础上本文采用的是AlexNet网络结构根据本文实际任务搭建模型及设置各层参数如下:
3 实验工况
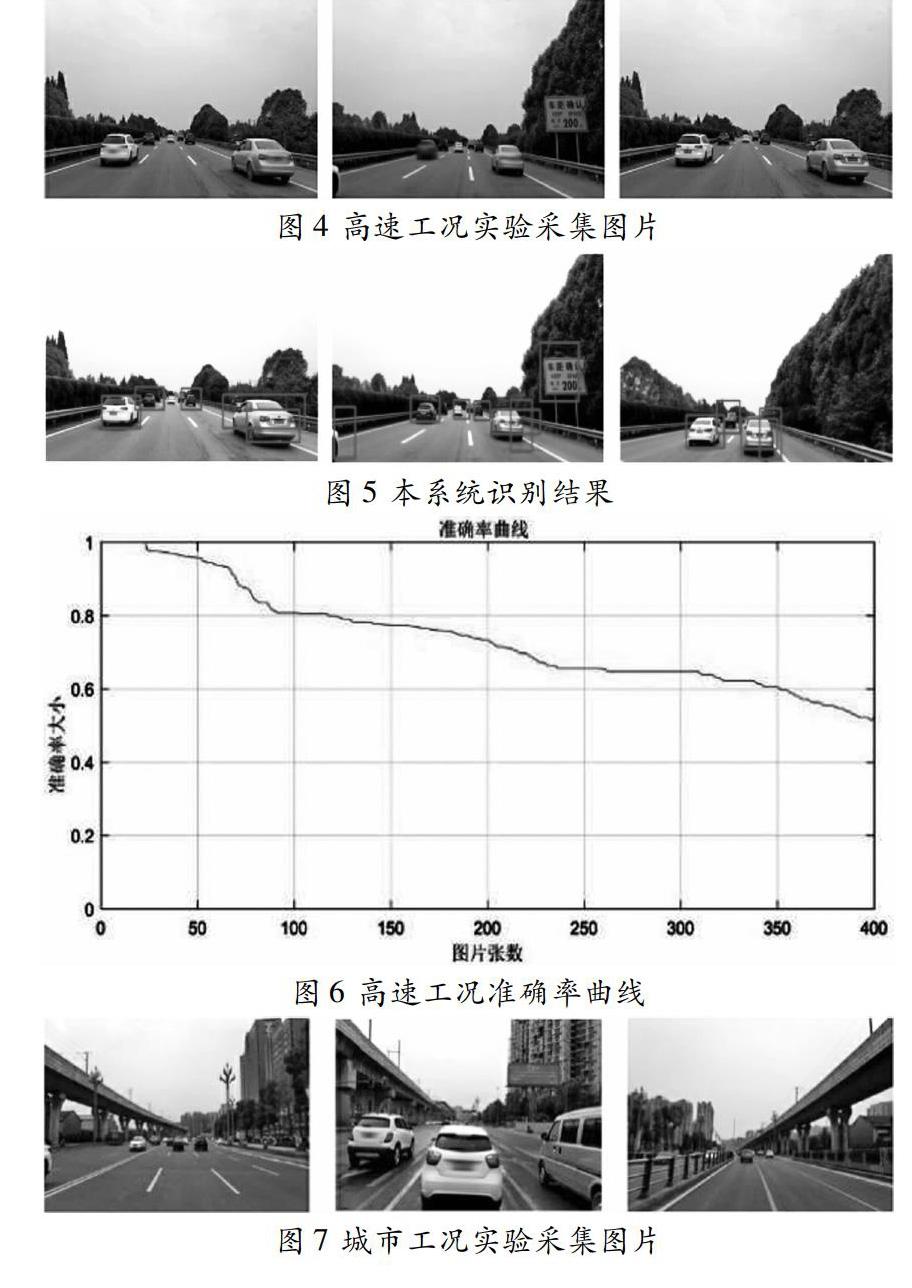
为了验证系统的准确性,本文在一些常见工况下进行实验,包括视野较好,基本无车辆相互遮挡,单向行驶的高速公路工况(都江堰至郫县红光路段);视野较差,车辆相互遮挡情况严重以及存在建筑物干扰的城市工况(西华大学南门至犀浦路段)。采集图像信息如下:
对实验中采集到的每张图片进行人工标注,即标注图片中所要识别的车辆。该方法借助MATLAB中training Image Labeler工具箱完成。
4 實验结果
高速路工况和城市工况下准确率与平均召回率大小如下所示:
5 总结
根据以上实验结果可以得知,在高速路工况和城市的识别准确率和召回率都大于60%。高速路工况的准确率与召回率皆高于城市工况下的准确率与识别率。进一步分析可以得出,由于高速路工况下的车辆全部为单向行驶,车辆间的相互遮挡现象也比较少,在对车辆进行识别时,被识别的车辆属于背向试验车辆,因此特征较为明显,模型准确率与召回率较高;相反在城市工况下的试验车辆,由于工况复杂,在采集图片时容易受到车辆间的相互遮挡影响,从而造成车辆特征提取较弱,另外在城市工况下存在大量同向行驶的车辆以及停放在路旁静止的车辆,因此对于被识别车辆而言特征太多导致模型的准确率与召回率低于高速工况。但是整体而言,本实验所采用的模型依然具有一定的实际运用价值。
参考文献:
[1]王超,孙玉秋,徐石瑶,余美晨,李祖胜.自适应直方图均衡图像增强算法研究[J].长江大学学报(自科版),2018,15(01):55-59+7.
[2]陈文静,苏显渝,曹益平,向立群.傅里叶变换轮廓术中抑制零频的新方法[J].中国激光,2004(06):740-744.
[3]张强,李嘉锋,卓力.车辆识别技术综述[J/OL].北京工业大学学报,1-11.
[4]夏鹏飞.基于HOG的多特征融合行人识别跟踪系统[D].南昌航空大学,2017.
[5]靳冬欢.基于随机并行梯度下降算法的波前校正技术研究[D].国防科学技术大学,2006.
[6]Anon.Unsupervised Search-based Structured Prediction[J].Advances in Neural Information Processing Systems,2015.
作者简介:王瀚(1992-),女,四川成都人,硕士,从事无人驾驶方面的研究。
