采用改进单神经元PID控制的机床运动平台误差研究∗
2020-05-25许云兰
许云兰
(西安职业技术学院机电工程学院 西安 710054)
1 引言
随着现代科技的迅速方法,数控加工技术已经成为国家制造业发展水平的重要标志。数控机床具有加工精度高、生产效率高级工人劳动强度低等许多优点,广泛应用于汽车、医疗、航天及海洋等许多领域[1~2]。国外的数控技术一直处于领先地位,赶上并超越国外数控技术是我国机床未来发展的主要方向。目前,数控加工机床技术比较有代表性的是X-Y 运动平台轮廓跟踪控制,运动平台控制精度是数控加工精度的重要评价指标,实现对机床轮廓跟踪控制变得非常重要。机床X-Y 运动平台在加工过程中,由于X 轴和Y 轴由两台电机驱动,若两轴中有一轴存在较大的误差,就会导致整个加工误差增大。因此,设计优良的控制系统,提高机床加工轨迹跟踪精度,对于促进数控机床的发展尤为重要。
随着产品精度的要求越来越高,人们对数控机床加工精度也提出了更高的要求。为了加快数控机床的发展,科研人员从不同角度对机床加工误差进行了研究。例如:文献[3~4]研究了隔振条件下数控机床运动轨迹误差补偿控制方法,设计了隔振下的轨迹修正算法,通过驱动闭环函数预测机床轮廓误差,通过XY运动平台进行跟踪实验效果,从而减小机床轮廓误差和震荡情况。文献[5~6]研究了五轴联动数控机床轮廓误差补偿控制方法,建立双转台五轴机床运动模型,给出机床轮廓误差计算数学模型,设计两选择轴位置控制器,通过仿真验证机床轮廓误差补偿控制效果,从而有效地提高机床轮廓运动精度。文献[7~8]研究了数控机床加工的模糊PID 控制方法,分析了机床组成结构和电液伺服控制系统,引用传统PID 控制方法并进行改进,设计了模糊PID 控制方法,通过MATLAB 对机床伺服控制响应进行仿真,从而提高控制系统的稳定性和响应速度。但是,以往研究的数控机床运动平台容易受到环境的干扰,造成运动平台轨迹跟踪误差较大。对此,建立机床X-Y 运动平台简图模型,推导出机床运动轨迹跟踪误差方程式。对传统PID控制器进行改进,设计了改进单神经元PID 控制方法,在复杂环境中,采用数学软件Matlab 对机床运动平台跟踪误差进行仿真,并与改进前输出误差形成对比和分析,为提高机床平台运动轨迹跟踪精度提供参考依据。
2 机床加工平台数学模型
2.1 机床平台数学模型
机床平台采用永磁直线同步电动机驱动X-Y轴,X-Y平台采用相互垂直的X轴和Y轴组成,如图1所示。
针对X-Y轴驱动的永磁同步直线电动机,设置两个坐标轴分别为d 轴和q 轴,运动平台电压和磁链方程式分别为式中:ud、uq分别为d 轴和q轴电压;ψf为永磁体的励磁磁链;ψd、ψq分别为d轴和q轴磁链;Rs为动子相电阻;Ld、Lq分别为d轴和q轴电感;id、iq分别为d轴和q轴电流;ωr为转子角速度。
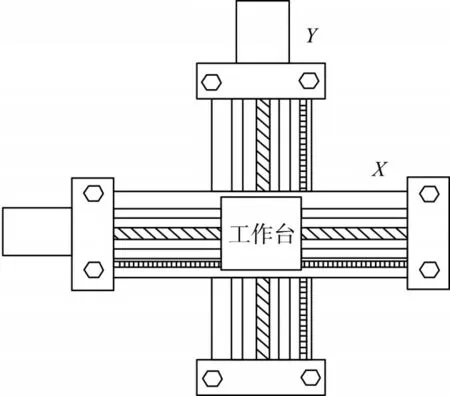
图1 跟踪误差平面简图
根据电机原理[9]可以推导出:

式中:Fe为电磁推力;τ为永磁体极距。
若id=0,则电磁推力为

式中:F 为控制系统扰动力;m 为电机负载质量;v为电机速度。
令x(t)和v(t)为系统状态变量,则系统状态方程式为
式中:u 为控制系统输入信号;x(t)和v(t)分别为系统输出位置和电机运动速度。
因此,机床运动平台的数学模型可以采用二阶微分方程式表示如下:

式中:下标1 和2 分别为X 轴和Y 轴;u1、u2分别为电流控制输入;Kf1、Kf2为推力系数;m1、m2为负载质量;F1、F2为外部扰动力。
2.2 运动轨迹误差
驱动X-Y轴平台运动数学模型[10~11]为
式中:x1和x2分别为X、Y 轴输出位移;frx、fry分别为X、Y轴摩擦力。
机床加工误差由轮廓误差和切向跟踪误差两个部分组成,其误差状态变量如下:

式中:εc为轮廓误差;εt为切向跟踪误差。
3 改进神经网络PID控制
3.1 单神经元PID控制
单神经元PID 控制通过对加权系数的设置和调整,从而实现自适应和自组织功能,其控制结构如图2所示。
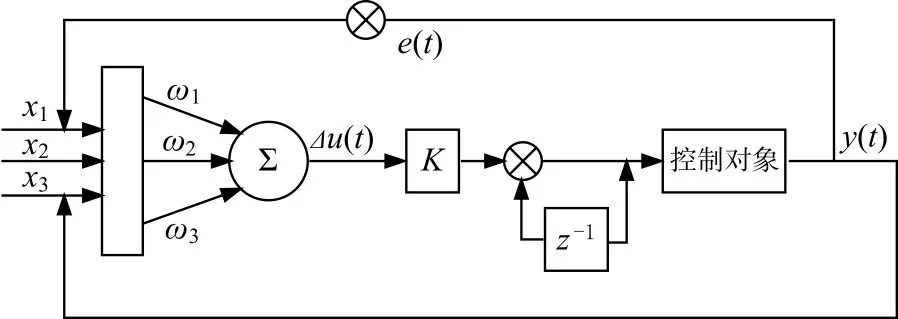
图2 单神经元PID控制
在图2 中,ω1、ω2和ω3为加权系数,K 为单神经元增益,神经元对加权系数进行在线调整,从而改变PID 控制的比例、积分和微分系数。通过比例、积分和微分系数的组合,完成被控对象的控制,其控制规律[12~13]为

式中:kp为比例系数;ki为积分系数;kd为微分系数。
3.2 改进单神经元PID控制
在图2 中,xi、ωi分别为神经元输入和输出的连接权值,该控制系统权值所对应的向量式为

式中:X=(x1,x2,x3)为输入向量权值;W=(ω1,ω2,ω3)为输出向量权值。
神经元控制器输出方程式为

PID 控制输出主要是对e(k)e(k)进行在线修正,其改进后的PID控制算法[14~15]如下:
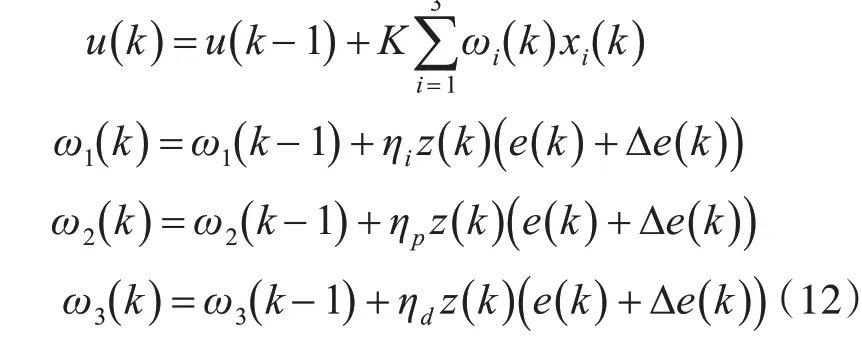
式中:Δe(k)=e(k)-e(k-1),z(k)=e(k)。
3.3 选择参数
1)对改进单神经元PID 控制的阶跃响应,应该采取下列措施,若输出超调量较大,并且出现多次正弦衰减现象,则减小K 值,并且保持ηi、ηp、ηd值不变;若超调量较小,并且上升时间较长,则增大K值,并且保持ηi、ηp、ηd值不变。
2)针对控制系统阶跃输入,若被控对象出现衰减次数较多,则较少ηp值,并且其它参数值保持不变。
3)若被控对象响应超调量增大、上升时间缩短,则应该减少ηi值,其它参数维持不变;若被控对象上升时间变长,增大ηi值后,超调量变大,则可以适当增大ηp值,剩下参数维持不变。
4)开始调整时,选择较小的ηD值,当调整ηi和ηp值和K,使控制对象获得较好的特性时,再增大ηD值,并且保持其他参数不变,会使系统输出更加稳定。
4 误差与分析
为了验证机床平台运动轨迹控制输出误差,采用Matlab软件对机床平台运动跟踪误差进行仿真,仿真参数设置如表1 所示。假设运动路径为x1=0.08sinπt,x2=0.06sinπt,在无波形干扰环境中移动,其跟踪误差分别如图3、图4 所示。假设在正弦波形x=0.08sinπt 干扰环境中移动,其跟踪误差分别如图5、图6所示。

表1 仿真参数
对比图3、图4 可得,采用传统PID 控制方法,机床运动平台跟踪轮廓误差和切向误差分别在[-3um,3um]和[-2um,2um],而采用改进单神经元PID 控制方法,机床运动平台跟踪轮廓误差和切向误差分别在[-3um,3um]和[-2um,2um]。因此,在无干扰环境中,采用传统PID 控制和改进单神经元PID 控制方法,控制系统输出误差相差不大,都能较好完成机床运动平台运动轨迹跟踪任务。对比图5、图6 可得,采用传统PID 控制方法,机床运动平台跟踪轮廓误差和切向误差分别在[-7um,7um]和[-6um,6um],而采用改进单神经元PID 控制方法,机床运动平台跟踪轮廓误差和切向误差分别在[-3um,3um]和[-2um,2um]。因此,在有干扰环境中,采用传统PID 控制系统,输出误差较大,而采用改进单神经元PID 控制系统,输出误差较小。因此,采用改进单神经元PID 控制方法,能够抑制正弦波形的干扰,从而提高机床运动平台轨迹跟踪精度。
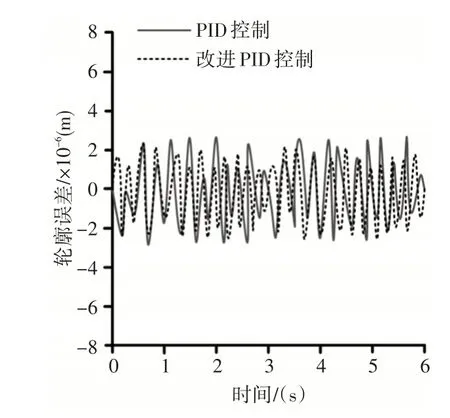
图3 轮廓误差(无干扰)

图4 切向误差(无干扰)
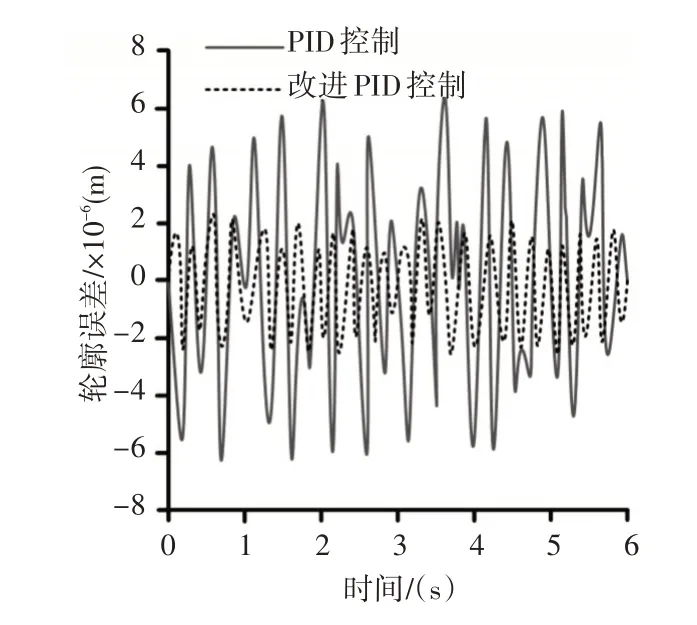
图5 轮廓误差(有干扰)
5 结语
针对机床运动平台轨迹跟踪输出误差较大问题,采用改进单神经元PID 控制方法,并对轮廓误差和切向误差进行仿真,主要结论如下。
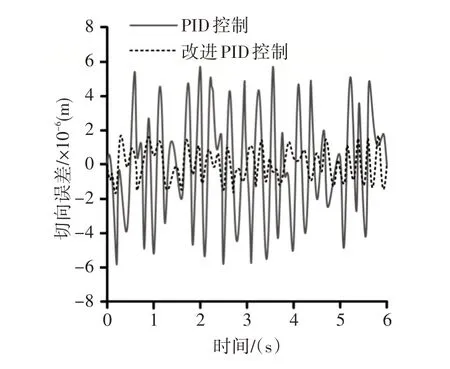
图6 切向误差(有干扰)
1)机床运动平台在无干扰环境中移动时,采用传统PID 控制方法和改进单神经元PID 控制方法,其输出误差范围相差不大,误差变化幅度较小。
2)机床运动平台在有干扰环境中移动时,采用传统PID 控制方法,输出误差范围较大,误差变化幅度较大,而采用改进单神经元PID 控制方法,输出误差范围较小,误差变化幅度较小。
3)采用改进神经元PID 控制方法,能够抑制外界波形对控制系统的干扰,不仅可以用于机床运动平台的控制,而且为其他领域控制提供了参考依据。
