故障树分析法在光电经纬仪故障诊断中的应用研究∗
2020-05-25朱江山李大伟
朱江山 李大伟
(91351部队 葫芦岛 125106)
1 引言
光电跟踪测量系统中应用的技术大多具有控制状态多、控制变量多、控制耦合强等特点,这加速了光电经纬仪电控系统的发展。电控系统可以提高经纬仪性能,提高经纬仪控制精度,实现经纬仪实时跟踪测量能力,数据实时监控和传输能力,提高系统的稳定性。电控系统作为经纬仪的重要组成部分,与光机系统、数据传输系统及配套系统一起实现对目标的稳定跟踪并获取目标的航迹、速度、加速度等信息。电控系统的准确、稳定工作会影响经纬仪的伺服系统跟踪稳定性和测量精度。
随着光电经纬仪技术的不断发展与运用,电控系统的复杂性也在不断增加,系统的高度复杂带来了一系列的装备可维护性问题。在装备使用过程中均可能由于电控系统的设计缺陷,尤其是长时间、高负荷工作前提下,如何快速定位并解决系统故障成为面临的一个重要挑战。
故障树分析(Fault Tree Analysis,FTA)方法作为一种分析系统可靠性的数学模型,在长期的工程实践过程中逐步形成比较完善的系统可靠性分析技术。将故障树分析法引入光电经纬仪故障诊断过程,以帮助使用及维护人员理清故障发生机理内在联系、增强故障定位过程的针对性、缩短故障定位时间,提升排故效率。
2 故障树分析原理简述
故障树模型是一种基于研究对象结构、功能特征的行为模型,是一种定性的因果模型。树根被称之为顶事件,顶事件是系统最不希望发生的事件,顶事件的发生必须要能找到原因;树叶被称之为底事件,底事件是可能导致顶事件发生的原因。故障树模型是通过逻辑门将顶事件、底事件、中间事件建立关联关系的一种倒树状结构的逻辑图。
故障树分析法一般分为两种,即定性分析与定量分析。定性分析主要是对顶事件产生的原因和过程进行分析;故障树定性分析主要用于定位故障、排查系统隐藏的故障事件。定量分析主要用于对顶事件建立故障树,获取各底事件、中间事件的逻辑关系,并依据各底事件发生的概率计算出顶事件发生的概率;故障树定量分析方法主要用于系统的可靠性研究。
本文采用故障树的定性分析思路分析某光电经纬仪出现方位抖动的异常。故障树分析法是按照树形结构,从故障现象着手,基于异常现象逐级细化、逐级推导,直至所有级的原因不能再被进一步细分;再通过层层分析可以梳理出顶事件、中间事件、底事件之间的逻辑关系,再逐个分析检查所有底事件,得到具体由哪个底事件导致顶事件的发生,从而定位到具体底事件,完成故障定位。
3 故障树分析方法实例化
3.1 问题现象
某光电经纬仪在使用过程中发现在某角度区间方位出现“抖动”,操作人员无法操纵单杆跟踪目标。离开该角度区间后单杆工作正常。引起光电经纬仪“抖动”的原因主要有伺服控制分系统和编码器分系统。而角度信息完全由经纬仪编码器分系统给出,由此得出结论:方位编码器工作出现异常。
3.2 背景介绍及原理分析
光电经纬仪是一种集光机电技术于一体的测量设备,具有跟踪捕获、实时测量、实况录像和图像再现等功能,是我国各试验靶场广泛使用的高精度定位测量设备,在飞行试验中运用于飞机、导弹、外挂物投放的轨迹、姿态测量以及无线电外测设备的精度鉴定。
1)伺服控制分系统分析
光电经纬仪伺服控制分系统电路结构图如图1 所示。伺服控制分系统的控制方式采用双闭环控制结构,内环为速度环,外环为位置环。光电轴角码器作为该系统的速度和位置反馈元件,单杆、引导信息、电视脱靶量作为该系统的速度和位置给定,构成一个完整的闭环伺服控制系统。

图1 伺服控制系统电路结构图
速度反馈用来检测系统的速度,它通过对编码器的数据进行差分并滤波后得到。速度调节器是根据测出的被控对象传递函数而精心设计的,目的是希望提高系统的快速响应性,并降低系统的扰动误差;位置调节器是根据速度回路闭环的等效传递函数来进行设计,其目的是提高系统的跟踪精度和跟踪稳定性。
2)光电轴角编码器分系统分析
光电轴角编码器工作原理如图2 所示。当光电经纬仪开始工作时,编码器分系统接收主控系统的控制命令,完成系统的自检,并将自检数据回送给系统。在采样同步脉冲信号作用下,编码器光电信号通过精码差分放大电路和中精码放大电路整理后,经A/D 模数转换电路进行A/D 转换,将精码、中精码和粗码角度信息转换成数字量。DSP 数据处理电路对角度信号进行细分、校正、对径误差修正,形成二进制角度代码,通过输出接口电路,串行输出给光电经纬仪和OLED显示单元。

图2 光电轴角编码器原理图
3)跟踪方式切换
当单杆操作手选择“单杆”和“数引”跟踪方式时,机下控制台的视频图像出现“抖动”现象;跟踪方式切换到“捕获”、“测量”、“长波”、“中波”或“融合”时,锁定目标被迅速拉到电视靶面中心,并且跟踪稳定。经上述排查,初步断定故障原因可能是方位编码器故障。
4)方位编码器检查情况
(1)缓慢转动光电经纬仪的垂直轴,观察电路板LED 指示灯变化情况,发现故障指示灯“D3”时亮;
(2)检测方位编码器各码道信号。如表1 所示。从表1 可以看出,精1 读数头和精2 读数头各信号的波形及幅值正常;粗读数头A1~A12放大器幅值均低于2V(理想状态为5V、一般不能低于2V),经调整后没有变化或变化不大,可能是照射到粗码区的光能量下降。
(3)卸下灯源,白炽灯表面变黑。
3.3 故障树建立

图3 经纬仪方位‘抖动’故障树分析图
根据故障树分析方法,把故障现象即“经纬仪方位‘抖动'”作为故障树的顶事件、再基于3.2节中的故障原理分析,判读出是伺服控制系统出现问题,还是编码器系统出现问题。据此层层向下追溯,层层向下分析,直至原因不能继续分解为止,确定所有的中间事件与底事件。据此绘制出“经纬仪方位‘抖动'”故障树分析图(见图3)。故障树分析过程共识别5 个中间事件、6 个底事件。分析得到底事件中任何一个发生,均会引起顶事件的发生。所以要定位顶事件发生的原因,只需要逐个分析底事件是否会发生。
基于梳理出来的8 个底事件,对各个底事件进行逐一分析。
1)精码信号问题。精码信号的调试,选择示波器合适测量档位(选择2V 档),打开编码器光源开关。以调试SINq 为例,示波器输入探头测量差分放大器的输出测孔SINq,分别调节底板上G0°与G180°两个电位器,使差分放大器输出的正弦波电压±4V(峰峰值),要求正负幅值对称相等。G90°与G270°、G0°′与G180°′、G90°′与G270°′信号调试方法与G0°与G180°调试方法相同,输出测孔分别是SINq、COSq、SINq′、COSq′。精码信号如图4 所示。通过示波器测量输出的正弦波来看,虽然波形达到饱和,但是幅值偏低,只有2V,进一步调整电位器,依然无法使正弦波达到4V,这进一步说明精码信号存在问题,但已经无法通过调整电位器来调整精码信号,只能通过检查编码器灯源来确认是否为灯源故障引起精码信号幅值偏低。
2)中精码信号问题。中精码信号的调试,选择示波器一路输入开关置向“GND”,调整示波器旋扭,使水平扫描线与适当位置作为中精码信号调试基准线,中精码信号调试过程中要始终保持这条基准线不动。以调试中精码G5 为例,用测量通圈信号的探头测量放大器输出测孔G5,然后调节G5 电位器,使得中精码输出信号的幅值临界饱和。如图5 所示。F1、F2、F3、J1、J2、G5′、F1′、F2′、F3′、J1′、J2′信号调试方法与G5 信号调试方法相同。G5、J1、J2、G5′、J1′、J2′近似正弦波,F 码近似为梯形波,如图6 所示。通过示波器测量输出的近似正弦波来看,虽然波形达到饱和,但是幅值偏低,只有2V,进一步调整电位器,依然无法使正弦波达到4V,这进一步说明中精码信号存在问题,但已经无法通过调整电位器来调整中精码信号,只能通过检查编码器灯源来确认是否为灯源故障引起中精码信号幅值偏低。
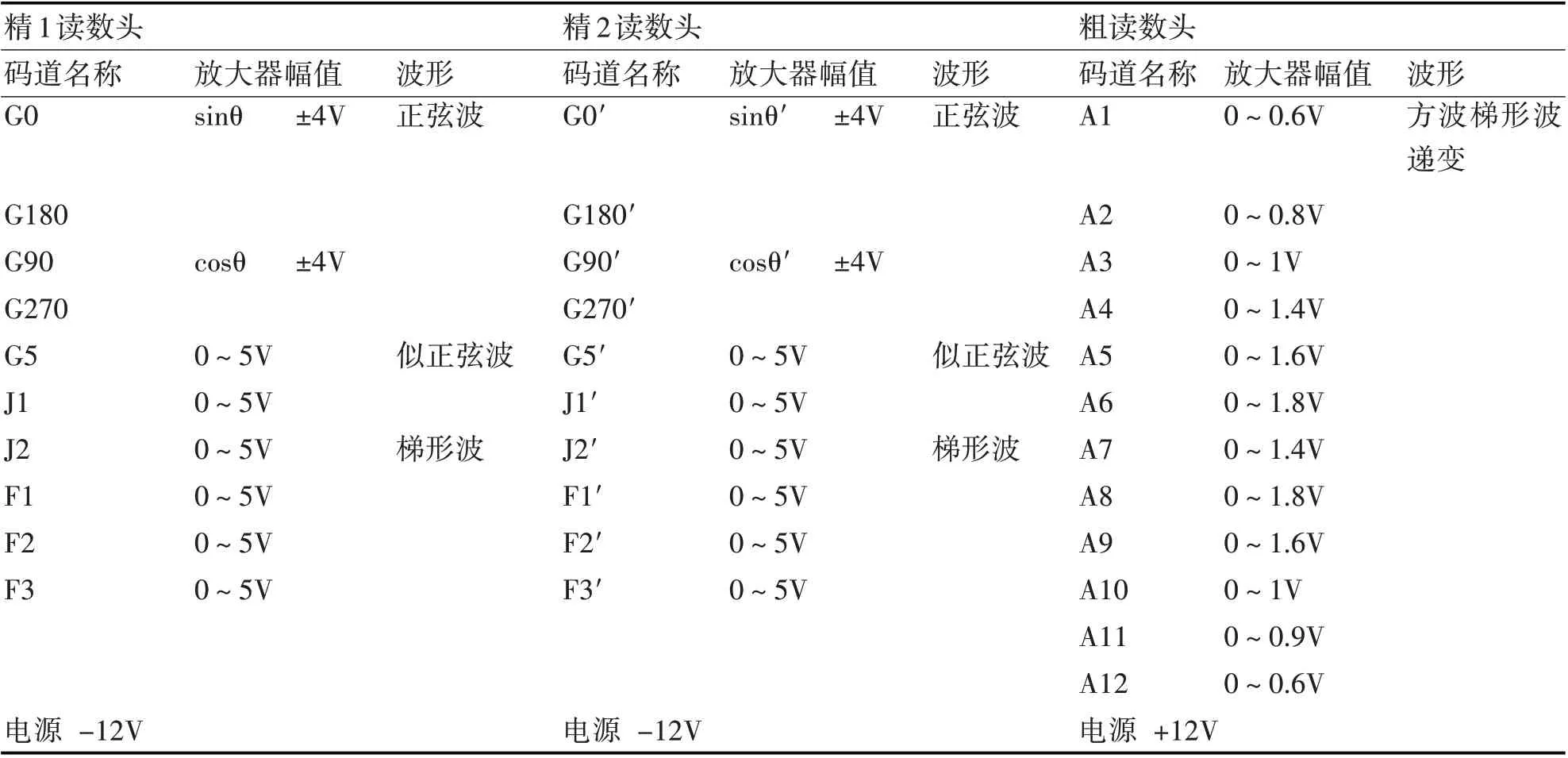
表1 方位编码器码道信号实测数据

图4 精码信号波形
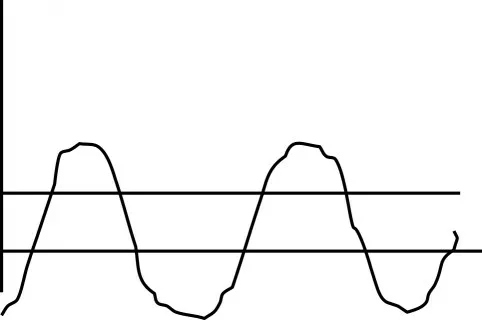
图5 G5、J1码近似正弦波

图6 F码近似为梯形波
3)粗码信号问题。粗码信号的调试,粗码输入信号来自编码器头部光电接收器,粗码信号波形为方波或梯形波,从A1 至A12 共计12 路,如图7 所示。由于采用软件自动设定比较电平,不使用统一的比较电平,而且粗码信号的离散性低,故不使用电位器来调节各路信号,只用放大器将码道信号放大成为高于4.8V 的电压信号。大大提高了电路的可靠性,也减小了调试信号的复杂程度。通过示波器测量粗码信号,发现粗码信号幅值偏低,只有2V左右,但粗码信号无法通过电位器调整,通过软件进行整定,幅值依然偏低,只能通过检查编码器灯源是否正常来确认原因。
4)灯压偏低问题。通过万用表检查点灯电源电压,发现灯压正常,幅值为4.2V。排除灯压偏低问题。
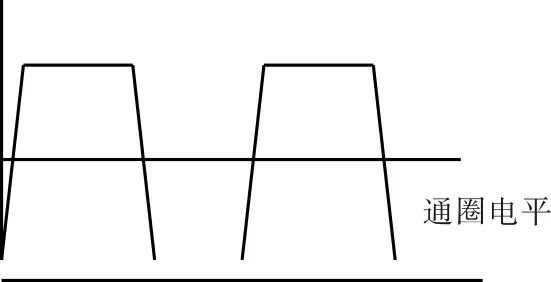
图7 粗码放大器输出波形
5)灯源损坏问题。打开位于经纬仪中部的方位编码器灯源,检查发现灯泡局部发黑,发出的光势必减弱,光电转换时不能满足各码道所需要的光强,因此造成各码道信号幅值偏低。进而导致方位编码器进位不正常或出现错码。因此把灯源问题确定为可疑底事件。
6)单杆跟踪存在问题。由于采用单杆跟踪过程中并不是所有方位角都出现抖动,因此不是单杆跟踪存在问题。排除单杆跟踪存在问题。
7)数引跟踪存在问题。当采用数引跟踪时,数据不稳定也会导致经纬仪出现“抖动”,但由于跟踪过程中并没有采用数引跟踪,因此排除数引跟踪问题。
8)自动跟踪存在问题。当采用自动跟踪时,如果波门不能稳定锁定目标,经纬仪也会出现“抖动”,但由于跟踪过程中并没有采用自动跟踪,因此排除自动跟踪问题。
通过分析,灯源故障是造成编码器系统工作出现异常的重要原因,基本说明伺服系统工作是正常的。基于故障树分析法对故障原因进行分析,定位为方位编码器灯源损坏问题。
3.4 结论
利用故障树分析法完成了某经纬仪方位“抖动”故障的故障分析过程,确定了故障发生的原因,即编码器灯源损坏问题。由于经纬仪使用频率高、时间长,导致编码器灯源使用时间缩短,所以应该定期检查并及时更换。
4 结语
基于故障树的定性分析法,对故障树顶事件进行层层分析、直观地展示了各底事件与顶事件的逻辑关系、快速定位并解决了光电经纬仪出现方位抖动的系统故障问题。将故障树分析方法引入光电经纬仪方位抖动故障诊断及定位过程,有助于提高问题定位的效率,提升装备的可维护性。这对光电经纬仪故障定位具有借鉴意义。
