无线传感器网络协作节点船舶位置检测∗
2020-05-25潘永安
赵 陇 潘永安
(1.江苏省电子产品装备制造工程技术研究开发中心 淮安 223003)(2.淮安信息职业技术学院 淮安 223003)
1 引言
海上入侵检测是港口保护、边境安全和商业设施保护(如石油平台和渔业设施)的一个重要问题[1]。广泛使用的船舶监测方法是使用昂贵的雷达或卫星,但卫星云图不仅成本高,而且容易受到云层的影响。同时,海面复杂环境也会干扰海洋雷达,利用雷达很难探测到海上的较小的船舶。因此,与使用雷达与卫星相比,使用无线传感器网络(WSN)可以有效降低监测成本。
在海上部署传感器的难度主要在于海浪的影响,海洋中部署的传感器被海浪抛掷,这使得它们是随机移动的[2]。节点的随机移动使得大多数传感器难以检测入侵。为了克服这一困难,我们利用无线传感器网络监测由船舶形成的波浪来代替船舶的监测[3~4]。
2 舰船波与海浪之间的区分
当一艘船穿过水面时,它会产生发散波和横波,如图1 所示。开尔文发现,在深水中,两个尖点的轨迹形成了V型图,其与航线的夹角为19°28′[5],并且,此模型与船舶的大小和速度无关。
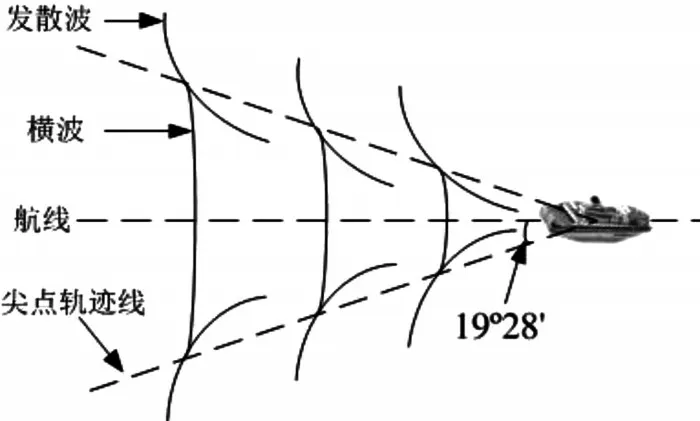
图1 船波模型
本文利用加速度计测量船波的实际运动。当加速度计用于海洋环境时,浮标和加速度计由于海浪作用而经历大致振荡的,类似正弦曲线的垂直加速度。为了区分船舶产生的波浪和海浪,我们使用短时傅立叶变换(STFT)来处理监测到的信号[6~8]。从图2 中,可以观察到船波和正常海浪具有不同的功率谱,图2(a)显示了没有船波的海浪,它的功率谱在1Hz 左右的特征周期内具有明显的峰值。相反,如图2(b)所示,海浪和船波的频谱组合则具有多个峰值。
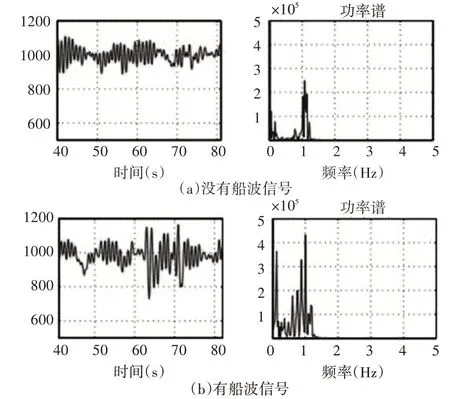
图2 短时傅立叶变换
3 系统模型
本次实验是在海面浮标上部署了四个带有iMote2 的三轴加速度传感器,利用信号处理,可观察到海浪和船舶产生的波浪具有不同的频谱。本文提出了使用四个传感器节点组成的无线传感器网络进行船舶定位的模型[9~10]。当船舶航行产生的发散波干扰传感器时,传感器节点会创建相应的时间戳。根据时间的不同,我们描述了三种情形,即t1>t3、t1<t3和t1=t3。t1>t3表示发散波干扰到传感器sensor3 要早于sensor1,t1<t3表示发散波干扰到sensor1 要早于sensor3,t1=t3表示发散波同时干扰sensor1 和sensor3。设(x,y)为船舶坐标,我们证明出x和y 是时间戳和传感器距离的函数,同时推导出一系列计算x和y的中间步骤。
3.1 基于网格的传感器部署
在系统监测的实现中,使用了基于网格的传感器人工部署方法,以便在最佳节点距离内以较少的传感器节点取得实验的成功[11~12],如图3 所示。当船舶穿过正方形的传感器区域时,所产生的波浪依次干扰传感器节点。因此,传感器节点具有不同的时间戳。

图3 基于网格的传感器节点部署
3.2 模型搭建
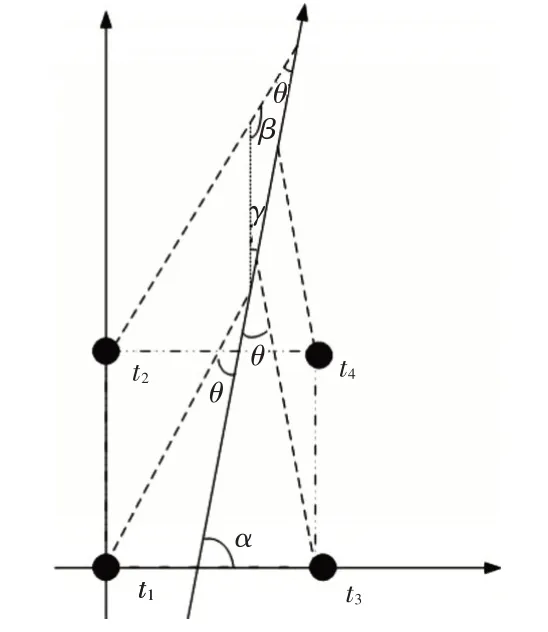
图4 船舶经过4个节点
基于网格的传感器节点部署,可以建立以下模型,如图4 所示,船舶在四个传感器节点间通过,这四个传感器节点构成一个正方形,设节点之间的距离为S,实线箭头表示船舶航线,当船航行时,产生的发散波,用虚线表示。根据文献[5],发散波相对于航线的角度θ=19°28′。因此,我们可以记录发散波干扰各个传感器的时间戳,用时间戳t1、t2、t3和t4分别代表传感器sensor1、sensor2、sensor3 和sensor4。设α为船舶航线与水平方向的夹角,经过干扰sensor1 的发散波作垂直于水平方向的辅助线,γ和β为辅助角,来计算船舶坐标(x,y)。
4 船舶坐标(x,y)的推导
4.1 D和D′ 的比较
船舶可以在sensor1和sensor3之间以任意角度通过。因此,我们需要知道船舶相对于传感器节点的距离,如图5所示。将点A作为船舶航线与t1和t3之间连线的交点,D 为A 到t1的距离,D′ 为A 到t3的距离。当发散波干扰t3时,船到达B′ 点,用ω表示发散波与t3的夹角。当发散波干扰t1时,船到达B点,用δ表示发散波与t1的夹角。利用三角函数,得到:

同理,得到:

进而得到:

船舶可以以任意角α通过点A。这种可能性导致AB有可能等于AB′ 。因此,式(3)换算为

而

此外,如果船到达sensor1 和sensor3 的中间点时,此时α=90°,D=D′。
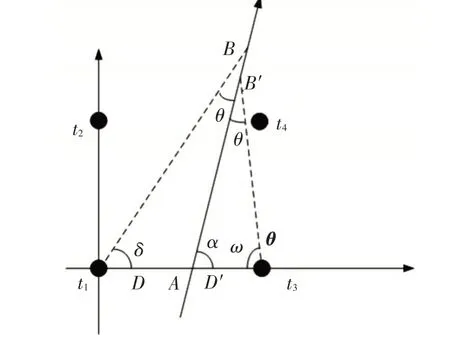
图5 D和D′ 的比较
4.2 D值的推导
本节来推导D 的值。基于时间戳t1和t3,有t1>t3、t1<t3和t1=t3三种情形。如图6所示t1>t3,这表示发散波要更快的干扰到sensor3。在这种情况下,我们应该使用文献[3]中的等式(13)利用t1和t3之间的时差Δt13=|t3-t1|和船速v 来计算P1的距离。得到:

进一步计算P2:

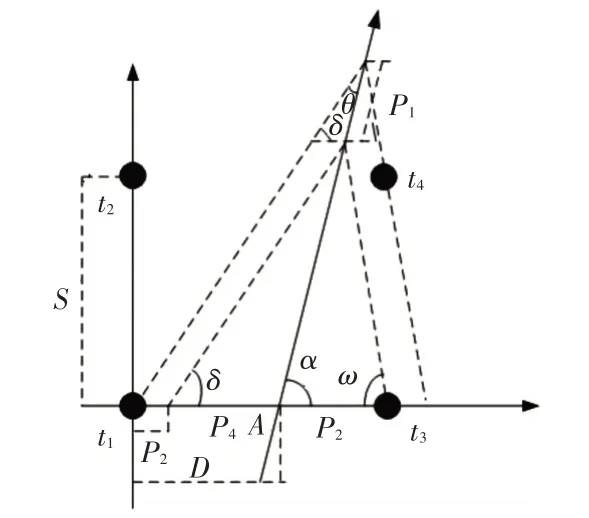
图6 当t1>t3时D的值
从图6 中可看出p4+p5=S-p2。由式(4),可得出:

由式(9),可以得到:

因为p4+p5=S-p2,所以有:



因为D=Q4,所以

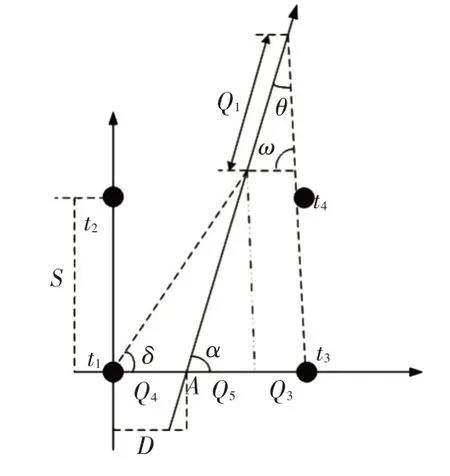
图7 当t1<t3时D的值
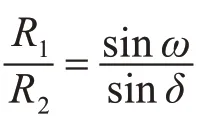

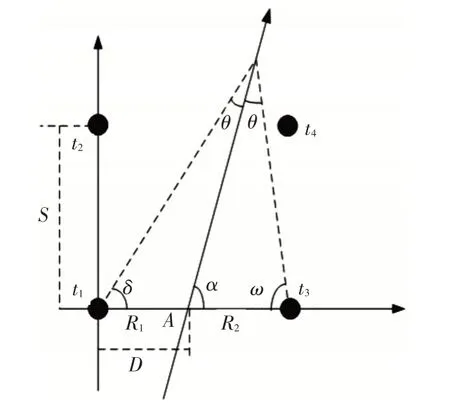
图8 t1=t3时,D 的值
4.3 G值的推导
α角可以用文献[3]中的式(13)来计算。
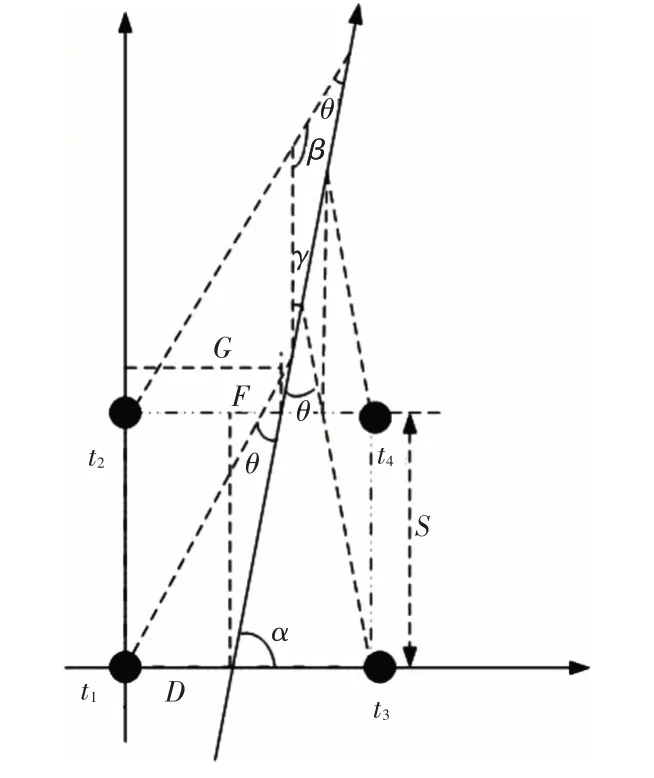
图9 G的长度
4.4 H值的推导

同理,如图11,当t2<t4时,得到
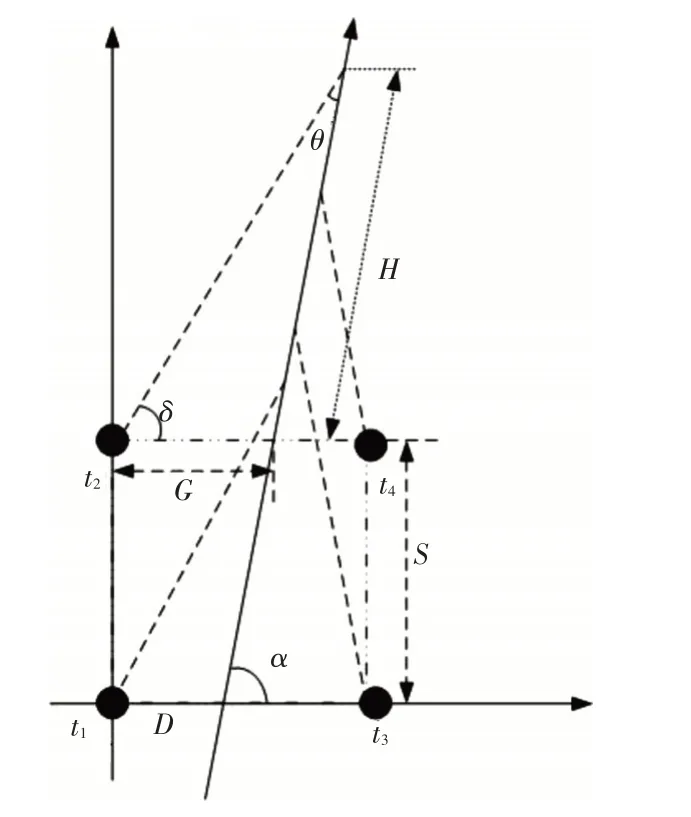
图10 当t2>t4时,H的长度

图11 当t2<t4时,H的长度
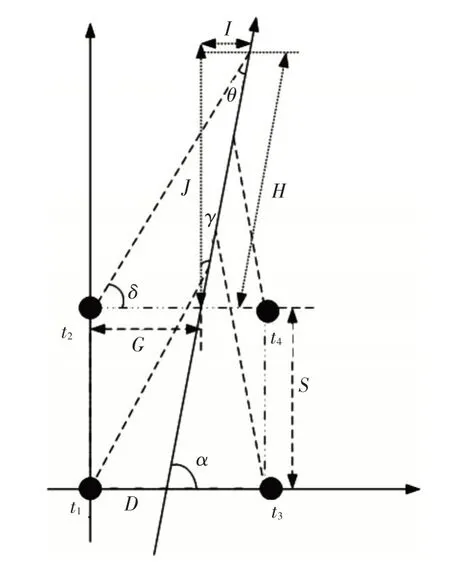
图12 计算I和J的值
4.5 计算船舶坐标(x,y)
所以I=H sin γ。
因此,得到
得到:

5 结语
本文提出了一种利用4 个节点的无线传感器网络进行船舶定位的计算公式。根据发散波对传感器的影响,我们描述了t1>t3,t1<t3,t1=t3的三种情形。通过推导,证明了x 和y 是传感器时间戳和节点之间距离的函数。假设每个传感器都有自己的坐标,我们就可以使用所提出的公式实时监测船舶位置。
