混联自稳跟踪平台跟踪误差建模与补偿∗
2020-05-25陈立坡
陈立坡
(92785部队 秦皇岛 066200)
1 引言
自稳跟踪平台能够消除外界不确定因素带来的横摇、纵摇的影响,保证平台上的电视跟踪仪等设备精准的对准目标。当目标运动时,通过解算,实时计算出自稳跟踪平台跟踪角度,确保搭载设备的跟踪精度。因此,自稳跟踪平台可放置于舰船、汽车等移动的载体,实现对空中、海上及陆地上目标的稳定跟踪。
目前,自稳跟踪平台在军事领域和民用方面得到了广泛的应用,跟踪方式多种多样。为了解决跟踪移动目标准确性和实时性的问题,李鹏[1]提出了基于两维度电视跟踪的控制系统,具有良好的抗外界因素干扰的能力;韩立强等[2]提出了一种基于ATP技术的新型混合自适应的控制算法,能够缩短系统的调整时间,大幅度提高跟踪精度;夏侯凯顺等[3]设计了一套基于双目云台相机的目标跟踪系统,在Matlab/Simulink 环境下模拟仿真,证实了方案的有效性,并且具备较高响应特性;董小萌,张平[4]阐述了极坐标结构捷联式视觉导引平台系统,具有良好的大离轴角跟踪能力;伴随着GPS全球定位系统精度的进一步提高,具有使用环境的优势,越来越多的领域和行业在使用GPS 技术来实现目标的稳定跟踪[5]。自动控制领域,在建立整个系统的数学模型的基础上,利用相关理论推导出误差数学模型[6~18],可为系统精度提高提供可靠的理论支撑。利用误差数学模型实时解算出瞬时误差,并对系统的输入进行修正补偿[19~20],通过前后对比,误差有了大幅度降低。
2 自稳跟踪平台和GPS 自主引导方式简介
2.1 自稳跟踪平台
自稳跟踪平台结构上分为两层,下层为自稳平台,主要是用来消除舰船摇摆所带来的影响,采用并联式3UPS结构,具有三个自由度;上层为跟踪平台,主要通过接收跟踪目标GPS 信息,实现准确对准目标的能力,采用串联式PU结构,具有两个自由度。
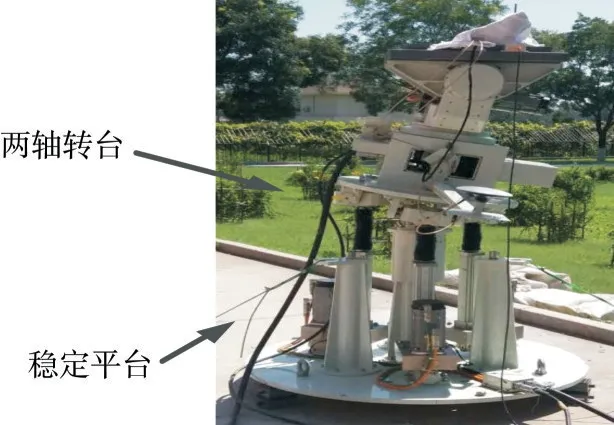
图1 自稳跟踪平台样机
2.2 GPS自主引导方式
在跟踪平台上固连一套测姿测向系统,可以直接获得该装备的经纬度值及跟踪平台“零点”与真北之间的夹角,利用无线或者有线网络将目标位置信息传输到控制系统,通过数据解算,得出跟踪平台需转动的角度,然后由控制系统精准的控制转动,达到稳定跟踪目标的目的。依据跟踪方式,推导数学模型:
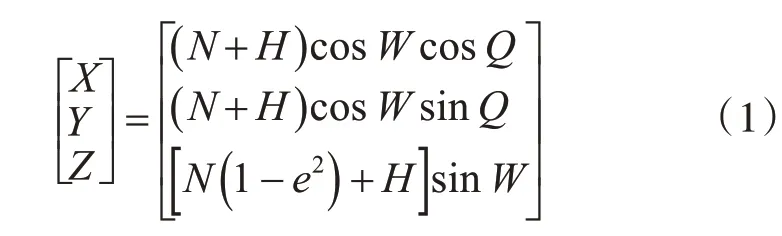

其中ξ为跟踪转台方位瞬时转角。
3 GPS自主引导误差模型与精度补偿
3.1 误差模型的建立
根据上面推导的跟踪数学模型,对式进行全微分可得:

可简化为
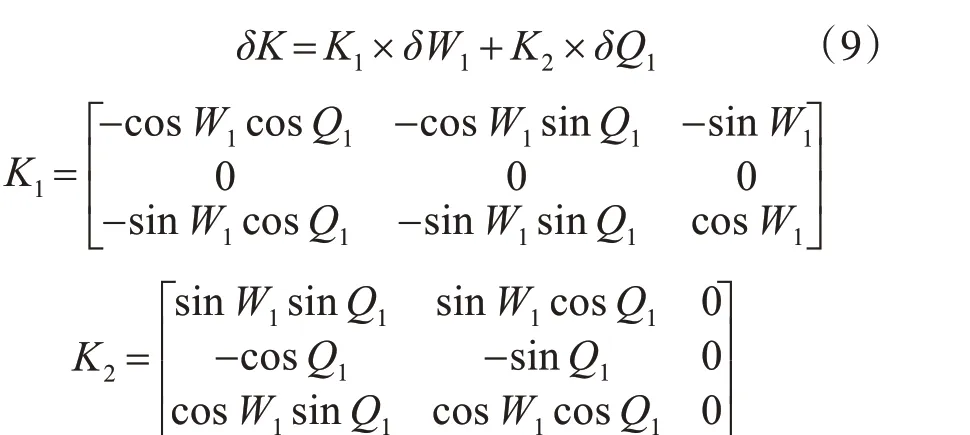
依据式(1)中的坐标变换,对坐标点Bi(i=1,2)进行全微分运算:
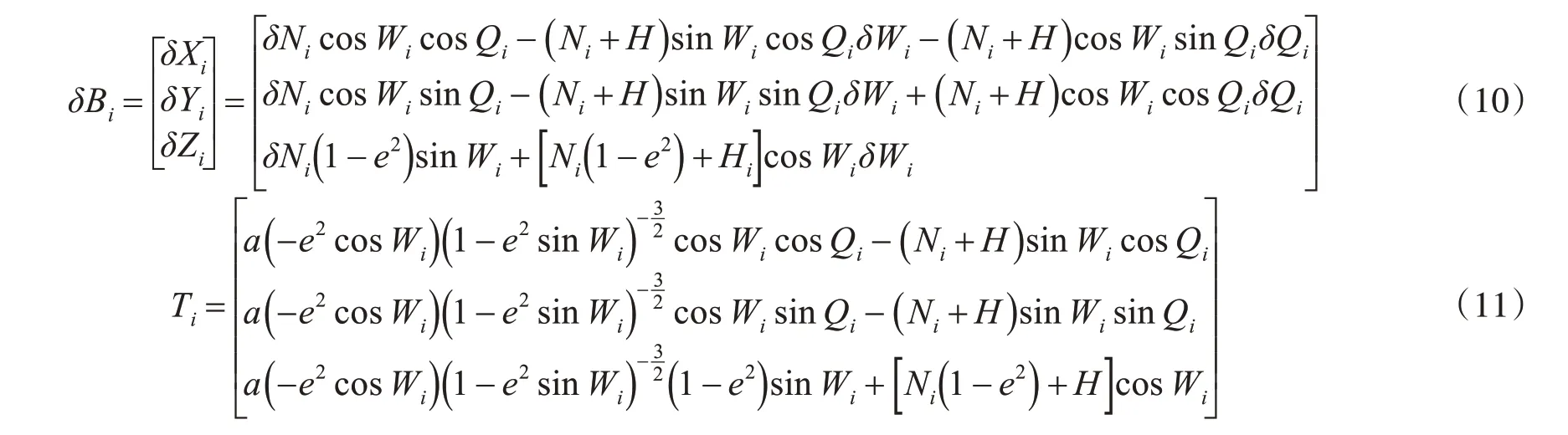

由于运动目标和跟踪转台的位置信息采用同一型号的GPS设备测得,因此有:
可得跟踪误差数学模型:

其中:δξ为跟踪转台精度,δφ为测姿测向系统精度。
3.2 GPS自主引导精度补偿
式(15)为自主引导系统的跟踪误差数学模型,在实际使用过程中,要求δα的数值越小越好,因此需要跟踪转台对跟踪误差数学模型进行补偿。
令δα=0,则得:

变换后有:

式(17)为推导的跟踪误差补偿数学模型,δζ为跟踪平台名义补偿量。
4 算法应用实例
为了验证跟踪误差补偿数学模型的准确性,是自稳跟踪平台具有更高的定位精度,对跟踪系统进行了精度补偿实验。基本思想是:根据跟踪误差数学模型计算出跟踪平台理想跟踪误差,然后将误差与理想跟踪方位转角相加得到实际转角。
实验一:自稳跟踪平台的坐标信息(39.922978,119.511807,28.63),跟踪目标沿直线运动从M 点(39.853,119.541829,25.67)运动到N点(39.997976,119.711177,28.65);实验二:自稳跟踪 平 台 的 坐 标 信 息(39.922978,119.511807,28.63),跟踪目标沿直线运动从M 点(39.803,119.483423,23.56)运 动 到 N 点(40.047976,119.769583,26.78),并将误差修正前和修正后进行比较。两次实验结果数据分析可得,通过建立跟踪误差补偿数学模型,可以大幅度提高混联自稳跟踪平台的跟踪精度,分别降低了28.3%~36.8%和23.7%~40.3%,能够保证跟踪平台搭载的设备更精准的对准目标。
5 结语
1)3UPS/PU 结构自稳跟踪平台采用的GPS 自主引导方式,建立了自主引导跟踪数学模型,推导出俯仰、方位跟踪角度与测姿测向系统、GPS 值及跟踪转台之间的映射关系。
2)建立了GPS 自主引导系统的跟踪误差数学模型,推导方位跟踪误差与各个分系统的映射关系,并由此得到了跟踪误差补偿数学模型。
3)对跟踪误差补偿数学模型进行了实验验证,通过2 次实验,结果表明跟踪误差分别降低了28.3%~36.8%和23.7%~40.3%,跟踪误差明显减小,表明跟踪误差数学模型可以有效提高3UPS/PU 结构自稳跟踪平台的跟踪精度。
