汽车智能防碰撞控制系统设计探讨
2020-05-24来君
来君


【摘 要】本文针对交通车辆碰撞事故越来越严峻问题,讲解设计一个汽车智能防碰撞控制系统的方法,选用 ADAS-SR 型 77GHz 毫米波雷达传感器跟踪探测汽车前方目标“距离及相对速度”;采用 STM32F103VET6 处理器分别对采集的信息进行分析比较、处理决策;当检测到即将碰撞障碍物的“距离及相对速度”为报警设定值范围时,控制系统自动发出报警提醒驾驶员减速操作;假如检测到障碍物的“距离及相对速度”为危险设定值范围驾驶员又没有及时采取任何措施时,控制系统采取自动制动刹车措施,从而避免碰撞事故发生。通过实车安装测试,设计的智能防碰撞控制系统控制准确度高、灵敏、稳定性高。
【关键词】汽车智能防碰撞 控制系统设计 报警 智能制动 智能防碰撞
【中图分类号】G 【文献标识码】A
【文章编号】0450-9889(2020)42-0110-03
目前汽车已经成为现代社会人们的主要交通工具。受汽车数量的快速增长、道路拥堵及驾驶人员人为因素影响,道路上汽车碰撞事故时有发生。传统汽车虽然都安装有被动安全装置,但也只是减小事故人员伤亡度的补救方法。随着电子智能技术的快速发展,汽车主动安全技术研究成为一个热门课题。探究交通安全事故发生的原因无非两个:一是驾驶员自身主观的问题(酒驾或开车不专心等),二是外部的环境客观因素影響(突然而来的汽车、人、障碍物等)。面对突发情况,如果驾驶员能够提前警觉危险并且快速刹车,那么将会大大减少交通事故的发生。本文设计的智能防碰撞控制系统,采用技术领先的毫米波雷达传感智能控制技术,面对各种即将发生的事故,控制系统会提前自动发出报警,并且替代司机采取自动制动刹车措施,从而提高汽车行驶的安全性,避免发生碰撞事故,保障人们的生命安全及减少财产损失。本文设计的智能防碰撞控制系统可以广泛安装于各种类型汽车上,具有较大的社会实用价值。
一、汽车智能防碰撞控制系统设计
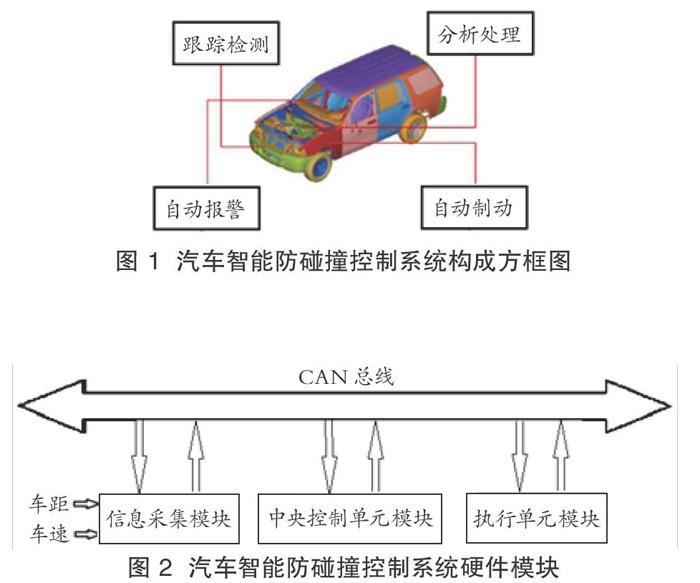
汽车智能防碰撞控制系统构成方框如图 1 所示。
跟踪检测:采用毫米波雷达传感器对汽车前方目标报警的“距离及相对速度”和危险的“距离及相对速度”进行精确跟踪探测,通过 CAN 总线实时将探测信息输送至中央控制单元。
分析处理:中央处理器接收到毫米波雷达传感器传送的信息,对汽车前方即将碰撞障碍物的“距离及相对速度”进行综合分析、比较、处理、决策,再通过 CAN 总线向执行单元发送“报警减速或制动”的控制信号。
自动报警:当汽车与前方即将碰撞障碍物的“距离及相对速度”为“报警”设定值时,执行中央处理器下达的报警指令进行报警,提醒驾驶员进行减速操作。
自动制动:当汽车与前方即将碰撞障碍物的“距离及相对速度”为“危险”设定值时,执行中央处理器下达的制动指令,系统自动减速及紧急制动刹车。
二、硬件模块设计
汽车智能防碰撞控制系统硬件模块如图 2 所示。
(一)信息采集模块
信息采集模块采用毫米波雷达作为核心部件。智能防碰撞控制系统通过毫米波雷达传感器完成对汽车行驶前方目标状态的采集工作,并通过 CAN 总线将采集信息输送至中央控制单元。其工作原理是通过信号发射、反射、回收、混频、放大、产生差频,依据差频信号计算出距离及相对速度,完成碰撞目标信息和识别路面状态信息的采集。系统选用磁电类的 ADAS-SR 型 77GHz 防撞毫米波雷达,测量波长范围为 1~7. 5 mm,频谱频率为 40~300 GHz;采用 1 TX 和 2RX 微型带天线阵列探测前方目标障碍物信息,能跟踪处理的目标达 32 个,探测距离达 200 m,相比其他雷达,具有远、准、稳的特点。
(二)中央控制单元模块
中央控制单元是智能防碰撞控制系统中枢,其作用是接收信息采集单元输送来的信息并进行分析、处理,判断汽车所处环境状态是否有碰撞危险,进而决策输出防碰撞控制指令。控制指令通过 CAN 总线输送到执行单元采取行动措施,实现智能防碰撞控制。中央控制单元选用 ARM32 位 Cortex -M3 的 S TM32F 103 VET6,采用 100 管脚 LQFP 的封装模式,具有功能及拓展性强、操作简易、成本低等特点。中央控制单元需要外接 2MB 的 Flash、复位电路、晶振电路、稳压电源电路。稳压电源电路选用 LTC6655 为电压基准芯片,可输出多组电压,该芯片选用输出 3V 电压供电,电压精度达 0.02 级,电流输出高达 1A,使芯片运行很平稳,同时集成芯片设计有限流保护及过热关断保护功能。
(三)执行单元模块
执行单元模块作用是接收控制指令实现自动报警提示以及智能减速制动。主要由报警装置、制动执行机构、节气门执行机构三部分组成。
1.报警装置。报警装置选用 MSKOlOB 芯片,重复擦除烧写语音功能强大,控制方法灵活。当检测到汽车与前方即将碰撞障碍物的“距离及相对速度”为“报警”设定范围时,中央控制单元输出控制指令触发 MSKOlOB 产生报警语音信号,信号经放大推动喇叭报警。报警电路如图 3 所示。
2.制动执行机构。制动执行机构核心部件是制动缸及电磁直线执行装置,把电磁直线执行装置安装于制动缸的活塞内。当毫米波雷达检测到汽车与前方即将碰撞障碍物的“距离及相对速度”为“危险”设定范围时,中央控制单元对采集到的信息进行分析比较、决策,然后控制脉宽调制(PWM)电路输出脉宽调制电压信号,电压信号经过驱动电路转化为电流信号,电流流过电磁直线执行装置产生电磁力,电磁力驱动液压缸活塞移动,从而对汽车车轮施加制动力,实施紧急制动刹车。
3.节气门执行机构。节气门执行机构主要包括控制电路、驱动电路、直流电动机三部分。如图 4 所示。
当汽车与前方即将碰撞障碍物的“距离及相对速度”为“报警或危险”设定范围时,节气门执行机构执行中央处理器下达的减速指令,自动调节节气门开度使汽车减速。控制电路作用是依据中央控制单元的控制指令输出一个脉宽可调、频率为 100Hz 的 PWM 电流信号;电流信号经过驱动电路处理、放大后驱动直流电动机改变节气门开度。驱动电路如图 5 所示。
直流电动机的控制采用线性驱动及脉宽调制的方式。通过调制 PWM 占空比实现直流电机的电枢电压改变,以控制直流电动机的扭矩,使电子节气门开度改变进行自动减速。
三、软件系统设计
(一)系统主流程
控制系统设计利用毫米波雷达传感器对汽车行驶前方目标进行跟踪探测,实时获取距离和相对速度等信息,信息经过与设定的安全阈值比较、分析处理后判断汽车是否处在设定的安全范围内。假如探测到前方即将碰撞障碍物的“距离及相对速度”达报警设定值时,报警装置自动报警提醒驾驶员进行减速操作,如果驾驶员没有及时采取任何行动措施,并且判断前方即将碰撞障碍物的“距离及相对速度”为危险设定值范围时,系统的制动机构采取自动制动刹车措施,实现汽车的智能防碰撞控制,从而避免汽车发生碰撞交通事故。
智能防碰撞控制系统软件采用 KeiluVision4 作为设计环境。依据汽车安全行驶制动特性要求,设定安全距离与相对速度对应值。当车分别以 10km/h,30km/h,5Okm/h,70km/h,90km/h 的行驶相对速度时,毫米波雷达报警距离设定为 9m,13m,29m,52m,68m,对应危险制动距离设定为 1.5m,3.5m,9.5m,20.5m,26.5m,34.5m,制动阈值设定为1.8m,3.8m,9.8m,20.8m,26.8m,34.8m。智能防碰撞控制系统软件主流程如图 6 所示。
(二)报警及危险处理子程序流程
汽车行驶于不同车速时,汽车智能防碰撞控制系统能进行实时快速分析、比较、判断,如果汽车与前方目标物间距小于或等于报警距离时,控制系统就会判定当前汽车处于临近危险状态并提醒司机进行减速操作,如果报警后司机还不采取任何行动,且达到小于或等于危险距离时汽车自动制动刹车,以免发生碰撞事故,保障汽车驾驶的安全行驶。汽车智能防碰撞控制系统的报警及危险处理子程序流程如图 7 所示。
四、实验测试
选用 1.4T 速腾车型安装智能防碰撞控制系统进行实验测试。
(一)毫米波雷达报警实验
为了安全,采用低速 10km/h,15km/h,20km/h,25km/h,30km/h 的行驶速度分别测试毫米波雷达报警时汽车与前方障碍物目标的实际距离,测试的实际距离与设定的值进行比较,误差为 0.07~0.20m,测试结果说明智能防碰撞控制系统毫米波雷达报警的灵敏度达到本设计要求。
(二)紧急制动实验
为了安全,采用低速 10km/h,15km/h,20km/h,25km/h,30km/h 的行驶速度分别测试毫米波雷达报警直至车自动减速、制动停止,测试车与前方障碍物之间的间距与设定的最小制动阈值比较,测试结果符合设计要求。
五、结论
汽车智能防碰撞控制系统硬件设计选用毫米波雷达传感器跟踪探测前方目标距离及相对速度,利用 KeiluVision4 进行软件流程设计,通过 STM32F 103 VET6 处理器对跟踪探测信息实时进行分析、处理、决策,使控制执行单元准确无误报警、减速、制动。通过实车低速实验测试,测试结果表明该智能防碰撞控制系统完成报警、减速、制动、停车的智能控制过程灵敏度及准确度高,运行稳定,测试指标均达到设计的要求。各种类型汽车均可安装使用该智能防碰撞控制系统,这个系统在汽车工程领域具有较大的应用前景。
【参考文献】
[1]肖广兵,陈有超,等.基于 Google Earth 的车辆防碰撞虚拟仿真系统[J].软件导刊,2019(10).
[2]李海青,赵又群,林 棻,等.汽车高速紧急避障路径跟踪与主动防侧翻控制[J].哈尔滨工业大学学报,2019(7).
[3]裴紅蕾.智能汽车换道避障路径规划与跟踪方法[J].中国安全科学学报,2018(9).
[4]周中升,张燕军,李竹峰.智能汽车路径跟踪控制方法设计[J].农业装备技,2019(3).
[5]甄晓阳.国内智能网联汽车概况及发展建议[J].汽车工程师,2018(12).
【作者简介】来 君(1970— ),女,广西南宁人,广西机电工程学校高级讲师,研究方向为汽车电气系统智能控制。
(责编 李 言)