The prediction formula and a risk-based sensor scheduling method in target detection with guiding information
2020-05-23CePangGanlinShan
Ce Pang, Gan-lin Shan
Army Engineering University, Shijiazhuang 050000, People's Republic of China
Keywords:Sensor scheduling Target detection Operational risk Information guiding
ABSTRACT Sensor scheduling is used to improve the sensing performance in the estimation of targets' states.However, few papers are on the sensor scheduling for target detection with guiding information. This letter can remedy this deficiency. A risk-based target detection method with guiding information is provided firstly, based on which, the sensor scheduling approach is aiming at reducing the risk and uncertainty in target detection,namely risk-based sensor scheduling method.What should be stressed is that the Prediction Formula in sensor scheduling is proposed. Lastly, some examples are conducted to stress the effectiveness of this proposed method.
1. Introduction
Sensor networks have been applied both on military and civilian areas to acquire information[1-3]or estimate the state of systems[4,5]. In combats, they play an important role in target detecting,tracking and so on. And the problem of selecting sensor nodes to possess the best sensing performance, called sensor scheduling or sensor management [6,7], has attracted researchers' interest for many years. Until now, three main sensor scheduling approaches have been proposed, including task-based methods [8-10],information-driven, methods [11-13] and risk-based methods[14-16]. Due to taking operational risk and actual operational demands into consideration, the third approach makes it easier for commanders to make sense of the objective function and has been a focus in the recent years, which is also adopted in this paper.
The risk of a harmful event is defined as the product of the occurring probability of this event and the cost once it occurs.Obviously, when conducting sensor scheduling, different operational tasks result in different objective functions. In this paper,based on operational risk,a method of scheduling sensors to make the result more accurate in information guiding target detection is proposed.
The rest of the letter is organized as follows. Section 2 introduces the problem formulation, including the target detection model and the sensor scheduling objective function based on operational risk.Some simulation examples are conducted and the results are shown in Section 3 before Section 4 concludes the letter.
2. Problem formulation
When some information on motion states of a target is transmitted from one sensor to another sensor,for example,in the target delivery process,the cued sensor can capture the target more easily with the help of guiding information.However,if there exits some errors in the guiding information,it will take the cued sensor some time to catch the target.More seriously,if the detected region is so large that the cued sensor can't capture the target in the required time,the target will be lost.Two steps should be followed when the cued sensor searches for the target under the leading of the cuing sensor, including confirming the detected regions firstly, and capturing the target in the regions.The target cuing and capturing process is shown in Fig.1.
The position of the target is assumed to obey the Gaussian distribution, and its probability density can be denoted as:

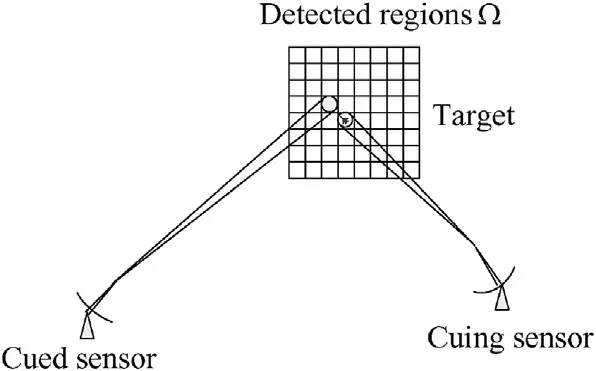
Fig.1. Demonstration of target cueing and capturing process.
where(θ,φ)is the true position of target,is the estimation of the position,andare the position variances respectively in azimuth angle and pitch angle.
The variablePΩdenotes the probability that the target is in the detected areas Ω = {Ω1, Ω2,…, ΩN}, and can be calculated by:

Similarly,the prior probability of holding a target in subarea Ωkbefore measuring can be calculated by:

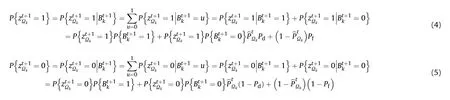
The variableP0denotes the lowest probability required to capture a target.Once there isthe searched regions Ω can be calculated out, and the position) is usually regarded as the centre of the detected areas. Then the following description is on the target detection process based on Hypothesis Testing in the detected regions. When the subarea Ωk∈Ω is detected, there are two hypothesises, includingHk= 1, denoting that the target is in the subarea Ωk,orHk=0,denoting not.The variablePddenotes the detection probability of the sensor,and the variablePfdenotes the false alarming probability. The variabledenotes the updated probability of holding the target in subarea Ωkat time instantt.The variabledenotes the observation at time instantt+ 1, anddenotes that the target is in the region Ωk, butdenotes not. The variabledenotes the true states in the area Ω. The variabledenotes that Ωkholds a target,and the variabledenotes not.
The probability ofcan be calculated by Eq. (4). The probability ofcan be calculated by Eq. (5).
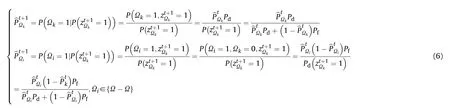
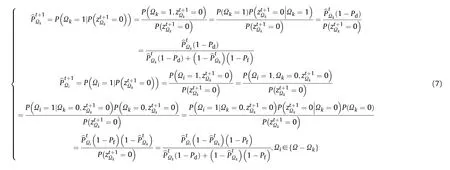
At time instantt+ 1, when the measurement isthe updated probabilities of holding a target in region Ω can be calculated by Eq. (6). When the measurement isthe updated probabilities can be calculated by Eq. (7).
After probabilities of holding the target are updated at time instantt+1, judgements can be made following the Bayesian risk theory. The variablesdenote the judgement on whether there is a target in region Ωkor not. The equationdenotes that Ωkholds a target,and the equationdenotes not.
The matrixCdenotes the cost matrix, and it is defined as:

where the variable)is the cost when the true state isbut the judgement is
Then the risk can be calculated by:

The variablesdenote the risk of making judgements. And the riskin Ωkcan be calculated by:

Then the estimation state of Ωkcan be taken asThe total risk can be calculated by the equationWhen scheduling sensors to detect and capture a target,the sensor scheduling scheme can be made following the rule of reducing the maximum risk, and the objective function is as follows:

subjects to:
(1) One sensor can only detect one region at the same time;
(2) One target can be detected 20 times at most in a time interval.
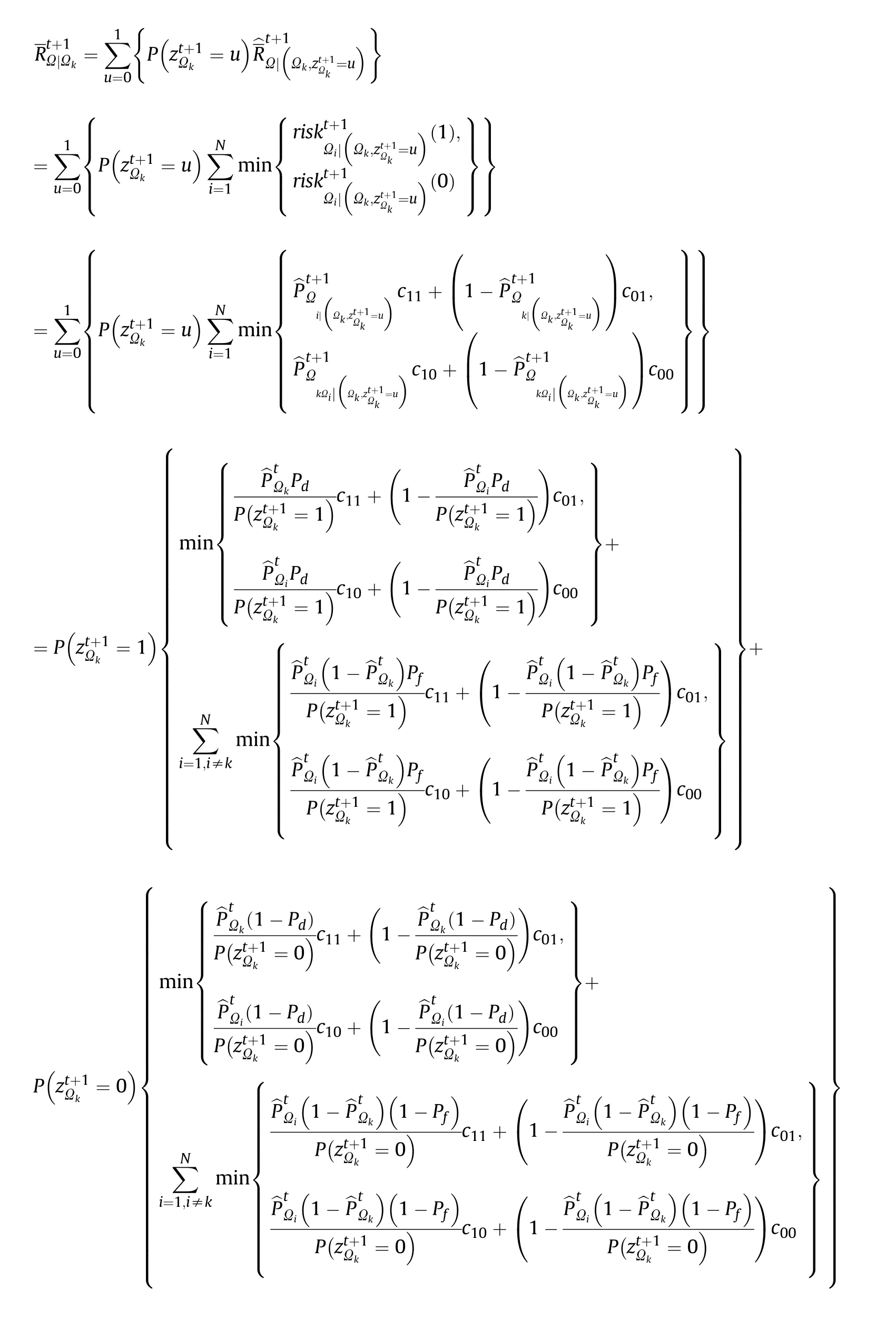
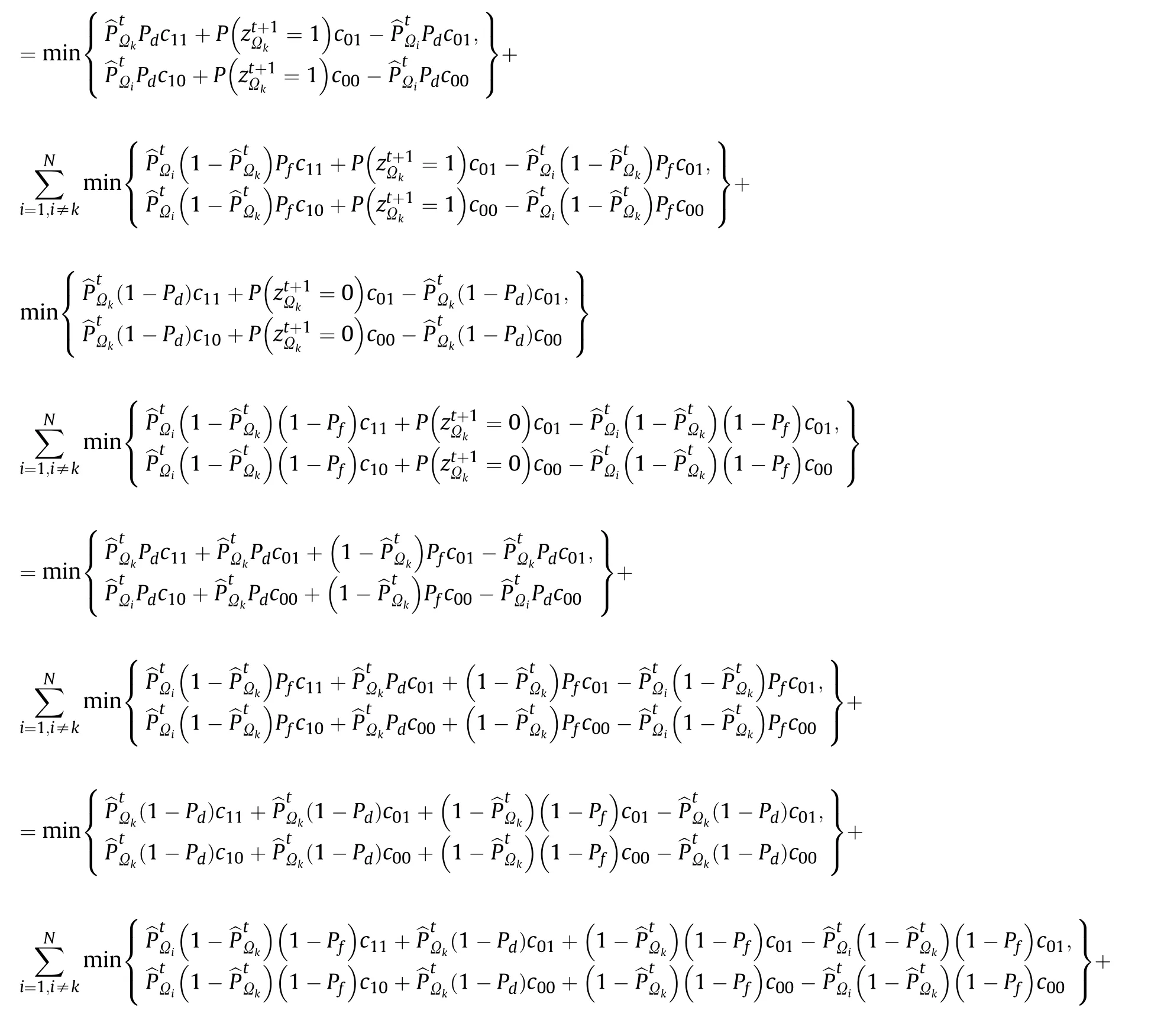
For the reason that there are no observations of the time instantt+1 at time instantt, the value ofcan't be obtained when making a sensor scheduling scheme,then the variablewhich represents the prediction vale when Ωkis detected at time instantt+1,is used to replace the value ofThe variablecan be calculated by the Prediction Formula in sensor scheduling,which is shown in Appendix.
Then the objective function has been changed into:

3. Application to examples
In simulation, one sensor is used to capture two targets respectively. The position distributions of targett1are following to θ-N(0,0.5) and φ-N(0,0.5). The position distributions of targett2are following to θ-N(0,2)add φ-N(0,2).The cost matrix isThe related parameters areP0= 0.95,Pd= 0.85,Pd=0.85 andPf= 0.05. The range of one beam is 1°× 1°. The information-driven sensor scheduling method[17]and probabilitybased sensor scheduling method are used to make comparisons.The simulation results are shown in Fig. 2 and Fig. 3.
In Fig. 2(a), all detected areas are numbered in sequences; in Fig. 2(b), the curves show the detected areas separately in three kinds of target detection methods;Fig.2(c)is on the comparisons of instant risk values by using three different target detection methods.
Fig. 3(a) shows the time sequence of detecting the required areas adopting to the risk-based target detection method;Fig.3(b)shows the time sequence of detecting the required areas adopting to the information-driven target detection method;Fig.3(c)shows the time sequence of detecting the required areas adopting to the probability-based target detection method;in Fig.3(d),all detected areas are numbered in sequences;in Fig.3(e),the curves show the detected areas separately in three kinds of target detection methods; Fig. 3(f) is on the comparisons of instant risk values by using three different target detection methods.
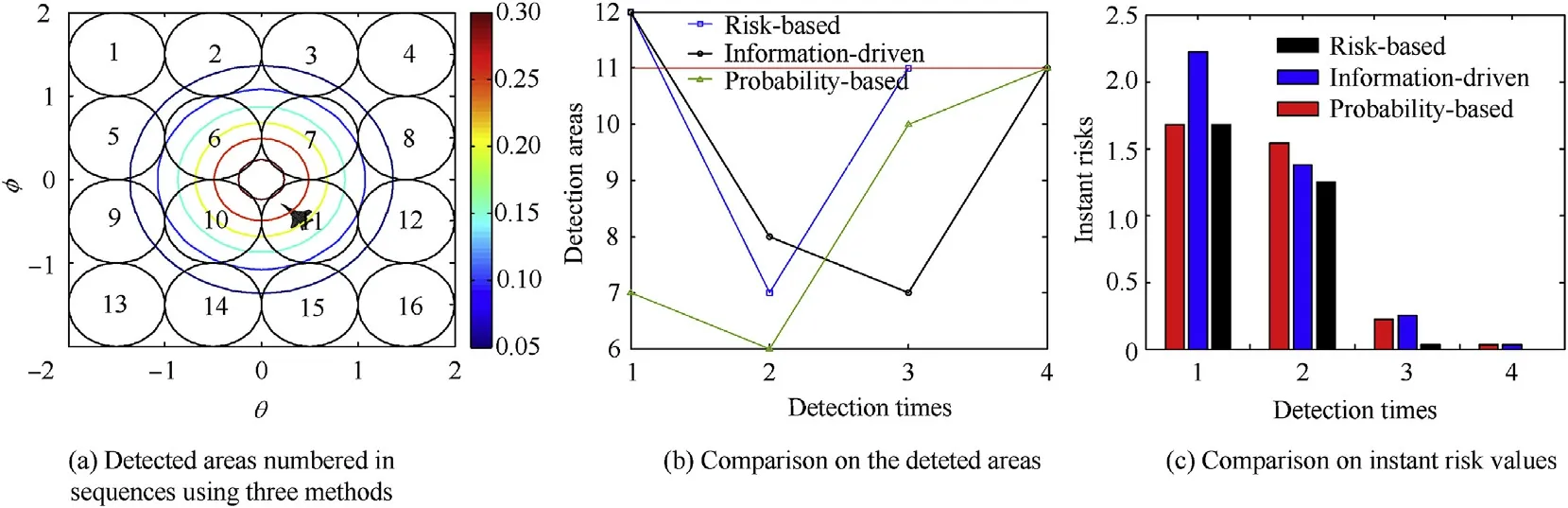
Fig. 2. Demonstration of target detecting and capturing process.
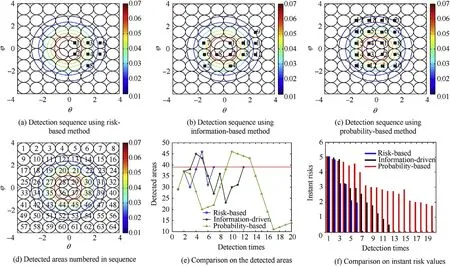
Fig. 3. Demonstration of target detection and capturing process.

Table 1 Comparison results of three methods.
It can be seen from Fig.2 that all of the three methods can detect and capture the target successfully when the guiding information is pretty accurate, and the risk-based method possesses a little advantage. But from Fig. 3, when the guiding information is not accurate,the first two methods can capture the target successfully and the risk-based method has the lowest risk value,however,the third method cannot locating the sensor effectively.
Furthermore, 1000 Moto Carlo simulations are conducted to compare the three sensor scheduling methods in case of chance factors and the results are shown in Table 1.
From Table 1,it can be seen that the risk-based method performs the best in the successful detection time with the fewest mean detection time.
4. Conclusion
This letter proposed a risk-based sensor scheduling method in target detection with guiding information.In the proposed method,the sensor scheduling scheme with the least risk value was selected, and by some simulation examples, it could be seen that the risk-based method performed better than information-driven method and probability-based method. What should be stressed is that the Prediction Formula in sensor scheduling is proposed and deduced.
Acknowledgments
This work was supported by National Natural Science Foundation (grant 61573374).
Appendix
The Prediction Formula and its demonstration are as follows:
杂志排行
Defence Technology的其它文章
- Defence Technology
- An air cavity method for increasing the underwater acoustic targets strength of corner reflector
- Enhancing the explosive characteristics of a Semtex explosive by involving admixtures of BCHMX and HMX
- Modeling and realization of real time electronic countermeasure simulation system based on SystemVue
- Numerical investigation of dynamic interaction with projectile and harmonic behaviour for T-finned machine gun barrels
- Anti-follower jamming wide gap multi-pattern frequency hopping communication method