鱼体回转式分级机自动控制设计与试验
2020-05-21朱烨洪扬江涛
朱烨 洪扬 江涛


摘要:鱼体分级筛选是一种有效避免种内竞争、提高鱼体存活率的方法,但由于国内缺乏先进设备,生产中大多以人工作业为主。针对人工操作存在劳动强度大、鱼体损伤等问题,研制了一种以S7-200 SMART系列PLC(programmable logic controller)为处理器、结合多步进电机和触摸屏界面开发的鱼体分级自动控制系统。该系统采用变频调速技术,实现对转速可调的功能;采用限宽调节技术,实现对鱼体大小自动调节功能。运用STEP 7-Micro/WIN SMART编程软件完成控制程序的编写,借助SIMATIC WinCC flexible 2008完成触摸屏界面开发,运用以太网通信完成触摸屏界面对多步进电机的运动控制,实现限宽调节功能。性能测试表明,在额定电压(380 V)下,主回转电机运行速度可在0~50 Hz范围内调速,限宽可调范围为0~40 mm,可将4种不同大小的鱼进行分级。在设定宽度下,鱼体的准确率在±90.0%。该控制系统性能可靠,适合在渔业养殖中推广。
关键词:鱼;分级筛选;S7-200 SMART PLC;步进电机;以太网通信;界面开发
中图分类号:TP273 文献标志码:A 文章编号:1002-1302(2020)06-0204-05
随着我国养殖工程技术的迅猛发展,水产养殖产业朝着精细化的方向不断发展。在水产养殖过程中,鱼群内生长不均衡是个热点问题,主要表现为残食[1-3]、食物竞争[4-6]等。通过鱼类分级筛选可以有效避免种内竞争,提高了鱼成活率;且市场商品是根据鱼体大小分类,也可方便将幼鱼和商品鱼分级。
国内现阶段对鱼类分级所做的研究还不是很充分,以往的手工操作不仅费时、费力,且由于鱼类转移速度缓慢以及操作过程中对鱼体的损伤和对鱼群的惊吓等,还会带来较高的死亡率且无法精准快速地分级[7]。Johnsons在1983年设计了一种安装在地拉网中用以分离鲑鱼的系统,但分离系统笨重,会引起鱼体损伤[8];国内早期邱洪奎等研究的活鱼分级器[9]采用多斗分级装置,不间断分级,但它要更换筛底,操作不便,自动化程度低;王志勇等研究的鱼类质量自动分级装置,采用水平式调节辊间距模式筛选幼鱼,虽然减少劳动力,但存在鱼易脱水和鱼体损伤等缺陷,不利于现代养殖业的发展[10];郑国富等通过改变网箱中栅格间距实现鱼类分级,可操作性大,但灵敏度不高[11]。因此,为了满足水产养殖需求,且要确保分级高效、减少鱼体损伤,设计基于鱼体厚度回转式带水精准分级机。现以回转式分级机为研究载体,通过SMART 700 IE触摸屏界面的开发,通过以太网通信,实现触摸屏界面与2台SMART系列ST30 PLC进行信息传输[12-13],运用USS协议实现PLC与V20变频器通讯[14],实现对主回转电机转速控制,完成分级机控制系统的设计。
1 控制系统结构及原理
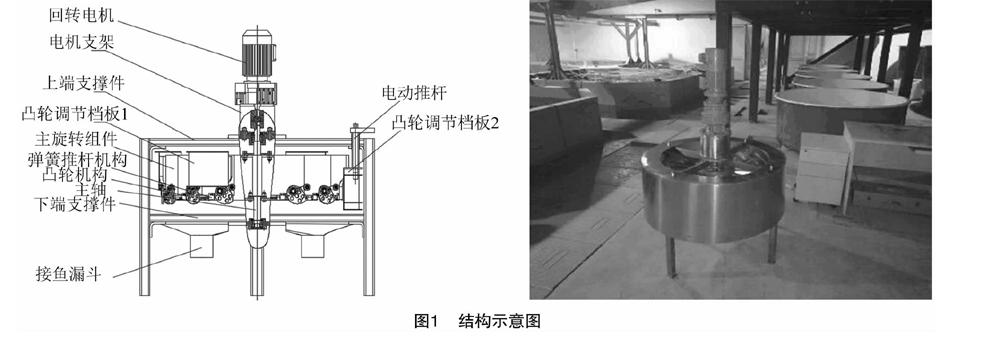
回转式鱼体分级机由变频器调速系统、丝杠导轨和步进电机限宽调距系统、电气控制系统等组成,其系统结构示意图如图1所示。
它的主要原理是首先将电动推杆调到设定的高度,变频电机带动主轴转动,主轴则带动旋转组件转动,当旋转组件转动时,电动推杆带动凸轮调节挡板1下压,同时带动凸轮机构下降,推动弹簧推杆机构,改变内部活动门的开度;其中电动推杆(步进电机)有4个,凸轮调节挡板1有3个,当第1个凸轮调到设定高度,凸轮可保证当前高度,之后调节高度是在之前调节高度基础上继续调节;凸轮调节挡板2上移,带动凸轮机构上升,推动弹簧推杆机构,使得内部活动门复位。
回转式鱼体分级机控制系统,主要由变频器、回转电机、2 台 ST30 PLC、SMART 700IE 触摸屏界面、交换机、4个步进电机驱动器、4个步进电机、接近开关等组成,控制系统总体框架如图2所示。
在控制系统中,触摸屏界面主要实现对回转电机的转速控制、步进电机的调距控制;PLC主要通过控制变频器实现对回转电机转速控制,控制步进电机驱动器实现对步进电机的运动控制;接近开关控制信号的采集与处理功能;交换机主要实现设备间的以太网通信。
2 系统硬件设计
采用 S7-200 SMART系列PLC作为核心控制。实现对回转电机的转速控制、步进电机的控制以及接近开关信号处理等功能,根据实际需要,系统采用晶体管输出型CPU ST30 模块,该模块包含18DI、12DO,模块集成3路频率可达100 kHz高速脉冲输出,支持 PWM/PTO输出方式以及多种运动模式,可控制步进电机的位置和速度。集成以太网端口实现程序的下载、调试以及其他设备进行通信。
触摸屏界面采用 SMART 700 IE V3触摸屏,该触摸屏具有工业以太网接口和RS485接口,可通过触摸屏控制面板完成和PLC通信。同时可借助交换机实现多个PLC的通信。
限宽系统主要由丝杠导轨、步进电机和步进电机驱动器组成,步进电机采用57系列步进电机,驱动器采用SMD3506M[15],该驱动器可达 128 細分,电流可达4.5 A,噪音小,运行较为平稳。步进电机驱动器输入端接线方式是分别将驱动器中PUL-、DIR-连接到控制系统的地端;脉冲输入信号接 PUL+端,方向信号接DIR+端,PLC输出信号须要串联 2 kΩ限流电阻。
变频器调速主要由变频器和主回转电机组成,变频器采用SINAMICS V20,经济、可靠且易于使用,选用功率为0.55 kW,主回转电机选用变频调速三相异步电动机,功率为0.37 kW,转矩为2.5 N·m,变频电机通风机为0.03 kW。
控制系统的硬件接线图如图3所示。
3 系统软件设计
系统软件设计主要包括触摸屏界面组态和 PLC程序编写,然后对触摸屏上参数进行设置,实现对主回转电机转速控制,以及对4台步进电机的运行速度和方向进行控制,保证系统稳定可靠地运行。
