一种垂直循环立体车库的设计
2020-05-21曲艺田海锋周传喜周华健张仕帆
曲艺,田海锋,周传喜,周华健,张仕帆
一种垂直循环立体车库的设计
曲艺,田海锋,周传喜*,周华健,张仕帆
(长江大学 机械工程学院,湖北 荆州 434023)
针对由于私家车数量增加而愈发严重的小区乱停车、停车难问题,设计了一款新型防晃垂直立体停车装置。装置由六个系统组成:驱动系统、传动系统、载车系统、机架系统、防晃系统、控制系统,通过 SolidWorks 三维建模建立了完整的机构,并对关键零件尺寸进行计算。装置采用螺旋传动使得机械运转更加平稳,且配备防晃装置提高整体安全性,并通过PLC控制系统智能控制可实现低功耗存取车。装置可同时容纳8辆汽车,在一定程度上减轻了停车压力。
垂直循环;立体车库;防晃装置;螺旋传动
随着我国汽车保有量的持续增加,停车难问题日益突出。目前市面上主流的停车装置按工作结构及形式分有巷道堆垛式、垂直循环式、升降或横移式等。其中垂直循环式停车装置最为适用于小区,该种停车装置占地面积小,灵活性高,可在小区楼栋之间建立[1-3]。本文旨在介绍一种创新垂直循环立式车库,该车库外型采用钢架结构,可快速组装,并采用螺杆传动,使得运动更加平稳。在安全方面,采用防晃轨道与防晃滚轮配合的方式,大大提高了载车系统的平稳性,从而提高了整体的安全性。
1 立体车库总体结构
本垂直循环防晃车库的机械结构主要由驱动系统、传动系统、载车系统、防晃系统、机架系统、PLC控制系统这六大部分组成[4]。本装置总体结构如图1所示。
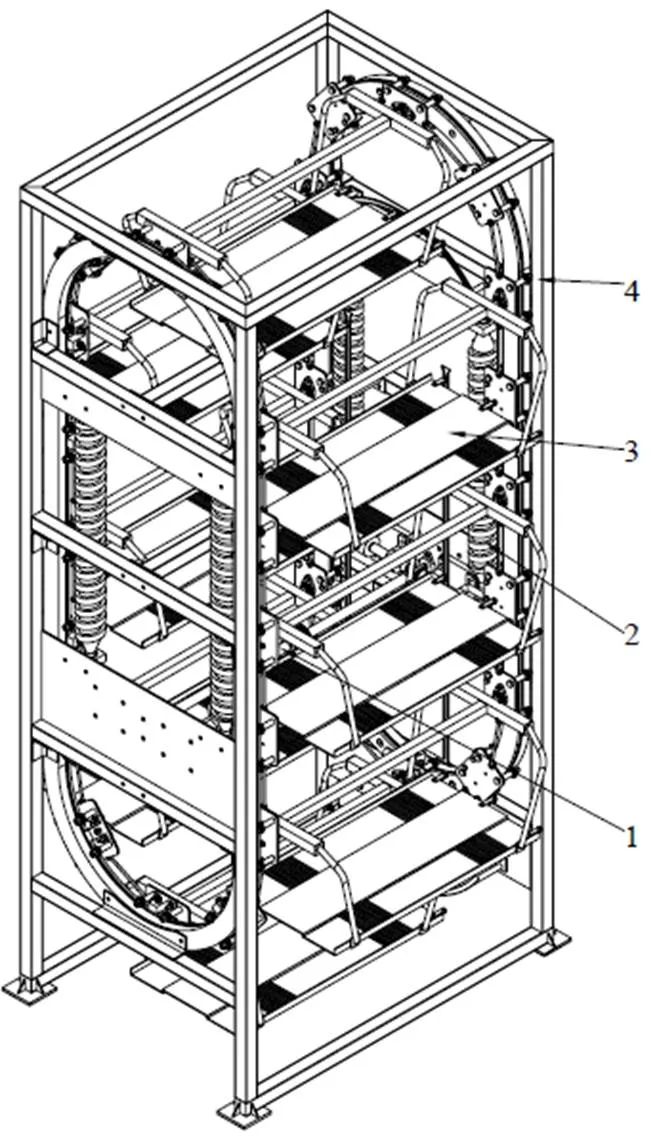
1.驱动系统 2.传动系统 3.载车系统 4.机架系统
1.1 驱动系统
由单个三相交流异步电机为原动力,驱动多级齿轮传动,进而带动四连杆驱动使得滑座可延直槽口型滑轨运动,即将动力传至传动系统。
1.2 传动系统
传动系统则使用两级锥齿轮机构将主轴的旋转运动转变为螺杆的旋转运动,螺杆的传动采用回旋螺杆传动机构[5],将车运转起来,从而留出空位便于下一辆车的停入。具体结构如图2所示。
电动机1通电旋转,经过一对斜齿圆柱齿轮机构2降低转速增大力矩同时带动长轴3旋转。长轴3再通过左右对称的直齿锥齿轮机构5将运动传递给水平方向上对称布置的两根短轴7。每根短轴7又通过一对直齿锥齿轮带动竖直方向上的螺杆6(左、右旋各一根)。螺杆6绕其轴线旋转,带动与之啮合的滚子4,即滚子卡在螺杆的槽中。滚子4的内圈安装在滑座8上,每个滑座通过四个梯形滚轮10嵌入到梯形槽导轨9中。所以在螺杆6旋转时,滚子4与滑座8形成的整体在梯形槽导轨9上移动。相邻的滑座由连杆11相连,构成了一个整体的循环系统。由于螺杆较长,故在其螺杆槽内会同时有多个滚子与其啮合,则在螺杆不断旋转的过程中,至少两个不同滚子一直与其啮合,由多个滑座构成的系统便沿着梯形槽导轨9连续运动。因为连杆组成了封闭回路,使得假使有一根连杆发生了断裂,整体回路也依旧能继续运转,这样提高了整体结构的安全性也使得更换维修更加方便。同时通过调节连杆即改变连杆长度,就可以改变两滑座的间距,确保了滑座间距的准确性。本传动装置所采用的螺杆传动,即螺旋形凸轮机构,相较于传统的链条和皮带传动具有所需驱动力更小、循环速度更快、运动更加平稳且噪音更小的优点。

1.电机 2.斜齿圆柱齿轮 3.长轴 4.滚子 5.直齿锥齿轮 6.螺杆 7.短轴 8.滑座 9.梯形槽导轨 10.梯形滚轮 11.连杆
1.3 载车系统
载车系统的载车板上在轮胎与载车板接触的部分采用凹槽设计,增大摩擦防止车辆滑移。
1.4 机架系统
机架系统由方钢焊接而成,并通过力学原理计算得出最为稳定的结构。车库的每个系统之间采用可拆的连接方式,使得整个装置拆装简单、安装周期短。
1.5 防晃装置
防晃装置主要作用是约束载车系统的周向自由度, 保证系统的的稳定运行。装置结构如图3和图4所示。
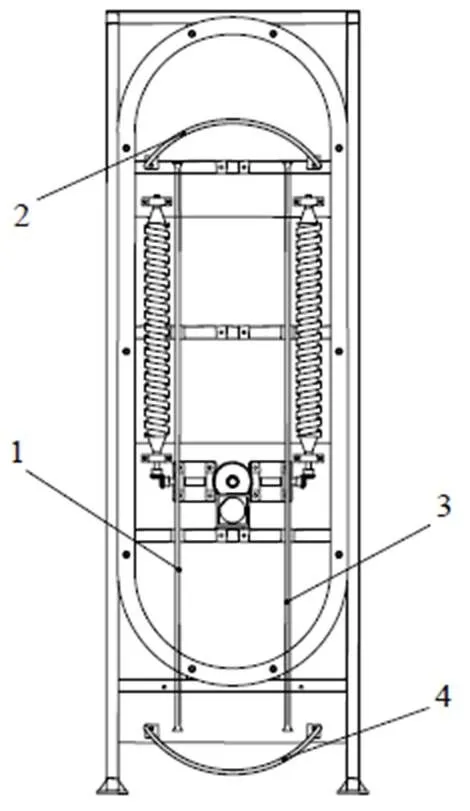
1.左侧防晃直导轨 2.上端防晃圆弧导轨 3.右侧防晃直导轨 4.下端防晃圆弧导轨

1.左侧防晃杆 2.防晃滚轮 3.中间防晃杆 4.吊篮 5.右侧防晃杆
装置由两部分构成:第一部份是四条不相连的防晃导轨(图3),分别是上下两段防晃圆弧导轨与左右两段防晃直导轨,四段防晃轨道分别固定在机架的不同位置上;第二部份是固连在各个载车板前侧上的三个与防晃导轨配合且端部带防晃滚轮的防晃杆(图4)。在整个装置启动与制动的瞬间,车辆与载车装置形成的系统加速度变化大,尤其位于梯形槽导轨圆弧处的车辆极易产生晃动,平稳性与安全性较低。本防晃装置通过这两部分的配合,可有效提高吊篮4(图4)在运转过程中的稳定性。
在吊篮4延梯形槽导轨直线上行或下行时,载车板上的两侧中某一侧防晃杆的防晃滚轮在与其配合的防晃直轨道内滑动;在吊篮4延梯形槽导轨圆弧线段进行运动时,载车板上的中间防晃杆3上的防晃滚轮2在与其配合的防晃圆弧导轨内滑动;在吊篮4延梯形槽导轨从直线部分轨道进入圆弧部分轨道的过程中,载车板上的两侧中某一侧防晃杆的防晃滚轮脱离与其配合的防晃直轨道,中间防晃杆上的防晃滚轮则进入与其配合的防晃圆弧导轨轨道。即综上过程,吊篮在延梯形槽导轨上运动的整个过程中,载车板上的防晃杆端部的防晃滚轮总与防晃导轨配合,这样便可保证车辆在任何位置都晃动最小,以此提高本垂直循环车库的安全性。
1.6 控制系统
本车库采用三菱FX2N单片机控制器在控制系统中采用PLC控制进步电机,高性能光敏元件传感器检测定位信号,人机操作界面等。出于安全方面的考虑,设有用于不同目的的传感器,如检测停车位置、人员出入等。存车流程如图5所示[6]。
2 结构设计计算
2.1 导轨的回转半径、连杆长度和滑座长度尺寸确定
为简化设计思路,现做如下假定。假定一,滑座长等于连杆长;假定二,车位数为8辆。假定三,两个车位之间有一个空滑座。有了以上三个假定,即可通过停车位的最小外廓尺寸确定导轨的回转半径。经确定不会引起车位碰撞的导轨的较小的回转半径为1700 mm,从而连杆长和滑座长都确定下来为776.03 mm。
图6所示为用SolidWorks零件草图进行的辅助设计[7],线粗相同的方框对应相同时刻相邻车位的位置[8]。
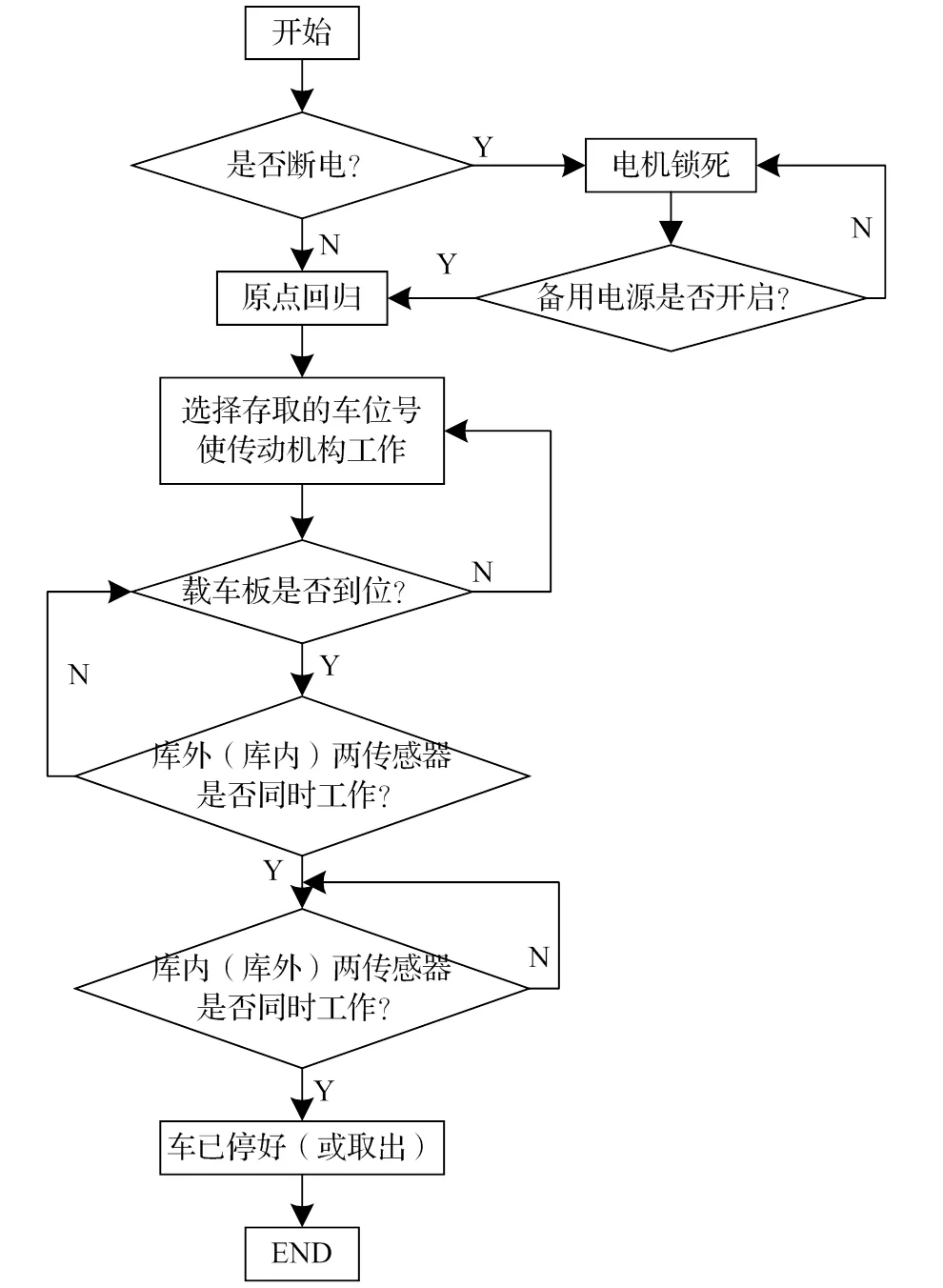
图5 存车流程图
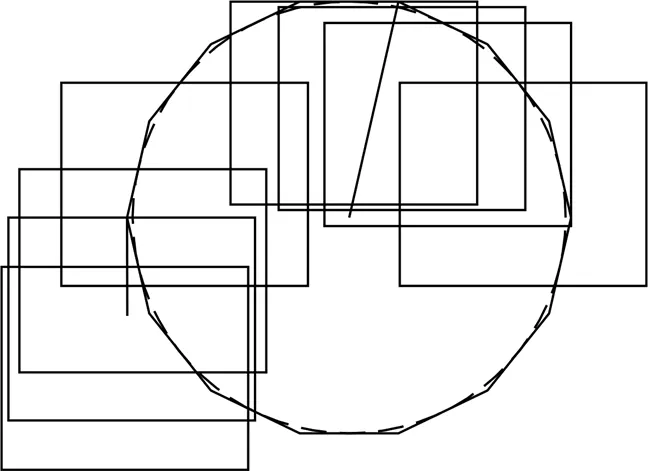
图6 八车位位置示意图
2.2 螺杆小径确定
受力分析前,先确定螺杆螺纹段的长度。由于每根螺杆啮合的滚子数必须大于2个才能稳定运行,由此可知螺杆螺纹段的长度必须大于四倍的连杆长度,又已知连杆和滑座长度为776.03 mm,取螺杆螺纹段的长度为 3200 mm。再假定固定螺杆的轴承座上下均偏移100 mm,齿轮距下轴承座100 mm。
螺杆受力分析如图7所示。
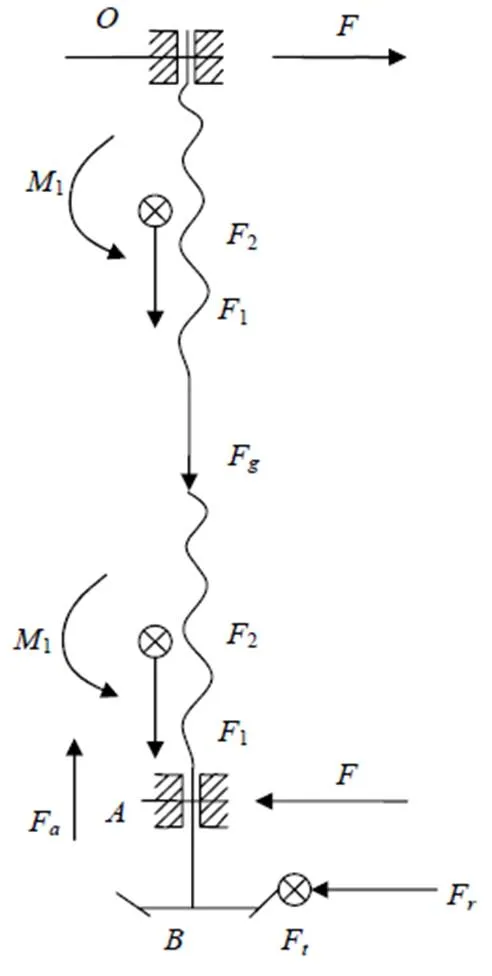
图7 螺杆受力分析图
图中:1为轴承滚子对螺杆的弯矩,N·m;2为轴承座对螺杆的弯矩,N·m;F为螺杆的轴向力,N;F为锥齿轮的径向力,N;F为锥齿轮的切向力,N;F为螺杆的自重,N;1为滚子在竖直方向上所受的力,N;2为滚子在水平方向上所的力,N;为轴承座支反力,N。
由于轴承滚子的轴径为90 mm、宽度为54 mm且轴向采用轴用弹性挡圈固定,可初步确定螺杆螺牙深度为65 mm。假设螺杆的小径为1。则轴力、扭矩如图8和图9所示。
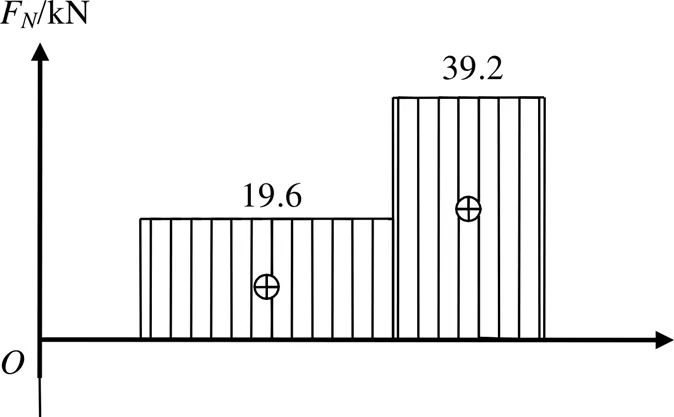
图8 轴力图
由于锥齿轮的直径还没有确定,故无法一次确定锥齿轮的径向力的准确值,但是可知锥齿轮的径向力为[9]:

式中:α为压力角,一般取标准压力角20°[9];
由图7可知,F与2都是作用在螺杆上且垂直于纸面的力,可平移至同一作用线上,即22与F达到力的平衡。2的大小代表滚子在水平方向上所能承受的最大的力的数值,超过该值便会导致滚子受力过大而损坏,所以F不
能大于22,即F≤22。根据文献[10],选取了大型车的参考重量来计算2的值,实际使用的时候会有不同重量的车进入,在理论计算时应考虑尽可能大的受力,这样更为安全,所以在这里选取2最大值为21.63,由此可得:
分别对、两点取距,根据上述所求出的作用力,可分别求出两个支座处的支反力,得出弯矩如图10所示。

图9 扭矩图
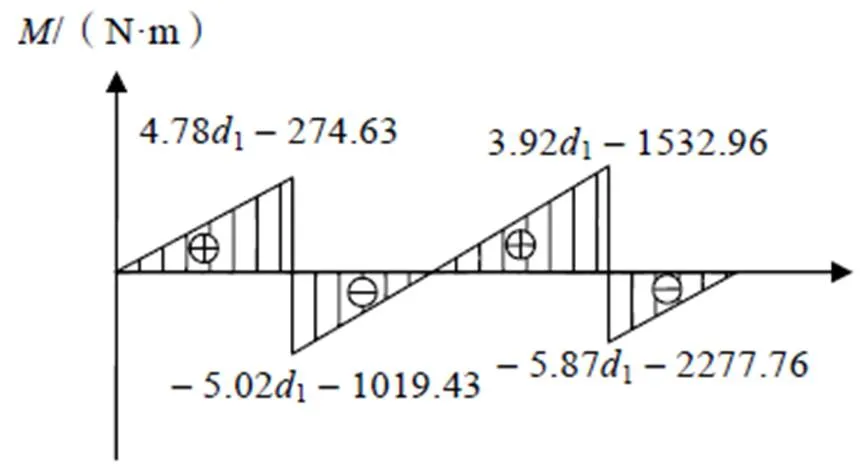
图10 弯矩图
以下为点上方的应力计算[9]。
最大切应力为:
最大弯曲应力为:
合成应力为[9]:

由以上分析计算整理得:1≥496.31 mm。
3 存取车流程
存车过程:用户将车辆行驶至装置护栏门外,下车走到PLC控制面板前[10],轻触面板上的存车选项(图11),电脑后台程序将自动选择合适的车位,并将该车位的车位号显示在屏幕上,用户轻触面板屏幕上的“确认车位号”后就可返回车上,同时电脑发出指令,装置开始运行,将该车位旋转至装置最底部并停稳,然后自动打开护栏门。门开后用户即可将车开入装置,行驶至装置刚旋转至最底部的空车架上,用户在车架上停好车后,装置上的重量感应器将信号传给电脑,电脑发出声音告知用户已将车辆停好,用户得知车已停好后就可下车并延地面上的绿色安全过道行走,走出护栏门回到控制面板前,此时面板屏幕上的显示已改变,用户在控制面板前选择“确认已停好车辆”后便可离开,在用户触屏后护栏门将关闭,装置将按电脑设计的程序再次旋转车位至合适位置。
取车过程:用户来到PLC控制面板前,轻触面板上的取车选项(图11),并点击车位号(图12),再点击“确认取车”,电脑将使装置开始运行,把指定车位旋转至最底部停稳,由感应器感应停稳后护栏门开,用户即可进入经由绿色安全过道回到车上并将车开出装置然后驶离,中途无需下车。护栏门上的传感器监测到车辆完全使出后将会把信号传给电脑,经由电脑处理后发出指令使得护栏门自动关合,并使装置再次旋转起来至一个新的平稳位置停稳,等待下一次存车或取车的指令。
图13为整体机构成品示意图,即在图1所展示的装置结构图的基础上增加其他功能结构,如护栏、地面特殊结构布置、PLC控制面板的布置,由图13可看出用户在存取车过程中的位置移动。

图11 PLC系统页面

图12 PLC系统取车页面
4 结论
本文针对安全快速存取汽车与提高停车区域空间利用率的两方面问题,设计了该螺杆型的垂直循环导轨停车装置。本装置的传动系统是本装置区别于市面上其他垂直循环停车装置的地方,创新性地螺杆运用到停车装置的传动上来,提高了装置的平稳性。通过PLC技术与机械装置相结合的方式,将存取车的过程简化为几次触屏操作从而使得车库变得更为智能,车辆存取也更加方便快捷。同时针对本装置的特性而设计的防晃装置极大程度地制止了车位在运行时可能发生的晃动,消除了车辆晃动对装置的影响,提高了车库的安全性。水平仅需两个车位的空间就可存放8辆汽车,极大提高了停车区域的空间利用率。
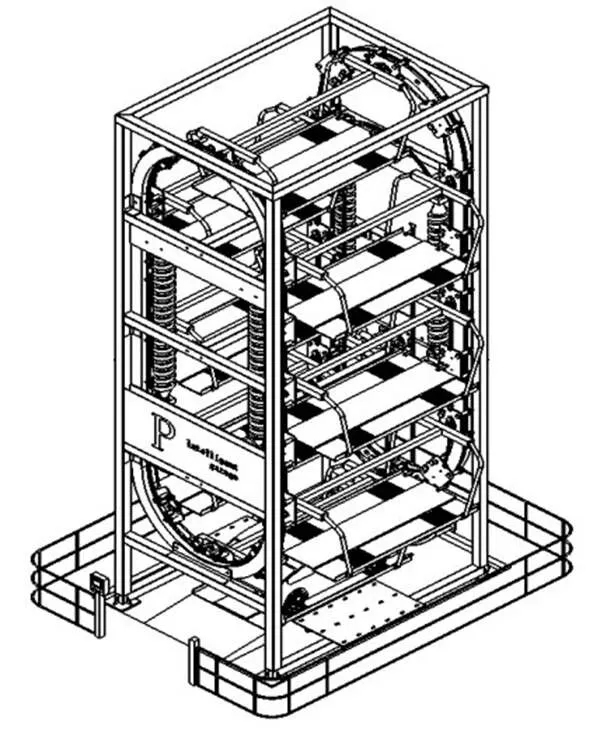
图13 装置成品图
[1]张帮泉,余佳亮,张耀林,等. 立体车库发展现状分析与推广措施研究[J]. 起重运输机械,2018(12):95-99.
[2]王选. 立体车库的发展现状及趋势研究[J]. 河北农机,2017(12):11.
[3]胡增荣. 立体车库的种类及其应用[J]. 科技经济市场,2011(4):24-26.
[4]傅云龙,陈四杰,张元军,等. 垂直循环式立体车库的设计[J]. 南方论坛,2018(8):56-57.
[5]孙恒,陈作模,葛文杰. 机械原理[M]. 北京:高等教育出版社,2013.
[6]刘腾,杜丹丰,刘培祥,等. 小型立体智能停车库的设计[J].产业与科技论坛,2016,15(7):76-77.
[7]陈超祥,胡其登. SolidWorks Motion 运动仿真[M]. 北京:机械工业出版社,2013.
[8]谢帅,祝雯豪,段锐,等. 侧方无避让式多连杆双层立体车库的设计[J]. 机械,2019,46(5):58-61.
[9]濮良贵,陈定国,吴立言. 机械设计[M]. 北京:高等教育出版社,2013.
[10]中华人民共和国住房和城乡建设部. 车库建筑设计规范:JGJ100-2015 [S]. 北京:中国建筑工业出版社,2015.
[11]徐春艳. 基于上机位与PLC的垂直升降式立体车库控制系统实现[J]. 机械,2011,38(7):72-76.
Design of a Rotary Parking Equipment
QU Yi,TIAN Haifeng,ZHOU Chuanxi,ZHOU Huajian,ZHANG Shifan
( School of Mechanical Engineering, Yangtze University, Jingzhou 434023, China)
Aiming at the problem that the number of private cars is increasing, a new anti-vibration vertical three-dimensional parking device is designed. The device is composed of six systems: drive system, transmission system, vehicle loading system, control system, anti-sway system and rack system. The complete mechanism is established through SolidWorks 3d modeling and the size of key parts is calculated. The device adopts screw drive to make the mechanical operation more stable, and equipped with anti-vibration device to improve the overall safety, and through PLC control system intelligent control can achieve low power access vehicle. The device can accommodate 8 cars at the same time, relieving the parking pressure to some extent.
rotary;parking equipment;anti-sway device;screw drive
U491.7
A
10.3969/j.issn.1006-0316.2020.04.011
1006-0316 (2020) 04-0064-06
2019-10-30
长江大学大学生创新创业训练计划项目(2018093)
曲艺(1998-),女,湖北武汉人,本科,主要研究方向为机械设计制造及自动化。
周传喜(1975-),女,湖北荆州人,工学硕士,副教授,主要研究方向为机械设计及理论的教学与研究,48763760@qq.com。
