基于关联模态云推理算法的输电塔结构损伤识别
2020-05-21郭惠勇何清林
郭惠勇,何清林
(重庆大学 土木工程学院;山地城镇建设与新技术教育部重点实验室,重庆 400045)
随着经济的发展和电力需求的日益增长,中国已建成多条特高压输电线路。输电塔是输电线路的重要组成部分,其在服役期间常会受到雨雪的腐蚀以及风致荷载的疲劳作用,从而造成结构的损伤和承载力下降,最终可能导致倒塌等严重事故,故有必要对输电塔等工程结构进行健康监测和损伤识别研究[1]。结构的损伤会降低结构的刚度等物理量,导致结构的动力特性也随之变化。因此,许多研究者利用损伤前后的动力特性参数进行损伤识别。常见的动力特性参数包括频率、振型、曲率模态、应变能、频率响应函数、柔度矩阵、残余力等[2-4]。频率识别技术虽然较为简单,但结构的固有频率对局部小损伤的灵敏度不高,而且其他原因也可能导致频率变化。例如Aktan等[5]的研究表明,结构在未损伤时,温度的改变也会导致频率产生大约5%的变化。结构的振型和曲率模态对损伤较为敏感[6],但高阶振型难以获取,在测量误差干扰下识别精度也难以保证。基于模态应变能和柔度矩阵的损伤识别方法,其实质依然是利用结构的模态参数为主构造相应的应变能和柔度矩阵进行损伤识别,但其对结构的高阶模态数据依赖性较小,可以利用较少的模态阶数得到较好的近似结果[7-8]。残余力向量法是直接利用结构的刚度矩阵、质量矩阵建立运动方程,并利用残余力向量与各杆件刚度变化量的对应关系进行损伤识别[9]。蔡小双等[10]将残余力向量法成功应用于桁架结构的损伤识别研究,并取得较好的识别效果。由于残余力向量法仅需要获取结构的一阶模态数据,并具有概念明确,简单快捷等优点,故具有一定的工程应用研究价值。
输电塔是复杂的三维杆件结构,其损伤识别较为困难。近年来,吴秀峰等[11]基于柔度理论构建了柔度曲率指标和曲率差指标,对某一酒杯型输电塔进行了损伤识别研究。霍林生等[12]则提出了基于互相关函数幅值和支持向量机相结合的损伤识别法,对一输电塔的损伤进行了检测研究。由于输电塔损伤识别不仅会受到数量众多的杆件影响,而且还会受到测量噪声等不确定因素干扰,采用传统的方法难以进行具有可靠性的损伤识别。笔者提出一种基于关联模态的云推理算法,并通过算例分析对输电塔的损伤识别进行分析。
1 残余力向量法
1.1 残余力方程
一个n自由度系统的振动微分方程为

(1)
(K-λiM)φj=0
(2)
式中:λj、φj是结构的第j阶特征值和特征向量。结构损伤会引起如下物理量变化
Kd=Ku-ΔK,Md=Mu-ΔM
(3)
式中:Ku、Mu、Kd、Md分别是损伤前后的刚度和质量矩阵;ΔK、ΔM则是相应的刚度和质量矩阵的变化量。损伤后的特征方程为
(Kd-λdjMd)φdj=0
(4)
式中:λdj、φdj是损伤后的第j阶特征值和特征向量。
将式(3)代入式(4),可得
(Ku-λdjMu)φdj=(ΔK-λdjΔM)φdj
(5)
令Rj=(Ku-λdjMu)φdj,以及考虑裂缝等损伤对于刚度有显著影响,但对于质量影响很小,故可忽略ΔM项,则式(5)可简化为[9-10]
ΔKφdj=Rj
(6)
式中:Rj是残余力向量,该项与损伤引起的刚度变化量密切相关。
1.2 基于残余力的损伤识别
多自由度桁架结构的整体刚度矩阵K及其刚度变化矩阵ΔK可分解为[9-10]
K=APAT;ΔK=AΔPAT
(7)
式中:对角阵P=diag(k1,k2,…,km);对角阵ΔP=diag(Δk1,Δk2,…,Δkm);ki和Δki是第i根杆的轴向刚度和刚度变化量;m是杆件总数;A是n×m阶刚度联系矩阵。由于ΔP是对角矩阵,利用式(7)可将ΔK的元素表示为ΔKij=
[Ai1Aj1,Ai2AJ2,…,AimAjm][Δk1,Δk2,…,Δkm]T
(8)
利用刚度矩阵K中元素对第η个单元的敏感性分析可得
(9)
并利用式(8),可得
(10)
利用式(10)可求得刚度联系矩阵A。令矩阵A的第i列表达为向量ai,则公式(8)可整合为
(11)
将式(11)代入式(6),化简可得
Aγ=Rj
(12)
式中:残余力指标γ=[γ1,γ2,…,γm]T,其第i个分量为
γi=ΔkaaiTφdj
(13)
利用式(12)和式(13)可求出损伤程度,但由于输电塔结构的自由度n与杆件数目m往往不一致,刚度联系矩阵A不是正方阵,只能采用广义逆等有偏方法求解损伤,以及考虑测量误差等的影响,采用残余力向量法难以准确求解复杂的塔架体系,故进一步采用云推理方法以提高识别可靠性。
2 基于云推理的损伤识别
2.1 云模型
云模型是定性概念和定量数据之间的不确定性转换模型,可有效地处理随机性与模糊性所造成的不确定问题。云模型主要通过3个数字特征来反映事物的随机性与模糊性,这3个数字特征包含期望Ex、熵En、超熵He[13]。
期望Ex:是论域空间中可表示定性概念的值,也是定性概念量化的最典型样本。云滴在论域空间的分布越集中,则表示对该概念的认识越统一,相反,则说明对概念的认知越不稳定。
熵En:是定性概念不确定性度量,可反映代表定性概念云滴的离散程度,该数字特征由概念的随机性和模糊性共同决定。
超熵He:是熵的不确定性度量,反映了定量论域上对定性概念有贡献的所有点的不确定性聚集程度。
2.2 基于残余力的云推理
基于残余力指标可以建立相应的残余力云推理算法。目前,并无与此相同的方法,在此基础上,可以进一步提出改进的关联模态云推理算法,以提高损伤识别的可靠性。云推理算法需要利用前件云和后件云发生器。前件云是利用定量论域中的数值x生成相应的确定度,后件云则是利用定量论域中的确定度μ生成相应的估计值。
前件云的运行规则为:利用云的数字特征(Ex、En、He)以及定量论域U上特定的数值x0,首先生成以En为期望值、He为标准差的正态随机数En′;再生成相应的确定度μr=exp[-(x0-Ex)2/(2Enr2)],最后产生云滴drop(x0,μr)。
后件云的运行规则为:利用云的数字特征和定性概念C上的确定度0以及所需生成的云滴数,首先生成以En为期望值、He为标准差的正态随机数En′;再生成相应的值最后产生云滴drop(xr,μ0)。
还需要建立云推理的规则库,具体方法为:首先设立结构的损伤程度区间并确立多个损伤模式,例如,可设立[c1,c2]、[c2,c3]、……、[cl,cl+1]共l个损伤模式,其中,ci为损伤模式界限值。基于损伤模式的界限值,利用结构有限元模型和界限值对应的残余力指标可建立前件规则库。利用损伤程度区间可建立后件规则库,两种规则库可统一匹配为定性规则库。而规则库的建立均采用灰云模型[14]计算。利用界限值可得灰云模型的期望、熵、超熵。则第i模式的期望、熵、超熵为
Exi=(ci+ci+1)/2
(14)
(15)
(16)
式中:p是云熵的离散度因子。
最后通过规则发生器,结合定性规则库和云发生器可实现损伤识别过程,并生成云推理系统。具体运行时可利用实际损伤后含不确定噪声干扰的多次测量数据作为输入值,通过云滴化和规则发生器可得到带有确定度信息的云滴作为输出值,得到足够多的云滴之后,再采用精确化方式获得最终输出值。笔者采用的精确化方式为加权平均方法,以输出云推理的计算值,具体为
(17)

2.3 改进的关联模态云推理
由于残余力向量法采用的是有偏估计进行损伤识别,而基于残余力指标的云推理算法也会受到该有偏估计干扰。在结构较为复杂以及测量噪声的不确定干扰下,基于残余力的识别结果往往会失真,故借鉴残余力向量法,提出了一种基于关联模态的云推理算法。具体是利用残余力向量法中的刚度联系矩阵A构建一种关联模态指标。由于结构损伤前后的刚度联系矩阵不会发生改变,则可建立第j阶关联模态指标Tj
(18)
式中:刚度联系矩阵可表示为A=[a1,a2,…,am]的形式,其中ai为第i根杆件的单元刚度联系向量;m为结构杆件总数。与基于残余力的方法相比,关联模态指标是仅与结构振型相关的参数,通过刚度联系矩阵的转换后则会产生对应杆件的计算值,故可采用关联模态指标作为云推理参数。将残余力指标替换为关联模态指标并重新建立云推理系统,详见图1,图中的关联模态数据可利用式(18)并结合测量模态数据来获取。主要变化是利用关联模态指标构建前件规则库,利用损伤程度区间模式建立后件规则库,两者匹配组成新的定性规则库,并将测量的模态数据转化为关联模态数据作为输入值。该方法避免了残余力的近似求解问题,故具有更高的可靠性。该方法可简称为关联模态云推理算法。

图1 关联模态云推理系统Fig.1 Cloud reasoning System based on associated mode
3 数值计算
输电塔结构如图2(a)所示,该三维有限元结构模型一共有116根杆件、30个节点。节点理论自由度数为90,考虑底端的约束,其实际自由度数为78。杆件尺寸见图2(b),其结构材料参数信息为:各杆件截面面积为A=0.001 m2,弹性模量E=7.2×1010Pa,密度ρ=2 800 kg/m3。拟采用第1阶模态数据进行损伤识别,其中云推理参数为:损伤模式数为6,界限值为0、0.1、0.2、0.3、0.4、0.5、0.6,云熵的离散度因子p=10。选取离散度因子的数值为10,该值既可以使云模型的熵具有一定的离散变化性,又能防止过大的变化性使其失去规律性。
由于测量数据常会受到噪声等不确定因素干扰,在数值计算中,需要将人工噪声添加到模态数据中,Udwadia[15]提出的噪声模拟方法随机性更强,也更接近于真实测量情况。故采用Udwadia方法来模拟受噪声干扰的实验测量数据
Φki(exp)=Φki(cal)·(1+α·ξ)
(19)
式中:Φki(exp)为第i阶模态第k位的试验测量数据;Φki(cal)为第i阶模态第k位的理论计算值;α为噪声水平;ξ为服从标准正态分布的随机数。该噪声模拟方法使每个自由度均有不同的随机数,故具有较强的随机性。笔者仅采用1阶模态进行损伤识别研究,考虑到测量噪声等引起的不确定性,采用了20次随机测量数据作为云推理的输入值,而对于残余力向量法则采用了20次测量的模态均值。具体损伤工况如表1所示。

图2 输电塔模型和尺寸Fig.2 Transmission tower model and size
表1 输电塔结构的损伤工况
Table 1 Damage cases for transmission tower structure

工况1杆件(节点号)损伤程度/%工况2杆件(节点号)损伤程度/%工况3杆件(节点号)损伤程度/%80 (17, 3)255 (22, 16)2010 (3, 9)2083 (25, 18)2550 (8, 9)2074 (9, 23)20
关联模态云推理算法的具体步骤和过程为:
1)根据结构的损伤程度区间确立多个损伤模式,设立[0,0.1]、[0.1,0.2]、……、[0.5,0.6]共6个损伤模式,基于损伤模式的界限值,利用结构有限元模型和损伤界限值对应的关联模态界限值可建立前件云规则库。利用损伤模式界限值可建立后件云规则库,均采用灰云模型计算相应的峰值、熵以及超熵。两种规则库可合成关联模态定性规则库。
2)利用实际损伤后含不确定噪声干扰的多次测量数据,结合前件云发生器生成不同损伤模式下的多个云滴的确定度数值,再结合后件云发生器生成不同损伤模式下的多个云滴的损伤生成值,从而构成许多不同的(xb,μ)云滴。
3)进行6种模式下云滴的加权计算,每个单元均可以计算出加权值,具体采用式(17)计算每个单元的关联模态云推理计算值并输出结果。
残余力云推理算法的步骤与关联模态云推理算法的步骤类似,只是将关联模态数据替换为残余力数据。残余力向量法则可以直接利用式(12)并通过求广义逆获取残余力损伤指标。
3.1 工况1
工况1为单损伤问题,输电塔的80号杆件发生25%的刚度损伤。采用残余力向量法、残余力云推理算法、关联模态云推理算法进行了损伤识别。残余力向量法的损伤识别结果如图3所示,由图3可知,当噪声水平α为0时,残余力向量法可以有效地识别出损伤位置,80号杆件的损伤计算值高于其他杆件;当噪声水平α为2%时,残余力向量法的识别结果明显失真,其损伤程度已经超出了正常范围[0,1]。这主要是由于输电塔结构复杂且杆件众多,共有116根杆件和78个自由度,由于杆件数目和自由度数不一致,则采用式(12)求解时只能采用广义逆求解,而杆件未知量数目远远大于方程数目,则只能采用近似的最小范数求解,笔者又利用了随机性较强的式(19)加噪方式,使每个自由度值受到了不同的随机干扰,故仅2%的噪声已经使识别结果完全失真。
基于残余力的云推理识别结果如图4所示。由图4可知,当噪声水平α为0时,残余力云推理算法可以有效地识别出损伤位置,80号杆件的损伤值也明显高于其他杆件;当噪声水平α为2%时,残余力云推理算法的识别结果虽然没有超出正常范围[0,1],但也已无法识别出正确的损伤位置。这主要是由于输电塔杆件数远远大于自由度数,求残余力值时依然需要利用近似的最小范数解,再加上随机噪声引起的进一步干扰,使损伤识别结果已经完全失去了可靠性。

图3 工况1残余力向量法的识别结果Fig.3 Identification results of residual force vector method for Case 1

图4 工况1残余力云推理算法的识别结果Fig.4 Identification results of cloud reasoning algorithm based on residual force for Case 1
基于关联模态的云推理识别结果如图5所示。由图5可知,当噪声水平α为0时,关联模态云推理算法可以较好地检测出损伤位置,80号杆件的计算结果也明显高于其他杆件;当噪声水平α为2%时,关联模态云推理算法依然具有较好的损伤识别能力,80号杆件的损伤指标仍明显高于其他杆件;故继续增大噪声水平到4%,此时,关联模态云推理算法仍具有一定的损伤识别能力,但杆件2和6的计算值已经具有了一定的干扰影响。当噪声水平继续增大时,可能会进一步影响关联模态云推理算法的损伤识别结果。在实际应用中,可以通过选取精度较高的传感器来防止噪声水平过大引起的问题。关联模态法避开了求解残余力的最小范数法,利用了简单的关联模态数据直接进行云推理计算,故具有更好的抗噪能力。
3.2 工况2
工况2为双损伤问题,结构的5和83号杆件分别有20%和25%的损伤。依然采用残余力向量法、残余力云推理算法、关联模态云推理算法进行损伤识别。残余力向量法的损伤识别结果如图6所示。由图6可知,当噪声水平α为0时,残余力向量法可以识别出杆件83,而对杆件5的识别效果不明显;当噪声水平α为2%时,残余力向量法的识别结果明显失真,其损伤程度已经超出了正常范围[0,1]。说明对于复杂的三维输电塔结构,残余力向量法即使在不考虑测量误差的前提下,其对于多损伤的识别效果依然欠佳,而在考虑测量噪声时,其识别结果明显失真。
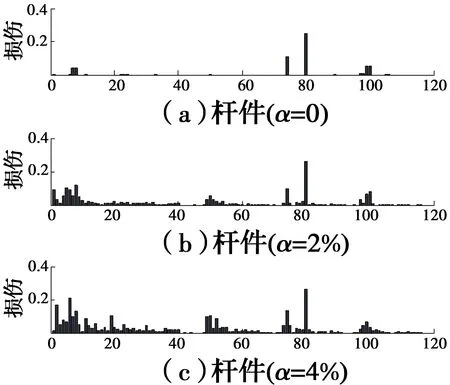
图5 工况1关联模态云推理算法的识别结果Fig.5 Identification results of cloud reasoning algorithm based on associated mode for Case 1
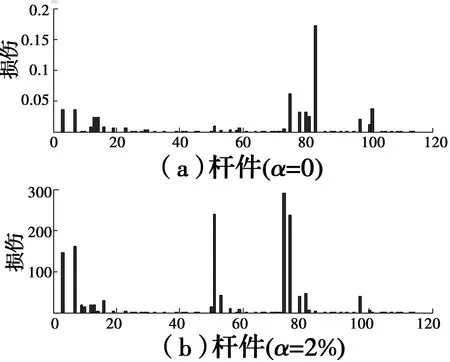
图6 工况2残余力向量法的识别结果Fig.6 Identification results of residual force vector method for Case 2
基于残余力的云推理识别结果如图7所示。由图7可知,当噪声水平α为0时,残余力云推理算法可以识别出杆件83,而对杆件5的识别效果不明显;当噪声水平α为2%时,残余力云推理算法的识别结果虽然没有超出正常范围[0,1],但明显地失去了损伤识别能力。说明基于残余力指标的云推理算法和残余力向量法具有一定的相关性,都难以对复杂杆件结构进行损伤识别,特别是当塔架结构的杆件数远远大于自由度数时,求残余力值需要利用近似的最小范数解,再加上随机噪声引起的不确定干扰,故识别结果已完全失去可靠性。
基于关联模态的云推理识别结果如图8所示。由图8可知,当噪声水平α为0时,关联模态云推理算法可以较好地检测出损伤位置,杆件5和83的计算结果明显高于其他杆件;当噪声水平α为2%时,关联模态云推理算法依然具有较好的损伤识别能力,杆件5和83的损伤计算值仍明显高于其他杆件;当噪声水平α为4%时,关联模态云推理算法仍具有一定的损伤识别能力,但杆件4、6、7、51等的计算值已经具有了一定的干扰影响。故基于关联模态的云推理算法具有一定的抗噪能力。

图7 工况2残余力云推理算法的识别结果Fig.7 Identification results of cloud reasoning algorithm based on residual force for Case

图8 工况2关联模态云推理算法的识别结果Fig.8 Identification results of cloud reasoning algorithm based on associated mode for Case
3.3 工况3
工况3为三损伤问题,杆件10、50、74均发生20%的损伤。依然采用3种方法进行损伤识别,残余力向量法的损伤识别结果如图9所示,由图9可知,当噪声水平α为0时,残余力向量法的识别效果欠佳,虽可以识别出杆件10和50,而对杆件74无法识别,并错误地识别出杆件73;当噪声水平α为2%时,残余力向量法的识别结果明显失真,其损伤程度已经超出正常范围[0,1]。说明对于复杂的三维输电塔结构,残余力向量法即使在不考虑测量误差的前提下,其对于多损伤的识别效果依然欠佳,而在考虑测量噪声时,其识别结果明显失真。

图9 工况3残余力向量法的识别结果Fig.9 Identification results of residual force vector method for Case 3
基于残余力的云推理算法的识别结果如图10所示。由图10可知,当噪声水平α为0时,残余力云推理算法的识别效果欠佳,其明显对杆件73和98产生了误识别现象;当噪声水平α为2%时,残余力云推理算法的识别结果虽然没有超出正常范围[0,1],但明显地失去了损伤识别能力。说明基于残余力指标的云推理方法对于复杂塔架结构的识别效果欠佳,在考虑测量噪声时,识别结果已经完全失真。

图10 工况3残余力云推理算法的识别结果Fig.10 Identification results of cloud reasoning algorithm based on residual force for Case 3
基于关联模态的云推理识别结果如图11所示。由图11可知,当噪声水平α为0时,关联模态云推理算法可以较好地识别出损伤位置,杆件10、50、74的计算结果明显高于其他杆件;当噪声水平α为2%时,关联模态云推理算法依然具有较好的损伤识别能力,实际损伤杆件的计算值依然高于其他杆件;当噪声水平提高为4%时,关联模态云推理算法仍具有一定的损伤识别能力,但是,杆件8等的计算值已经具有了一定的干扰影响。故基于关联模态的云推理算法具有更好的损伤识别能力。由于求解残余力时需要利用最小范数法,该方法对测量噪声干扰较为敏感,故基于残余力的损伤识别方法抗噪能力相对较低,而关联模态方法避开了求解残余力的最小范数法,直接利用了简单的关联模态数据进行云推理计算,故具有更好的抗噪能力。

图11 工况3关联模态云推理算法的识别结果Fig.11 Identification results of cloud reasoning algorithm based on associated mode for Case 3
由以上3个损伤工况可知,当不考虑测量噪声时,残余力向量法和残余力云推理算法对于单损伤的识别效果较好,对于多损伤情况则识别效果欠佳。当考虑测量噪声时,残余力向量法和残余力云推理算法已经完全失真。说明对于输电塔这类复杂的三维塔架结构,在残余力的近似计算和测量噪声的双重影响下,基于残余力的相关方法已经丧失了损伤识别能力。而建议的关联模态云推理算法,即使在测量噪声的干扰下,也具有一定的损伤识别效果。由于在工程实际中,测量噪声等干扰引起的数据不确定问题是不可避免的,特别是对三维复杂结构的影响更大,故有必要发展对于较复杂结构具有更好抗噪性能的损伤识别技术。相对于残余力向量法和残余力云推理算法,建议的关联模态云推理算法具有相对较好的抗噪能力和损伤识别效果。
4 结论
提出了一种关联模态云推理算法以解决三维塔架结构在测量噪声等不确定因素干扰下的损伤识别问题。首先描述了残余力方程以及基于残余力向量的损伤识别理论;然后基于残余力指标提出了不确定云推理算法,描述了云模型的数字特征,建议了适用于损伤识别领域的前件云发生器、后件云发生器、规则发生器和基于残余力指标的定性规则库;最后提出了一种基于关联模态的云推理算法,并建立了相应的定性规则库和云推理系统。通过数值仿真和理论分析,可得出以下结论:
1)对于输电塔等三维塔架结构,残余力向量法和残余力云推理算法的识别效果欠佳。这主要是由于该类结构的杆件数较多且往往大于节点自由度数目,使该类方法难以求出精确解,在进一步的不确定噪声干扰下,识别结果就会失真。
2)关联模态云推理算法具有较好的识别效果,即使在测量噪声干扰下,也具有一定的损伤识别能力。
笔者主要是提出了一种测量噪声干扰下的损伤定位方法,如需进行损伤程度分析,可以采用该方法与遗传算法等相结合的二阶段方法,在第1阶段采用该方法进行较为准确的损伤定位,在第2阶段采用模态数据和遗传算法等相结合,可以对已经识别出的损伤单元进行二次定量分析。该研究的重点是如何在测量噪声环境下进行较为准确的损伤定位。
