联合收割机传动系统设计与仿真分析
2020-05-20姜文瀚王玉林耿超李志峰
姜文瀚 王玉林 耿超 李志峰
摘要:针对联合收割机在田间作业时路面不平度对整车动力系统产生的影响,以及动载荷的随机性对行走操控性的影响,本文主要对联合收割机传动系统进行设计与仿真。给出了联合收割机驱动系统的工作原理及主要元件参数,并基于AMESim仿真软件,建立传动系统液压仿真模型,从液压系统的起步、田间作业、转场越障3种工况分析液压系统的性能。仿真结果表明,车辆起步過程加速平稳,液压系统的压力输出和流量符合设计车辆实际工况的需求;田间作业时,闭式静液传动系统中泵和马达具有较高的容积效率;在转场越障过程中,泵和马达流量可保持相对稳定,说明收割机静液压传动系统在跨越障碍时,有着良好的通过性能。该设计能够实现整车平稳工作,提高收割机作业时越障能力和工作效率,满足设计要求。该研究具有广泛的应用前景。
关键词:联合收割机; 静液压传动; AMESim; 工况分析; 驱动系统; 载荷
中图分类号: TH137; S225.3; U463.5文献标识码: A
文章编号: 1006-9798(2020)02-0110-06; DOI: 10.13306/j.1006-9798.2020.02.017
目前,我国农机行业进入转型换代阶段,逐渐向环保、舒适、高端化发展,这不仅促进了我国农机发展,还进一步推动了农业发展[1-2]。现代农业生产中对农机的效率、舒适性和可靠性提出了新的要求[3-4],传统联合收割机的性能急需提高,其中传动系统是决定收割机动力性、可靠性、收割效率和寿命等性能的关键,开发高效率高可靠性的联合收割机传动系统尤为重要[5-8]。近年来,许多学者对联合收割机的传动系统进行了研究,陈恒峰等人[9]通过设计改进了新疆C-2型联合收割机的液压驱动行走系统,提高了其启动和转向时液压系统的稳定性,因而使整车性能得到提升;谢斌等人[10]基于Adams建立了车-路相互作用模型,利用加权加速度均方根法对某国产联合收割样机行驶平顺性进行评价;赵姗等人[11]对采用静液压传动的联合收割机进行AMESim仿真分析,仿真结果显示,联合收割机执行机构会根据其工作环境的变化来调整压力输出,提高工作稳定性。以上研究均采用静液压传动系统。因此,本文基于AMESim仿真软件,建立了闭式静液压传动系统[12-14]仿真模型,并分别对联合收割机的起步、田间作业和越障3种工况进行模拟分析,分析结果表明,所设计的闭式静液压传动系统方案能有效减少载荷对传动系统的冲击度,满足联合收割机行走系统设计要求。该研究对液压驱动系统的优化与改进提供了理论依据。
1联合收割机驱动系统
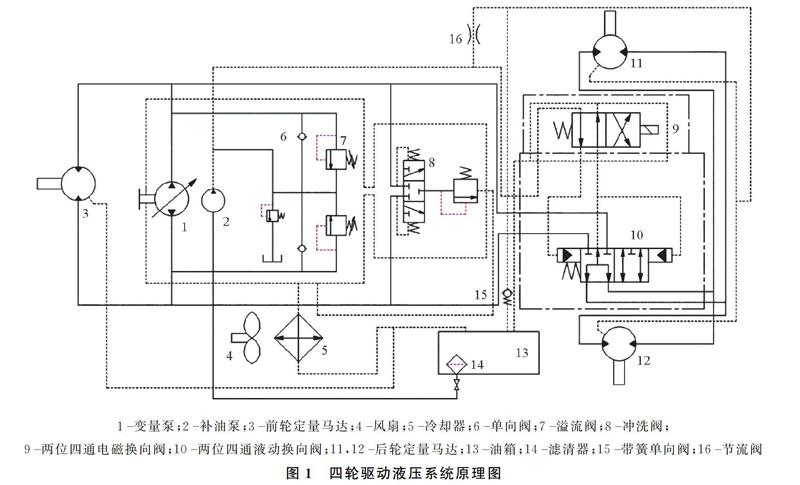
驱动系统是联合收割机的核心系统之一,本文在基于前轮驱动后轮转向的基础上,重新设计驱动方式,确定四轮驱动整体方案。前轮采用变量泵-高速定量马达组合,后轮采用变量泵-低速定量马达组合,前后轮共用同一变量泵驱动,整体采用一变量泵三马达传递动力。在本设计方案中,前轮为主驱动轮,在必要工况时,后轮辅助驱动,四轮驱动液压系统原理图如图1所示。
液压系统包括了前轮驱动系统、后轮驱动系统、补油回路,冲洗回路以及散热系统。收割机前轮驱动和四轮驱动方式之间的转换,通过两位四通电磁换向阀和两位四通液动换向阀控制。当电磁阀关闭时,液动阀左位连通,后轮马达进出口压力相等,液压系统中只有前轮马达处于工作状态,此时车辆只在前轮驱动下行驶;当电磁阀通电打开时,液动阀右位连通,液压系统中后轮马达与前轮马达并联驱动,实现四轮驱动模式。
2联合收割机传动系统主要元件参数
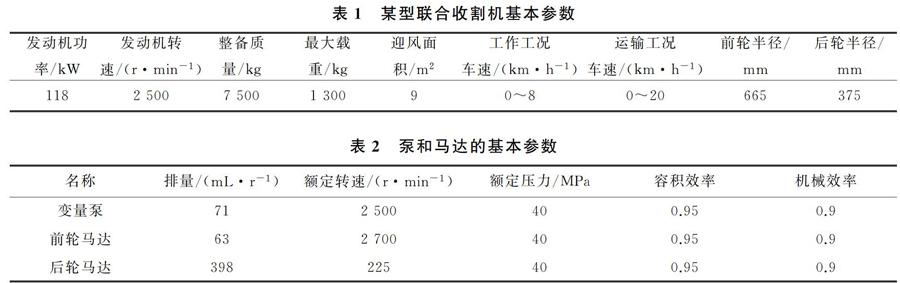
本设计方案中,某型联合收割机基本参数如表1所示。经计算,前轮液压马达选用力士乐A2FM63/61W型定量马达[15];后轮低速马达选用波克兰公司生产的MSE02系列定量马达[16];变量泵选用力士乐A4VG71规格的变量泵[17]。液压系统中,补油泵的最小排量一般为所有液压元件排量之和的10%,故补油压力在1.8~23.4 MPa范围内[18],选型的变量泵内置辅助作用的补油泵[19],故匹配排量为20 mL/r的补油泵即可满足要求。泵和马达的基本参数如表2所示。
3联合收割机闭式静液压传动系统的仿真
3.1液压系统仿真模型的建立
根据联合收割机闭式静液压传动系统的工作原理,结合各元件仿真参数,在AMESim仿真软件中,建立传动系统液压仿真模型,联合收割机闭式静液传动系统液压模型如图2所示。该模型主要由5种元件子模型组成:变量泵控制模型(实现变量泵在起步过程中的压力调节)、补油回路模型(主要由单向阀、溢流阀、补油泵及油箱组成)、前轮定量马达模型、冲洗阀模型(交换闭式液压系统的回路热量)以及整车模型(由TRVEH03车辆动载荷模型和4个TRTY01C轮胎模型组成)。主要从以下3个方面分析液压系统的性能:车辆起步时,液压系统中泵的压力和马达压力变化;田间作业工况下,液压系统的稳定性;转场过程中,越障碍时的液压系统抗突变能力。分别对这3种工况下的收割机进行仿真计算,并对仿真结果进行分析。
3.2起步工况
当收割机于平路面作业档起步时,单前轮与单后轮滚动阻力矩分别为614 N·m和231 N·m。将前后轮力矩信号作为输入加载到各个车轮上,设置仿真时间为15 s,在起步工况下,变量泵输出流量随时间变化曲线如图3所示,变量泵压力随时间变化曲线如图4所示。由图3和图4可以看出,变量泵的输出流量随时间的增加而逐渐增大,起步加速阶段变量泵输出压力为12.5 MPa。
在起步工况下,车速随时间变化曲线如图5所示,由图5可以看出,车速匀加速至7.2 km/h时,变量泵的输出压力逐渐降低并稳定在9.5 MPa。泵与马达输出流量时间变化曲线如图6所示,由图6可以看出,车辆起步过程加速平稳,液压系统没有额外的流量损失,压力输出和流量符合设计车辆实际工况的需求。
3.3田间作业工况
以F级路面模拟联合收割机田间作业工况下,得到的负载变化曲线做为负载扭矩输入信号,在车辆启动后第10 s加载到仿真模型上[20]。设置仿真时间为20 s,田间作业工况下,负载扭矩随时间变化曲线如图7所示[20],变量泵输出流量随时间变化曲线如图8所示,由图7和图8可以看出,收割机在起步运行后进入田间作业时,变量泵的输出流量基本保持稳定,输出压力振荡变化。
田间作业工况下,变量泵输出压力随时间变化曲线如图9所示,由图9可以看出,定量马达的输入压力也随着负载的变化而变化,其变化范围皆在8.5~11 MPa之间小幅振荡变化,冲击度不大。定量马达输入压力随时间变化曲线如图10所示,由图9和图10可以看出,定量马达输入压力随时间变化曲线与变量泵输入压力随时间变化曲线吻合度很高,定量马达与变量泵二者之间几乎没有压力损失,泵和马达具有较高的容积效率。
在田间作业工况下,车速随时间变化曲线如图11所示,当进入田间不平路面作业时,整机速度保持稳定,时速稳定在5.6 km/h,符合田间作业的车速要求。泵和马达流量对比随时间变化曲线如图12所示。由图12可以看出,在闭式静液传动系统中没有额外的溢流损失,联合收割机稳定作业。
3.4转场过程越障工况
同样采用文献[20]给出的越障时负载变化曲线做为负载扭矩输入信号,在车辆启动后第10 s加载到仿真模型上,设置仿真时间为25 s,变量泵输出流量随时间变化曲线如图13所示。由图13可以看出,仿真至第10 s时开始跨越障碍,液压系统所受负载瞬间增大,泵的输出流量有所减少,流量波动的幅度较小。变量泵压力随时间变化曲线如图14所示,由图14可以看出,在跨越障碍的过程中,变量泵的压力上升比较明显,最高压力可达25 MPa,由于变量泵的最高允许压力为45 MPa,所以没有出现超负荷运转情况。
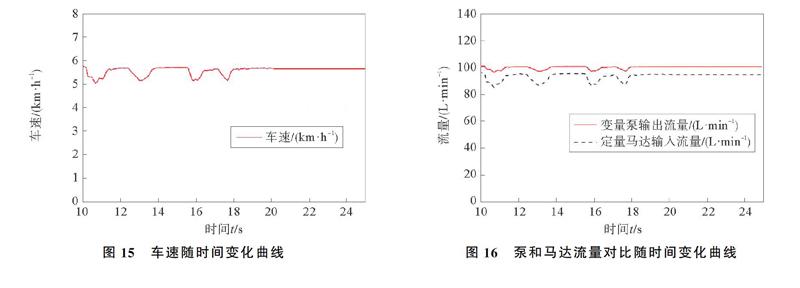
车速随时间变化曲线如图15所示,由图15可以看出,越障过程中车速出现较小波动,其波动范围为5~5.7 km/h。泵和马达流量对比随时间变化曲线如图16所示,由图16可以看出,在越障过程中,泵和马达流量能保持相对稳定,使系统有效工作,表明收割机静液压传动系统在跨越障碍时,有着良好的通过性能。
4结束语
本文在联合收割机行走系统原有基础上增加了后轮辅助驱动系统,完成了联合收割机闭式静液传动液压系统的设计。利用田间作业和越障工况下的负载变化,基于AMESim软件对液压系统在起步、田间作业和跨越障碍3种工况下模拟仿真。仿真结果表明,闭式静液压传动系统中泵和马达具有较高的容积效率,能有效减少作业工况下路面不平度对传动系统的影响。闭式静液压传动系统适用于联合收割机行走系统的改进,对整车通过性和越障能力有明显提升。由于AMESim在理想状态下的模拟仿真无法涵盖所有实际状况,该系统仍需在实验过程中进一步优化。该研究在实际生产中具有一定的应用前景,为以后联合收割机综合性能提升等方面的研究提供了参考价值。
参考文献:
[1]南农. 2017中国农机化发展白皮书[J]. 南方农机, 2018, 49(9): 6.
[2]王刚, 吴崇友, 伍德林. 我国通用型联合收割机现状与发展思考[J]. 中国农机化学报, 2013, 34(6): 6-8, 26.
[3]张立彬. 静液驱动系统在农机领域的应用[J]. 液压气动与密封, 2014(10): 78-80.
[4]陈恒峰, 郭辉, 曹廷, 等. 联合收割机液压底盘发展现状及趋势分析[J]. 农业科技与装备, 2016(3): 22-24.
[5]陈庆文, 韩增德, 崔俊伟, 等. 自走式谷物联合收割机发展现状及趋势分析[J]. 中国农业科技导报, 2015, 17(1): 109-114.
[6]董宝田, 朱礼逊, 尚海波, 等. 液力传动与静液压传动牵引车的性能对比[J]. 工程机械, 2001(11): 10-13, 16.
[7]Andrews S B, Siebenmorgen T J, Vories E, et al. Effects of combine operating parameters on harvest loss and quality in rice[J]. Transactions of the Asae, 1993, 36(6): 1599-1607.
[8]Simbahan G C, Dobermannn A, Ping J L. Site-specific management screening yield monitor data improves grain yield maps[J]. Agronomy Journal, 2004, 96(4): 1091-1102.
[9]陳恒峰, 郭辉, 吕全贵, 等. 新疆C-2联合收割机液压驱动系统的设计与仿真[J]. 农机化研究, 2018, 40(6): 81-85.
[10]谢斌, 李静静, 鲁倩倩, 等. 联合收割机制动系统虚拟样机仿真及试验[J]. 农业工程学报, 2014, 30(4): 18-24.
[11]赵姗, 杨俊茹, 李瑞川. 联合收割机行走液压系统仿真分析[J]. 湖北农机化, 2019(7): 49-52.
[12]王岩, 张永龙, 秦绪情. 车辆静液传动液压系统研究现状及发展趋势[J]. 机床与液压, 2015. 43(13): 149-155.
[13]何国旗, 罗智勇, 曹永梅. 轮式装载机静压传动与液力传动的性能分析与比较[J]. 液压与气动, 2006(12): 2-7.
[14]谢宇航, 王世成. 工程车辆液压传动系统构成分析及工作参数配置[J]. 汽车实用技术, 2017(20): 135-138, 163.
[15]Bosch Rexroth公司. 行走机械液压产品样本-液压马达[Z]. Germany: Bosch Rexroth公司, 2007.
[16]波克兰公司. 模块化液压马达技术样本[Z]. 法国: 波克兰公司, 2013.
[17]Bosch Rexroth公司. 行走机械液压产品样本-液压泵[Z]. Germany: Bosch Rexroth公司, 2007.
[18]王佃武. 闭式液压系统补油泵参数的设计[J]. 机床与液压, 2013, 41(8): 77-78.
[19]桑月仙, 于兰英. 闭式液压系统补油泵研究[J]. 机械工程与自动化, 2010(6): 83-85.
[20]耿超. 联合收割机闭式静液传动系统的研究开发[D]. 青岛: 青岛大学, 2019.
Design and Simulation of Combine Harvester Drive System
JIANG Wenhan, WANG Yulin, GENG Chao, LI Zhifeng
(School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China)
Abstract:Aiming at the fact that the unevenness of the road surface during field operation has a great impact on the combine harvesters power system and that the walking maneuverability is impacted by the randomness of the dynamic load, this paper mainly designs and simulates the drive system of the combine harvester. With the given working principle and main component parameters of the combine harvester drive system, and based on the AMESim simulation software, a hydraulic simulation model of the transmission system is established. The hydraulic system is then analyzed during three operating conditions: the start of the hydraulic system, field operation, and surmounting obstacles. The simulation results show that the vehicle accelerates smoothly during the starting process, and the pressure output and flow of the hydraulic system meet the requirements of the actual working conditions of the designed vehicle. During field operation, the pump and motor in the closed hydrostatic transmission system are of high volumetric efficiency. During the obstacle course, the flow of the pump and motor can be kept relatively stable, which indicates that the hydrostatic drive system of the harvester has good passing performance when it crosses the obstacle. The design effectively reduces the impact of the load on the transmission system, realizes the smooth operation of the whole vehicle, improves the obstacle surmounting ability and working efficiency of the harvester during operation, and meets the design requirements. This research has a wide range of application prospects.
Key words:combine harvester; hydrostatic drive; AMESim; working condition analysis; drive system; load
收稿日期: 2019-12-27; 修回日期: 2020-02-26
作者簡介: 姜文瀚(1993-),男,山东青岛人,硕士研究生,主要研究方向为液压与电控。
通信作者: 王玉林(1964-),男,工学博士,教授,硕士生导师,主要研究方向为液压与电控。 Email: wangyuln@163.com
