基于模型设计的电动助力转向系统策略研究
2020-05-20刘世杰严天一贾兆功陆金更林军
刘世杰 严天一 贾兆功 陆金更 林军


摘要:为兼顾车辆转向轻便性和操纵稳定性,并提高车辆的燃油经济性,本文采用恩智浦32位MPC5634主控芯片,对基于模型设计的电动助力转向系统策略进行研究。通过Simulink/Stateflow搭建助力控制策略、回正控制策略及阻尼控制策略的仿真模型,通过功能性和结构性测试之后,自动生成嵌入式C代码,通过软件在环(software in-the-loop,SIL)进行仿真测试,并通过实车标定试验和转向试验,验证电动助力转向系统控制策略的有效性。试验结果表明,在车辆怠速工况下,开启电动助力转向系统时,转矩传感器的转矩信号与关闭电动助力转向系统时转矩传感器的转矩信号相比,转矩传感器输出的最大转矩信号AD值由210降至174,转矩差值由助力电机提供的转矩弥补,说明所开发的电动助力转向系统具有较明显的助力效果,能够满足设计需求。该研究具有较好的应用前景。
关键词:电动助力转向系统; 电子控制单元; 控制策略; 性能试验
中图分类号: U463.4; U461.6文獻标识码: A
文章编号: 1006-9798(2020)02-0097-07; DOI: 10.13306/j.1006-9798.2020.02.015
车辆转向系统作为改变或恢复行驶方向的专设机构,保证车辆可以按照驾驶员意图进行转向行驶,其性能直接影响操纵稳定性[1]、乘坐舒适性[2]和安全性。随着汽车电子控制技术的发展,传统的机械转向系统已发展到更加智能化的电动助力转向系统[3]。电动助力转向系统作为一种新型助力转向系统,能够根据驾驶员意图和行驶工况提供实时转向助力,可以确保低速行驶时轻便灵活,而高速行驶时稳定可靠[4]。近年来,相关研究机构对电动助力转向系统及其控制技术展开研究。李绍松等人[5]通过无转角传感器的主动回正控制方法,改善了车辆回正性能;施国标等人[6]介绍了电动助力转向系统的匹配设计过程,提出助力特性与车型的匹配原则;吴锋等人[7]分析了电流闭环PI控制器的参数设计和电流给定算法设计与系统性能的关系。目前,通过模型设计方法进行电动助力转向系统策略开发的研究较少。因此,本文基于模型设计方法,搭建电动助力转向系统Simulink/Stateflow控制策略模型,自动生成嵌入式C代码,为了验证所提出的电动助力转向系统控制策略的有效性和可靠性,进行实车电动助力转向试验。通过实车试验,证明所开发的电动助力转向系统具有较明显的助力效果。该研究具有一定的实际应用价值。
1工作原理
电动助力转向系统主要由信号采集系统、电子控制单元、助力电机、减速机构和电磁离合器等组成[9],电动助力转向系统示意图如图1所示。信号采集系统采集转向盘转矩信号、转向盘转角信号、车速信号、助力电机电流信号[10]并传输到电子控制单元;电子控制单元通过信号采集系统获得的转矩信号、车速信号等判断助力电机的理想工作状态,计算得到目标控制电流大小,并控制助力电机输出合适的电磁转矩[11];助力电机是电动助力转向系统的动力源,在电子控制单元控制下输出相应的助力转矩[12],本文选用三相无刷电机作为电动助力转向系统的助力电机;减速机构与助力电机相连,起到降速增扭的作用[13];电磁离合器将辅助转向力矩施加到转向系统,实现实时控制的助力转向,同时避免电机转动惯性引起的不利影响。
2助力特性曲线与控制策略模型
2.1助力特性曲线
电动助力转向系统的功能需求主要包括分析助力控制模式、回正控制模式和阻尼控制模式的功能及可靠性的具体要求,确定各模式之间的切换条件和切换过程。
助力控制模式的核心是确定助力特性曲线及确定控制单元控制助力电流大小的方式,以满足不同工况下对助力扭矩的要求[14]。助力特性曲线通常通过实车道路试验对基本特性曲线进行调整获得[15-17],较为典型的有直线型、折线型和曲线型[18]。典型助力特性曲线如图2所示。
直线型助力特性曲线可表示为
式中,I为助力电机目标电流;f(v)为助力特性曲线梯度;Imax为助力电机最大工作电流;Td为转向盘输入力矩;Td0为电动助力转向系统开始工作时转向盘输入力矩;Tdmax为电机输出转矩最大时转向盘输入力矩。
折线型助力特性曲线可表示为
式中,f1(v)、f2(v)为助力特性曲线梯度;Td1为转向盘输入力矩。
曲线型助力特性曲线可表示为
式中,f(Td)为转向盘输入力矩非线性函数[19]。
若转向盘转角与角速度方向相反,需通过回正控制模式来改善转向回正特性,提高车辆的操纵稳定性;若转向盘转角与角速度方向相同,且车辆行驶速度达到或超过设定的速度阀值,则需通过阻尼控制模式来减轻转向盘抖动现象,同时防止出现转向盘回正超调状况[20]。
2.2控制策略模型
利用Simulink/Stateflow搭建电动助力转向系统控制策略模型,电动助力转向系统控制策略模型如图3所示。图3中,主要包括检查模块、助力控制模块、回正控制模块和阻尼控制模块等部分。
检测模块负责检测转矩传感器和速度传感器是否正常工作,然后根据传感器的输出信号判断应执行的控制模式。若转向盘转角与角速度的方向相同,且车速低于设定的阀值,进入助力控制模块,助力控制模块如图4所示。
转矩传感器的输出信号值决定助力电机的工作状态,若转向盘转矩的绝对值小于1 N·m,进入无助力子模块,该模式下助力电机不工作;若转向盘转矩的绝对值大于1 N·m且小于10 N·m,则进入助力变化子模块,该模式下,需根据车辆实际行驶速度,计算并输出变占空比的脉宽调制信号,控制助力电机输出所需的助力转矩;若转向盘转矩的绝对值大于10 N·m,进入助力不变子模块,该模式下,需根据车辆行驶速度,计算并输出固定占空比的脉宽调制信号,控制助力电机输出所需的助力转矩。
当转向盘转角和其角速度的方向相反时,进入回正控制模块,回正控制模块如图5所示。该模式下,需根据车辆的行驶工况,输出适当占空比的脉宽调制信号,控制助力电机输出回转助力或回正阻力,帮助驾驶员完成回正动作;若转向盘转角与角速度方向相同,且车辆实际行驶速度达到或超过设定的速度阀值,进入阻尼控制模块,阻尼控制模块如图6所示,该模式下,需根据方向盘输入的转矩方向和大小,控制助力电机输出合适的阻力以减轻振动。
2.3模型检查与验证
利用Simulink Design Verifier模块生成测试用例的仿真模型,需求文档与模型关联如图7所示。其中,Inputs模块包含转向盘转矩、转角及角速度信号、车速信号等系统控制策略模型测试用例;Test Case Explanation模块是对自动生成的测试用例的说明。共有25种测试用例仿真模型,测试用例如图8所示;Test Unit模块为前文所搭建的电动助力转向系统控制策略模型。运行测试仿真模型后,得到模型的覆盖度分析结果,模型覆盖度如图9所示,模型覆盖度报告显示,自动生成的测试用例具有较高的覆盖度,能够满足模型的测试需求。
2.4代码生成及验证
采用Matlab中的Embedded Coder模块,将搭建的电动助力转向控制策略模型转换为嵌入式C代码,并验证其有效性和可靠性,然后通过Configuration Parameters模块生成SIL仿真模型,并在控制策略模型中进行仿真,原控制策略仿真模型与SIL仿真模型对比如图10所示。由图10可以看出,图10b与图10a的输出结果相同,证明所生成的C代码能够有效运行,且功能与原控制模型保持一致。
3电子控制单元开发
电动助力转向系统的电子控制单元主要由电源模块、单片机最小系统模块、转向助力电机驱动模块、信息采集模块、信号调理模块、CAN通讯模块、电流检测模块等部分组成。
电动助力转向系统电子控制单元以恩智浦公司32位MPC5634单片机为主控芯片,该芯片集成了96 kB的RAM,1.5 M的Flash存储器,32个eTPU2通道,32个12 bit增强型模数转换通道,2个eSCI模块,2个DSPI模块,2个FlexCAN模块,逻辑运算和数值运算能力较强,具有浮点运算能力,最小系统的晶振频率为8 MHz。
4实车性能试验
4.1转矩信号标定
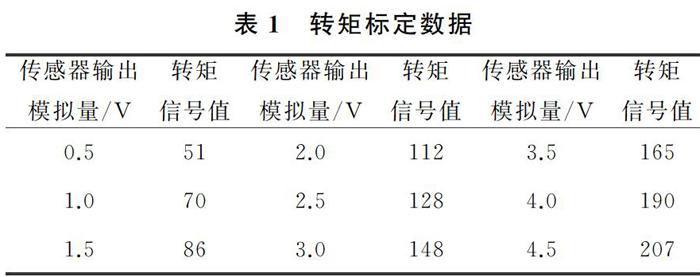
通过转矩标定试验,将转矩传感器输出的转矩模拟量转换为主控制器能够识别的转矩信号值,转矩信号值与转矩传感器输出模拟量的标定数据如表1所示。
对试验数据进行曲线拟合,得到转矩信号值标定曲线和车速标定曲线,转矩信号标定曲线如图11所示,转矩信号值与传感器输出模拟量的关系为
y=0.025 4x-0.768 8 ( 4)
式中,y為转矩模拟量;x为转矩传感器输出值。
4.2速度信号标定
通过车速标定试验将车速传感器输出的数字频率信号转换为实际车速值,实际车速与车速传感器单位时间输出脉冲数的标定数据如表2所示。
对试验数据曲线拟合,得到车速信号标定曲线,车速信号标定曲线如图12所示。车速与脉冲数的关系为
ν=0.202n+0.732 8 (5)
式中,v为车速;n为脉冲数。
4.3实车性能试验
为了验证所提出的电动助力转向系统控制策略的有效性,进行实车电动助力转向试验,试验车样车如图13所示。通过采集转矩传感器的转矩信号,得到转向盘转矩的变化曲线,原地转向时,有助力与无助力转矩值比较如图14所示。
由图14可以看出,在车辆怠速工况下,开启电动助力转向系统时,转矩传感器的转矩信号与关闭电动助力转向系统时转矩传感器的转矩信号相比,转矩传感器输出的最大转矩信号AD值从210降低到174,转矩差值由助力电机提供的转矩弥补,证明所开发的电动助力转向系统具有较明显的助力效果。
5结束语
本文基于模型设计方法对电动助力转向系统功能进行层次化划分,搭建Simulink/Stateflow控制策略模型,可以在测试过程中快速检查错误,直接生成稳定的嵌入式代码,缩短产品开发周期,提高效率;实车试验数据显示,开启电动助力转向系统后,试验车转向所需驾驶员提供的力矩明显降低,证明该电动助力转向系统可以有效为驾驶员提供实时转向助力,验证了所开发电动助力转向系统控制策略的有效性。但在试验过程中,发现电动助力系统长时间满负荷工作会导致电机驱动模块发热严重,有待电子控制单元及其控制策略的进一步研究完善。
参考文献:
[1]高勇, 陈龙, 袁传义, 等. 电动助力转向系统回正控制研究[J]. 农业机械学报, 2007, 38(5) : 6-10.
[2]张昕, 施国标, 林逸. 电动助力转向的转向感觉客观综合评价[J]. 机械工程学报, 2009, 45(6): 171-175.
[3]吕英超, 季学武, 孙宁, 等. EPS用PMSM弱磁控制策略的仿真与试验研究[J]. 汽车工程, 2013, 35(6) : 500-504.
[4]林逸, 施国标, 邹常丰, 等. 电动助力转向系统转向性能的客观评价. 农业机械学报, 2003, 34(4): 4-7.
[5]李绍松, 宗长富, 吴振晰, 等. 电动助力转向主动回正控制方法[J]. 吉林大学学报: 工程技术版, 2012, 42(6): 65-71.
[6]施国标, 林逸, 邹常丰, 等. 电动助力转向系统匹配设计的研究[J]. 公路交通科技, 2003, 20(5): 125-128.
[7]吴峰, 杨志家, 姚栋伟, 等. 电动助力转向系统控制策略的研究[J]. 汽车工程, 2006, 28(7): 676-680.
[8]陆金更. 基于模型的电动助力转向系统策略开发及其试验研究[D]. 青岛: 青岛大学, 2018.
[9]王倩, 蔺毅. 汽车动力转向系统的发展[J]. 农业装备与车辆工程, 2009(3): 45-46, 52.
[10]何泽刚, 申荣卫, 谢康, 等. 直流无刷电动机的汽车电动助力转向系统控制策略研究[J]. 现代制造工程, 2015(2): 57-61.
[11]于建成. 汽车电动助力转向系统的研究与开发[D]. 大连: 大连理工大学, 2005.
[12]陈诚. 基于PSoC的无刷直流电机控制系统研究[D]. 天津: 天津大学, 2005.
[13]李书龙, 许超, 杨智. 汽车电动助力转向系统硬件设计[J]. 机电工程, 2004, 21(1): 5-7.
[14]邓利军, 张琎, 王书贤. EPS系统助力特性与控制策略研究[J]. 农业装备与车辆工程, 2010(10): 19-22.
[15]杨树, 唐新蓬. 汽车电动助力转向系转向盘力特性的初步研究[J]. 汽车科技, 2003(3): 19-21.
[16]唐新蓬, 杨树. 电动助力转向系统与汽车转向盘力特性的仿真研究[J]. 机械科学与技术, 2005, 24(12): 1387-1390.
[17]宋贵勇, 张洪欣. 常规转向系统的路感特性及其改善途径[J]. 上海汽车, 2000(5): 17-23.
[18]刘照. 汽车电动助力转向系统动力学分析与控制方法研究[D]. 武汉: 华中科技大学机械学院, 2005: 65-74.
[19]王若平, 李千, 高翔. 闭式电控液压助力转向直线型助力特性的设计[J]. 汽车工程, 2012, 34(3) : 255-259.
[20]何正义, 季学武, 张雪峰. 永磁同步电机EPS的阻尼控制[J]. 电力电子技术, 2008, 42(5) : 66-68.
Study on the Strategy of EPS System Based on Model Design
LIU Shijie1, YAN Tianyi1, JIA Zhaogong1, LU Jingeng2, LIN Jun3
(1. School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China; 2. Huahai Technologies Co., Ltd., Beijing 100000, China; 3. Qingdao Three-Star Precision Forging Gear Co., Ltd., Qingdao 266000, China)
Abstract:In order to take into account the vehicle steering lightness and control stability, reduce fuel consumption, this paper used NXP 32-bit MPC5634 microcontroller to study the Strategy of EPS System Based on Model Design. We build the Simulink/Stateflow control strategy model, carry out structural and functional tests, generate embedded code and verify through the SIL(software in-the-loop) test. Then, we verify the effectiveness of the electric power steering system control strategy through real vehicle calibration test and steering test. The test results show that when the electric power steering system is turned on, the torque signal of the torque sensor is compared with that of the torque sensor when the electric power steering system is turned off, the maximum torque signal AD value of the torque sensor is reduced from 210 to 174, and the torque difference is compensated by the torque provided by the booster motor. It shows that the developed electric power steering system has obvious power assist effect and can meet the design requirements. This research has a good application prospect.
Key words:electric power steering; electronic control unit; control strategy; performance test
收稿日期: 2019-12-24; 修回日期: 2020-02-28
基金項目: 山东省自然科学基金面上项目(ZR2016EEM49);国家自然科学基金资助项目(51475248)
作者简介: 刘世杰(1993-),男,硕士研究生,主要研究方向为汽车动态仿真与控制技术。
通信作者: 严天一(1970-),男,博士,教授,硕士生导师,主要研究方向为车辆系统动力学及其控制技术。 Email: yan_7012@126.com
