基于永磁同步电机模型的滑模矢量控制策略研究
2020-05-20徐晓通华青松张洪信邱瑞林
徐晓通 华青松 张洪信 邱瑞林


摘要:针对传统矢量控制方式永磁同步电机(permanent magnet synchronous motor,PMSM)存在的低速时启动电流及转速超调量过大等问题,本文利用指数趋近率,设计了一种基于滑模变结构的矢量控制策略。首先利用矢量控制(field oriented control,FOC)方式进行分析,结合选取的矢量控制方式进行滑模趋近率的选取,并采用Matlab/Simulink软件对永磁同步电机及所提出的控制策略进行建模,对所设计的永磁同步电机控制系统进行仿真分析。仿真结果表明,在所设计的滑模矢量控制模式下,加速过程中,系统会出现小幅度的超调,但能在0.05 s内使电机达到指定转速;负载转矩抗干扰能力较强,稳态性能良好;电流控制效果良好,且在允许范围内逐步减弱至平衡态。本文设计的滑模控制具有良好的转速控制性能。该研究为后期实物验证提供了理论支持。
关键词:永磁同步电机; 趋近率; 滑模控制; 矢量控制
中图分类号: TM351文献标识码: A
文章编号: 1006-9798(2020)02-0069-06; DOI: 10.13306/j.1006-9798.2020.02.011
永磁同步电机具有可靠性高、效率高、转矩脉动小等优点,永磁技术在汽车和工业领域的应用越来越广泛[1-4]。但永磁同步电机是一个集磁链、电流和转速等多变量为一体的耦合系统,但由于外部干扰的介入,使其控制十分困难。滑模控制作为一种具有高鲁棒性和高快速性的非线性控制策略,非常适用于永磁同步电机的控制特性[5-7]。目前,对永磁同步电机控制特性的研究有很多。李芳等人[8]介绍了一种基于模糊控制的永磁同步电机控制策略,虽然该控制策略能够使电机达到预期转速,但启动过程中转速波动较大;饶美丽等人[9]介绍了一种将滑模面建立在ABC坐标系下的控制方法,但控制方法建模困难,且参数求解不准确;吕刚震等人[10]介绍了一种基于普通趋近率的滑模策略,虽然其控制效果良好,但快速性方面有待提高;Tian B等人[11]研究了一种基于反电势的五相永磁电机的滑模控制策略,但由于三次谐波的不稳定性,使输出转矩不稳定;Wang S Y等人[12]介绍了一种滑模控制和模糊理论集成的控制方式,在快速启动时未得到验证;P. Q. Khanh等人[13]介绍了神经矢量控制在汽车上的应用,虽然控制精确,却需要对数据进行权重分析,不同工况的适用性较差;J. Lara等人[14]提出使用高频信号注入的方法进行控制器的设计,虽然降低了转矩纹波,但效率较低。基于此,为保证控制过程的快速性和较小的系统抖振,本文利用指数趋近率,设计了一种基于滑模变结构的矢量控制策略,不仅具有矢量控制的低脉动,同时加强了快速性和稳定性。仿真结果表明,在该控制策略下,电机具有良好的动态性和鲁棒性。
1矢量控制方式分析
常用的矢量控制方案包括id=0控制、最大转矩电流比控制、弱磁控制和恒磁链控制[15]等4种。
1)id=0控制。对于表贴式电机,定子电流is在该控制方案下可以保证与永磁体只存在交轴分量,由定子所产生的电流全部用于做功驱动转子旋转,因此表现为输出转矩最大,不对永磁体磁场进行削弱。此时可得电磁转矩以电流为变量的线性方程,此控制方式较简单,只能用于表贴式转子,内嵌式转子所特有的磁阻转矩在此方法下无法得到有效利用[16]。
2)最大转矩电流比控制。力矩电流比最大控制能使电池输出功率一定时电机的定子电流最小,也可称之为最大转矩电流比控制,这一方法适用于能够产生磁阻转矩的嵌入式转子,表贴式转子的交直轴电感在数值上相等,若使用此方向,则与id=0控制方式效果相当[17]。在使用嵌入式转子的电机中若,采用最大转矩电流比控制方式,通过将交直轴电流按照一定的规律进行控制,可以获得输入功率一定情况下的最大转矩。
3)弱磁控制。在定转子设计成型后,PMSM的物理特性就已经确定,这些固有特性无法进行更改,若在系统输入量以及负载量固定时,通过传统方法可能无法实现性能的再次提升,由此引入了弱磁控制[18]。若在高速小扭矩情况下想利用固定系统获得更高的性能(主要是转速),需要定子电流在交轴上产生负分量,以实现直轴上的去磁作用。通过调节定子电流所产生的负分量,即可调整弱磁效果的强弱,但介于永磁体性能,弱磁效果不能无限增强,否则会导致永久退磁,转子无法正常工作,一般只弱磁使转速达到传统控制方式的2倍左右。
4)恒磁链控制。该方法通过控制定子电流使合成磁链的幅值保持为定值,该值大小等于转子上的磁链幅值。在此方法下,可以获得相对较高的功率因数,并使用较小的控制器容量,由此可减小系统整体的体积,实现系统小型化。但此方法下无法获得最大转矩,可能影响电动汽车的驾驶性能,导致体验感下降[19]。
通过分析比较上述4种控制方案,针对表贴式永磁同步电机的特性,本文采用id=0控制方案,该方案可在有限的能量作用下输出最高转矩,保障电机输出性能。
2滑模控制趋近率的确定
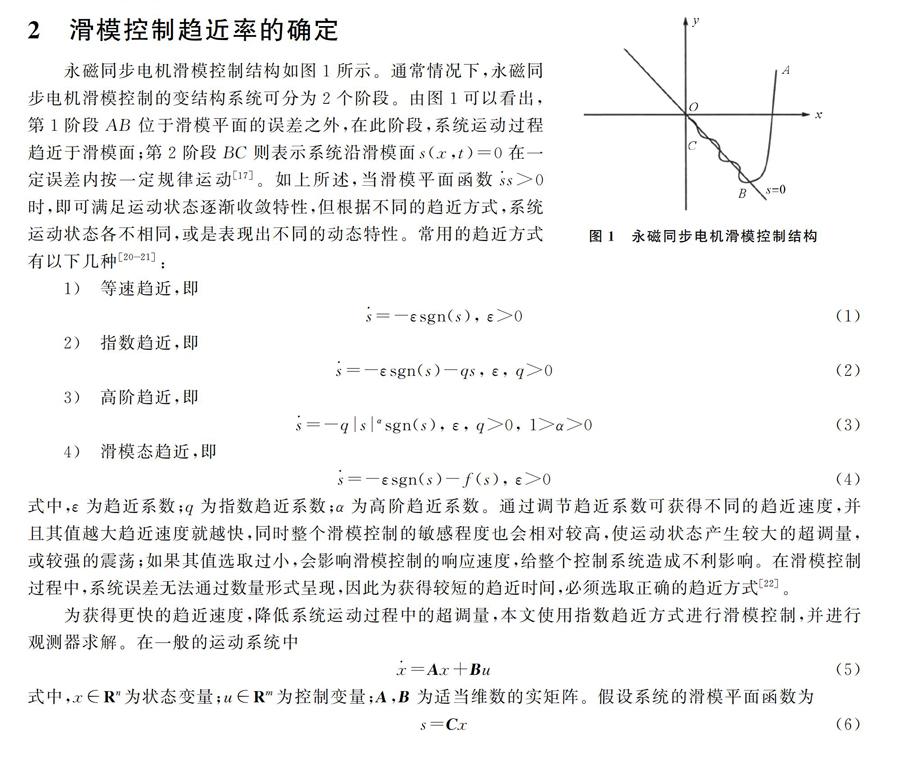
永磁同步电机滑模控制结构如图1所示。通常情况下,永磁同步电机滑模控制的变结构系统可分为2个阶段。由图1可以看出,第1階段AB位于滑模平面的误差之外,在此阶段,系统运动过程趋近于滑模面;第2阶段BC则表示系统沿滑模面s(x,t)=0在一定误差内按一定规律运动[17]。如上所述,当滑模平面函数s>0时,即可满足运动状态逐渐收敛特性,但根据不同的趋近方式,系统运动状态各不相同,或是表现出不同的动态特性。常用的趋近方式有以下几种[20-21]:
1)等速趋近,即
2)指数趋近,即
3)高阶趋近,即
4)滑模态趋近,即
式中,ε为趋近系数;q为指数趋近系数;α为高阶趋近系数。通过调节趋近系数可获得不同的趋近速度,并且其值越大趋近速度就越快,同时整个滑模控制的敏感程度也会相对较高,使运动状态产生较大的超调量,或较强的震荡;如果其值选取过小,会影响滑模控制的响应速度,给整个控制系统造成不利影响。在滑模控制过程中,系统误差无法通过数量形式呈现,因此为获得较短的趋近时间,必须选取正确的趋近方式[22]。
为获得更快的趋近速度,降低系统运动过程中的超调量,本文使用指数趋近方式进行滑模控制,并进行观测器求解。在一般的运动系统中
式中,x∈Rn为状态变量;u∈Rm为控制变量;A,B为适当维数的实矩阵。假设系统的滑模平面函数为
式中,s∈Rm为滑膜平面函数;C∈Rnxm为适当的向量,C可使系统获得期望的动态特性。
对平面函数求导,得
由式(6)和式(7)得,滑模控制器u为
将所求取的滑模控制器带入系统可达性公式s中,初步验证其正确性,即永磁同步电机在此控制器下进行的运动状态能够实现向滑模平面的渐进稳定。
3滑模速度控制器设计
为与矢量控制结合,方便后期控制策略的搭建,该设计采用dq坐标下永磁同步电机数学模型进行滑模速度控制器的设计。其中,PMSM的数学模型为
式中,U、i、L、ψ、分别表示机电液耦合器定子电压、电流、电感、磁链在dq轴上的分量;Rs、J、TL分别为定子内阻、转动惯量、负载转矩。由于本文利用id=0的矢量控制方式进行控制策略设计,已取得预期的效果,因此可根据上述控制方式,将式(9)中的数学模型变换为
定义电机内的状态变量为
其中,ωref是PMSM参考速度,一般人为设定一目标值;ωm为实际转速。将式(10)和式(11)结合,运算得
定义滑模控制器输入u=q,D=3pψm/2J可将式(12)变换为
根据状态变量,对滑模面函数进行定义,即
式中,c>0为所需设计的参数值。为计算可到达性,将式(14)进行求导,得
根据本小节基本原理中选择的指数趋近方式,可得控制器表达式为
结合式(16),可得交轴的参考电流为
由式(17)可知,计算公式由积分组成,相当于给控制器添加了稳定环,能够提高系统在整个过程中的稳定性,不仅可以解决因为选取趋近常数太大而导致的抖振现象,还能去除系统在稳态时的误差,进而提高整个系统的控制性能和品质[23]。
通过验证可到达性不等式,证明式(16)所设计的控制器能够使系统运动状态趋于稳定状态。滑模矢量控制框图如图2所示,在传统PI矢量控制基础上,加入滑模控制模块,在测得PMSM的电流和位置信息后,通过坐标变换反馈到主通道中,完成电流速度双闭环模式的电机控制。
4滑模矢量控制仿真验证
在Simulink中搭建滑模矢量控制策略仿真模型,对所设计的永磁同步电机控制系统进行转速和动态响应特性分析。在仿真过程中,设置电机参数为:定子电阻Rs=2.08 Ω,定子电感L=8.35×10-4 H,永磁体磁链Ψm=0.175 Wb,转動惯量J=3×10-3 kg/m2,极对数为3,输入电压Udc=311 V。电机转速曲线如图3所示,电机转矩曲线如图4所示,检测到定子三相电流,定子三相电流曲线如图5所示。
仿真过程中,使电机以0转矩启动,检测在空载条件下,控制系统由静止加速到1 000 r/m的快速性及稳定性;在0.2 s时,给电机添加负载转矩,测试控制系统在负载突变情况下的稳定性和稳态调整能力。
由图3可以看出,在SMCFOC控制模式下,虽然在加速过程中会出现小幅度的超调,但是系统的快速性很高,能在0.05 s内使电机达到指定转速;当负载转矩突变时,转速波动不到10%,抗干扰能力较强;在负载不变时,稳态性能良好,转速稳定。由图4可以看出,电机启动时,系统可提供超大扭矩,使电机快速启动,且在0.02 s电机获得足够动能;当外部负载突变时,也能在0.02 s内达到平衡态;稳态时,转矩脉动较小,曲线平稳在滑模面附近摆动。由图4还可以看出,稳态时,电流曲线圆滑、无毛刺,控制效果良好;负载变化小时加速平稳,突变时电流在允许范围内逐步减弱至平衡态。
5结束语
本文主要对永磁同步电机模型的滑膜矢量控制策略进行研究,提出一种永磁同步电机滑模变结构的矢量控制方法,在原矢量控制基础上,加入滑模面进行模糊控制,而且通过电流、转速双闭环结构对电机的转速、转矩进行精确控制。在分析介绍控制方式的基本原理后,将所建立的数学模型在Simulink中进行仿真验证,验证结果表明,该控制方法控制效果良好,具有快速响应性好、转矩脉动低、稳态误差小等优点。本文所述方法相对于传统矢量控制方法,改进效果显著。后期将对滑模面进一步优化,可获得更好的控制效果,以便为实物验证提供理论支持。
参考文献:
[1]朱鲁佳. 电动汽车用永磁同步电机驱动系统的高性能控制[J]. 电机与控制应用, 2015, 42(2): 56-59.
[2]易伯瑜, 康龙云, 陶思念, 等. 永磁同步电机抗扰高阶淆模观测器设计学报[J]. 电工技术学报, 2014, 29(5): 133-138.
[3]张晓光, 赵克, 孙力, 等. 永磁同步电机滑模变结构调速系统动态品质控制[J]. 中国电机工程学报, 2011, 31(15): 47-52.
[4]张晓光, 孙力, 赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J]. 中国电机工程学报, 2012, 32(3): 111-116.
[5]Corradini M L, Ippoliti G, Longhi S, et al. A quasisliding mode approach for robust control and speed estimation of pm synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2012, 59(2): 1096-1104.
[6]Malesani L, Spiazzi R G, Tenti P. Performance optimization of cuk converters by slidingmode control[J]. IEEE Transactions on Power Electronics, 1995, 10(3): 302-309.
[7]肖海峰, 刘海龙, 贺昱曜, 等. 线性-滑模变结构的IPMSM直接转矩控制研究[J]. 控制工程, 2015, 22(1): 144-149.
[8]李芳, 王毓顺, 张家瑞. 基于模糊 PI 控制的永磁同步电机的建模与仿真[J]. 工业控制计算机, 2013, 26(8): 73-74.
[9]饶美丽, 徐增勇. 基于固定开关频率的永磁同步电机滑模控制[J]. 电气传动, 2019, 49(6): 17-23.
[10]贾洪平, 孙丹, 贺益康. 基于滑模变结构的永磁同步电机直接转矩控制[J]. 中国电机工程学报, 2006, 26(20): 134-138.
[11]Tian B, An Q T, Duan J D, et al. Decoupled modeling and nonlinear speed control for fivephase pm motor under singlephase open fault[J]. IEEE Transactions on Power Electronics, 2016, 99: 5473 - 5486.
[12]Wang S Y, Lin C M, Tseng ChwanLu, et al. Design of a fuzzy slidingmode controller for induction motor vector control systems[C]∥2016 International Automatic Control Conference, Taichung, Taiwan: IEEE, 2016: 17-27.
[13]Khanh P Q, Anh H P H, Kien C V. Advanced sensorless control of IPMSM motor using adaptive neural FOC approach[J]. Applied Mechanics and Materials, 2019, 894: 149-157.
[14]Lara J, Chandra A. Performance investigation of two novel HSFSI demodulation algorithms for encoderless FOC of PMSMs intended for EV propulsion[J]. IEEE Transactions on Industrial Electronics, 2017: 1074-1083.
[15]尚喆. 永磁同步電机磁场定向控制的研究[D]. 杭州: 浙江大学, 2007.
[16]Bose B K. A highperformance inverterfed drive system of an interior permanent magnet synchronous machine[J]. IEEE Transactions on Industry Applications, 1988, 24(6): 987-997.
[17]Saiyad Mahammadsoaib M, Patel Sajid M. Vector controlled PMSM drive using SVPWM techniqueA MATLAB / Simulink implementation[C]∥International Conference on Electrical, Electronics, Signals, Communication and Optimization. Paris: IEEE, 2015: 1-5.
[18]Boby K, Kottalil A M, Ananthamoorthy N P. Mathematical modelling of PMSM vector control system based on SVPWM with PI controller using MATLAB[C]∥International Jornal of Advanced Research in Electrical Electronics and Instrumentation Engineering, 2013: 856-902.
[19]Middleton R H, Goodwin G C. Digital control and estimation: a unified approach[J]. Prentice Hall Intemational Editions, 2004, 3(2): 15-22.
[20]Zhang X, Sun L, Zhao K. Nonlinear speed control for PMSM system using slidingmode control and disturbance compensation techniques[J]. IEEE Transactions on Power Electronics, 2013, 28(3): 1358- 1365.
[21]Kim W, Shin D, Chung C C. Micro stepping using a disturbance observer and a variable structure controller for permanentmagnet stepper motors[J]. IEEE Transactions on Industrial Electron, 2012, 60(7): 2689-2699.
[22]张袅娜, 许祥军, 林晓梅. 基于二阶滑模的永磁同步电动机直接转矩控制[J]. 微电动机, 2010, 43(10): 33-35.
[23]李琳. 滑模变结构控制系统抖振抑制方法的研究[D]. 大连: 大连理工大学, 2006.
Research on Sliding Mode Vector Control Strategy Based on Permanent Magnet Synchronous Motor Model
XU Xiaotong, HUA Qingsong, ZHANG Hongxin, QIU Ruilin
(School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China)
Abstract:Aiming at a series of problems of the permanent magnet synchronous motor (PMSM) of the traditional vector control method at low speed, such as excessive starting current and excessive speed overshoot, this paper uses an exponential approach to design a slipbased Vector control strategy for modal structure. Firstly, the vector control (field oriented control, FOC) method is analyzed, and the sliding mode approach rate is selected based on the selected vector control method. The permanent magnet synchronous motor and the proposed control strategy are modeled with Matlab/Simulink. The designed permanent magnet synchronous motor control system is simulated and analyzed. The simulation results show that under the designed sliding mode vector control mode, during the acceleration process, the system will have a small overshoot, but the motor can reach the specified speed within 0.05 s;the load torque has a strong antiinterference ability. The steadystate performance is good;the current control effect is good, and it gradually decreases to the equilibrium state within the allowable range. It shows that the designed sliding mode control has good speed control performance. This research provides theoretical support for later physical verification.
Key words:permanent magnet synchronous motor; approaching rate; sliding mode control; vector control
收稿日期: 2020-01-31; 修回日期: 2020-02-14
作者簡介: 徐晓通(1995-),男,硕士研究生,主要研究方向为电动汽车智能化。
通信作者: 张洪信(1969-),男,工学博士,教授,硕士生导师,主要研究方向为车辆新型动力传动技术设计及仿真。 Email: qduzhx@126.com
